最近更新于 2025-05-11 20:43
平面四杆机构的类型
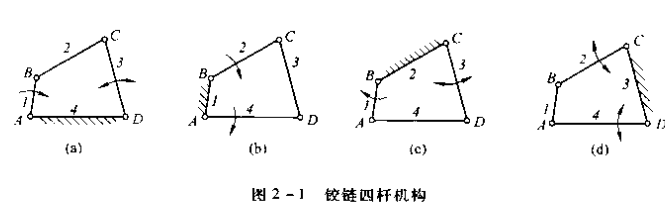
铰链四杆机构
全部用转动副相连的平面四杆机构。
4 为机架,与机架连接的 1 和 3 为连架杆,不与机架直接连接的 2 为连杆。
若组成转动副的两构件能作整周相对运动,则称该转动副为整转副,否则称为摆动幅。
与机架组成整转副的连架杆称为曲柄,与机架组成摆动幅的连杆称为摇杆。
根据连架杆是曲柄还是摇杆,将铰链四杆机构分为:曲柄摇杆机构、双曲柄机构和双摇杆机构。
曲柄摇杆机构
图 2-1 a 中 A 为整转副,D 为摆动幅,即 1 为曲柄,3 为摇杆,此时则为曲柄摇杆机构。
此时 B 必为转动副,C 必为摆动幅。通常曲柄为原动件,作匀速转动,摇杆为从动件,作变速往复摆动。

双曲柄机构
图 2-1 b 中 A 和 B 都为整转副,即 2 和 4 均为曲柄,此时为双曲柄机构。
其中 C 和 D 可以是整转副也可以是摆动幅。
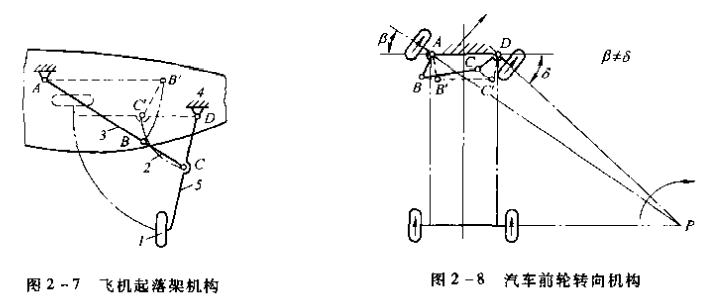
双摇杆机构
图 2-1 d 中,C 和 D 都为摆动幅,即 2 和 4 均为摇杆,此时为双摇杆机构。
其中 A 和 B 可以是整转副或摆动幅。
含一个移动副的四杆机构
曲柄滑块机构
如下图所示,1 为曲柄,滑块 3 相对于机架 4 作往复运动,该机构即为曲柄滑块机构。
若 C 点运动轨迹通过曲柄转动中心 A,则称为对心曲柄滑块机构;若 C 点运动轨迹 m-m 的延长线与回转中心 A 之间存在偏距 e,则称为偏置曲柄滑块机构。
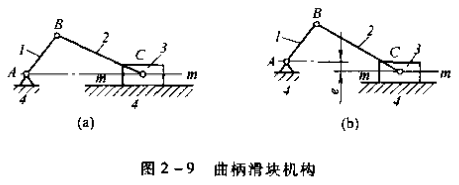
一般应用在活塞式内燃机、空气压缩机、冲床等机械中。
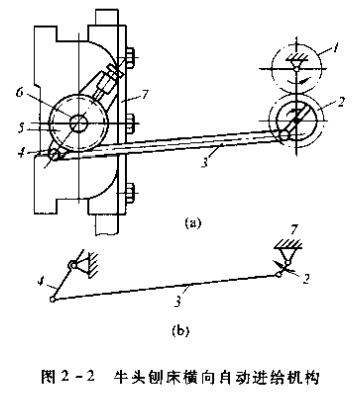
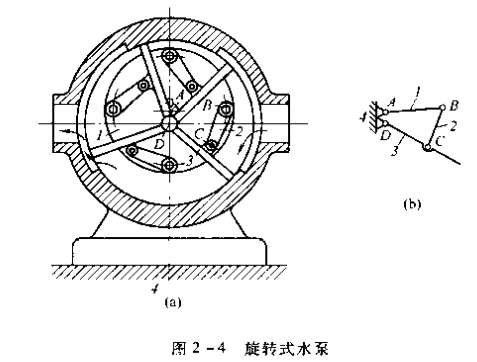
导杆机构
导杆机构可看做是改变曲柄滑块机构中的固定构件而演化来的。
如下图 a 取 1 为固定构件即为导杆机构(图 b)。 4 称为导杆,3 相对导杆华东并一起绕 A 点转动,通常取 2 为原动件。
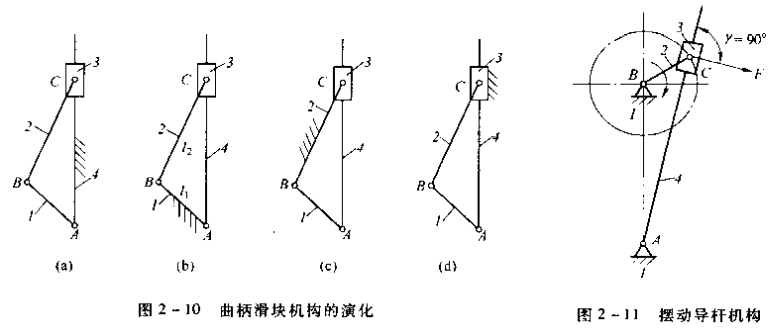
一般应用在牛头刨床、插床和回转式油泵中。
摇块机构和定块机构
图 2-10 a 中取 2 为固定构件,可得 2-10 c 所示摆动滑块机构,或称摇块机构。
主要应用在摆缸式内燃机和液压驱动装置中。
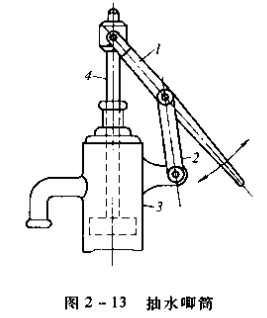
图 2-10 a 中取 3 为固定构件,可得 2-10 d 所示固定滑块机构,或称定块机构。
一般用于抽水唧筒和抽油泵中。
含两个移动副的四杆机构
含有两个移动副的四杆机构常称为双滑块机构。
