最近更新于 2024-05-05 14:18
测试环境:
Jetson Nano - JP 4.6 (Ubuntu 18.04 arm64) 乐视三合一体感摄像头 LeTMC-520(对等 Orbbec 3D Astra Pro 相机)

1.安装 ROS,照着官方教程走就行:http://wiki.ros.org/cn/melodic/Installation/Ubuntu(安装桌面完整版)
2.安装相机驱动 astra_camera_ros,跟着项目主页的说明操作:https://github.com/orbbec/ros_astra_camera
点云图
1.编辑配置文件
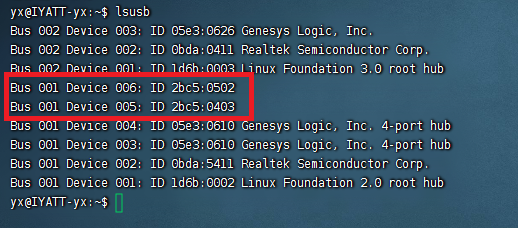
将相机插到 Jetson Nano上,执行命令查询设备号
lsusb
502 是彩色相机(记住),403 是深度相机
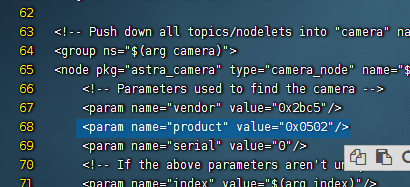
编辑 ~/catkin_ws/src/ros_astra_camera/launch/astrapro.launch,找到 name=”product” 的位置,将 value 改为上面查询到的彩色相机的设备号
然后创建点云图配置文件
mkdir -p ~/catkin_ws/src/rviz touch ~/catkin_ws/src/rviz/depth_camera.rviz
编辑 ~/catkin_ws/src/rviz/depth_camera.rviz,写入如下内容
Panels:
- Class: rviz/Displays
Help Height: 88
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
- /Grid1
- /PointCloud21
Splitter Ratio: 0.5
Tree Height: 453
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.588679016
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: PointCloud2
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz/Grid
Color: 159; 147; 147
Enabled: true
Line Style:
Line Width: 0.0299999993
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XZ
Plane Cell Count: 10
Reference Frame: camera_depth_optical_frame
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 8.875
Min Value: 1.28500009
Value: true
Axis: X
Channel Name: intensity
Class: rviz/PointCloud2
Color: 255; 255; 255
Color Transformer: AxisColor
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 4096
Min Color: 0; 0; 0
Min Intensity: 0
Name: PointCloud2
Position Transformer: XYZ
Queue Size: 10
Selectable: true
Size (Pixels): 3
Size (m): 0.00999999978
Style: Squares
Topic: /camera/depth/points
Unreliable: false
Use Fixed Frame: true
Use rainbow: true
Value: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Default Light: true
Fixed Frame: camera_depth_frame
Frame Rate: 30
Name: root
Tools:
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/MoveCamera
- Class: rviz/Select
- Class: rviz/FocusCamera
- Class: rviz/Measure
- Class: rviz/SetInitialPose
Topic: /initialpose
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
- Class: rviz/PublishPoint
Single click: true
Topic: /clicked_point
Value: true
Views:
Current:
Class: rviz/Orbit
Distance: 7.51409006
Enable Stereo Rendering:
Stereo Eye Separation: 0.0599999987
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: 2.80641723
Y: -0.0263374168
Z: -0.295807391
Focal Shape Fixed Size: true
Focal Shape Size: 0.0500000007
Invert Z Axis: false
Name: Current View
Near Clip Distance: 0.00999999978
Pitch: 0.305203468
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Yaw: 3.89040422
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 744
Hide Left Dock: false
Hide Right Dock: true
QMainWindow State: 000000ff00000000fd00000004000000000000016a0000025efc0200000009fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006100fffffffb0000001e0054006f006f006c002000500072006f0070006500720074006900650073020000019b000001b500000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c00610079007301000000280000025e000000d700fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261fb0000000a0049006d00610067006500000001a9000001430000000000000000000000010000010f000002c4fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a005600690065007700730000000028000002c4000000ad00fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000005150000003efc0100000002fb0000000800540069006d00650100000000000005150000030000fffffffb0000000800540069006d00650100000000000004500000000000000000000003a50000025e00000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: true
Width: 1301
X: 65
Y: 24
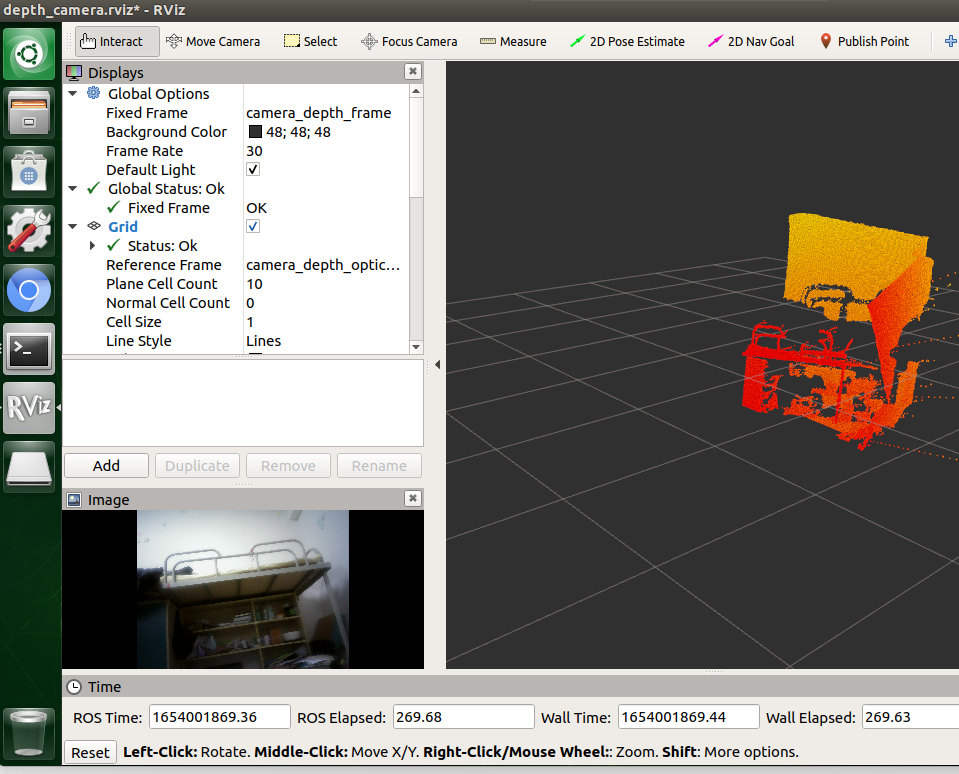
2.查看点云图
启动相机
# 刷新环境 echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc source ~/.bashrc # 启动 roslaunch astra_camera astrapro.launch
另外打开一个终端启动 rviz
rosrun rviz rviz -d /home/yx/catkin_ws/src/rviz/depth_camera.rviz
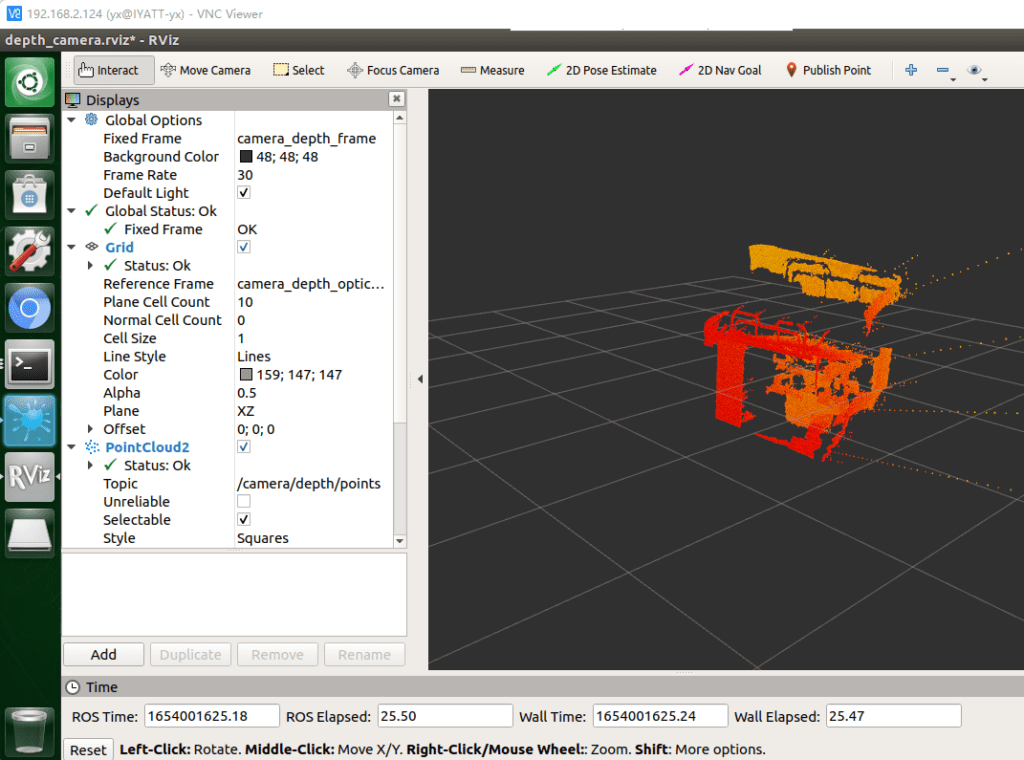
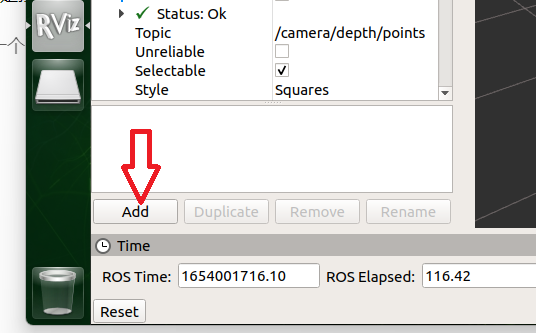
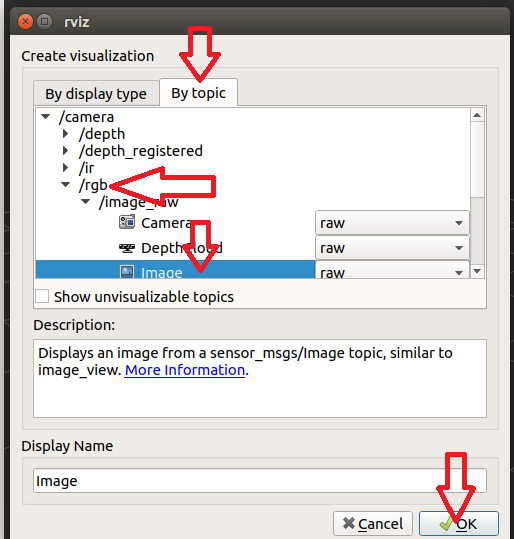
现在显示的就是扫描的点云图(深度相机采集的数据),这里再添加一下彩色相机图
SLAM
注:准备好科学上网
1.安装依赖
安装 OpenCV 3.2.0
sudo apt install -y libavcodec-dev libavformat-dev libswscale-dev libv4l-dev libxvidcore-dev libx264-dev libatlas-base-dev gfortran libgtk2.0-dev libjpeg-dev libpng-dev libgtk-3-dev libdc1394-22-dev libtesseract-dev libtiff-dev libatlas-base-dev libdw-dev libunwind-dev libgmp-dev libgsl-dev libgslcblas0 flex bison libgst-dev libcap-dev build-essential cmake git pkg-config ffmpeg libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev libvulkan-dev libvulkan1 mesa-vulkan-drivers cd ~/catkin_ws/src git clone https://github.com/opencv/opencv.git --branch 3.2.0 --depth=1 cd oepncv git clone https://github.com/opencv/opencv_contrib.git --branch 3.2.0 --depth=1 ### 以 root 权限编辑 /usr/include/c++/7/cstdlib,在 75 行找到 “#include_next <stdlib.h>”,改为 “#include <stdlib.h>” ### 以 root 权限编辑 /usr/include/c++/7/bits/std_abs.h,在 38 行找到 “#include_next <stdlib.h>”,改为 “#include <stdlib.h>” ### 以 root 权限编辑 /usr/include/c++/7/cmath,在 45 行找到 “#include_next <math.h>”,改为 “#include <math.h>” mkdir build && cd build cmake -DCMAKE_BUILD_TYPE=RELEASE -DBUILD_opencv_python2=ON -DBUILD_opencv_python3=ON -DOPENCV_ENABLE_NONFREE=ON -DBUILD_TESTS=OFF -DBUILD_FAT_JAVA_LIB=OFF -DBUILD_EXAMPLES=OFF -DOPENCV_EXTRA_MODULES_PATH=../opencv_contrib/modules -DOPENCV_GENERATE_PKGCONFIG=ON -DWITH_CUDA=OFF .. sudo make install -j4
安装 Pangolin 0.8
cd ~/catkin_ws/src git clone --recursive https://github.com/stevenlovegrove/Pangolin.git --depth=1 --branch=v0.8 cd Pangolin ./scripts/install_prerequisites.sh recommended mkdir build && cd build cmake .. make -j4
安装其它依赖
sudo apt install -y libeigen3-dev
2.安装 ORB_SLAM3
cd ~/catkin_ws/src git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git --depth=1 --branch=v1.0-release cd ORB_SLAM3 ### 编辑 build.sh,凡是出现 “make -j” 的地方都替换为 “make -j1”,避免内存不够且因为占用过高被系统杀死。(不建议加交换分区,Jetson Nano 的“磁盘”是外置内存卡,把内存虚拟在内存卡上速度慢得要命,不如降低编译线程,说不定更快) ### 编辑 CMakeLists.txt,找到 “find_package(OpenCV 4.4)”,改为 “find_package(OpenCV 3.2)” ./build.sh cd Examples_old/ROS/ORB_SLAM3 ### 编辑 CMakeLists.txt,找到 “find_package(OpenCV 3.0 QUIET)” 改为 “find_package(OpenCV 3.2 QUIET)” ### 编辑 src/AR/ros_mono_ar.cc,找到 151 行的 “cv::Mat Tcw = mpSLAM->TrackMonocular(cv_ptr->image,cv_ptr->header.stamp.toSec());” 改为: “ cv::Mat Tcw; Sophus::SE3f Tcw_SE3f = mpSLAM->TrackMonocular(cv_ptr->image,cv_ptr->header.stamp.toSec()); Eigen::Matrix4f Tcw_Matrix = Tcw_SE3f.matrix(); cv::eigen2cv(Tcw_Matrix, Tcw); ” 然后在开头引入头文件的地方添加包含下面两个头文件: “ #include <Eigen/Dense> #include <opencv2/core/eigen.hpp> ” ### 编辑 src/AR/ViewerAR.cc,在 530 行找到 “cv::Mat Xw = pMP->GetWorldPos();”,改为: “ cv::Mat Xw; cv::eigen2cv(pMP->GetWorldPos(), Xw); ” 然后在开头引入头文件的地方添加包含下面两个头文件: “ #include <Eigen/Dense> #include <opencv2/core/eigen.hpp> ” 在 407 行左右的位置找到 “ vPoints.push_back(pMP->GetWorldPos()); vPointMP.push_back(pMP); ”,改为: “ cv::Mat WorldPos; cv::eigen2cv(pMP->GetWorldPos(), WorldPos); vPoints.push_back(WorldPos); ” mkdir -p build && cd build cmake .. make
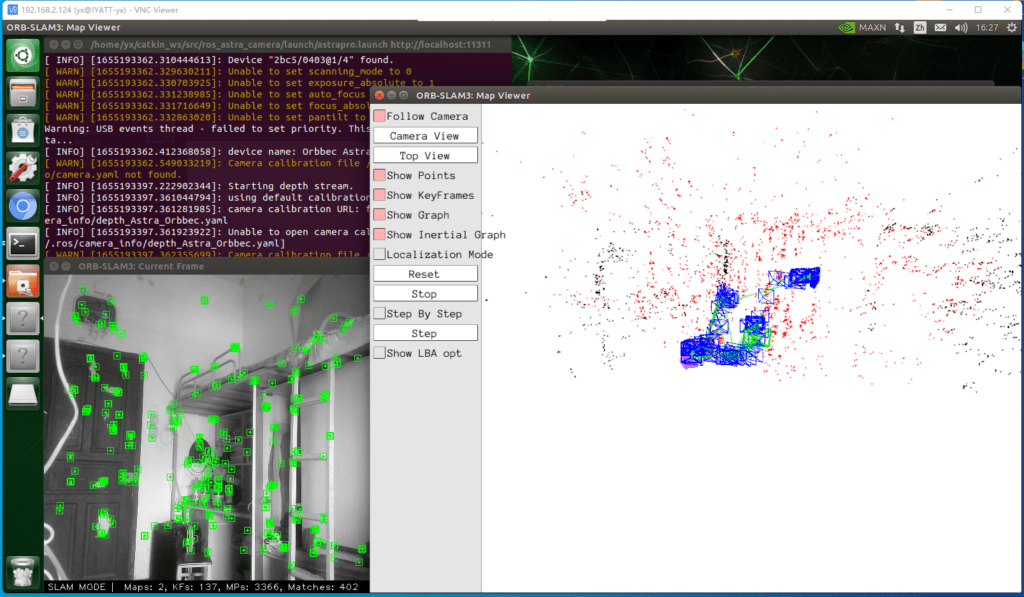
3.运行 SLAM 程序
# 打开一个终端执行命令启动相机 roslaunch astra_camera astrapro.launch # 再打开一个终端运行 SLAM 程序 rosrun ORB_SLAM3 RGBD ~/catkin_ws/src/ORB_SLAM3/Vocabulary/ORBvoc.txt ~/catkin_ws/src/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/Asus.yaml
Jetson Nano + ROS + 乐视体感相机视觉 SLAM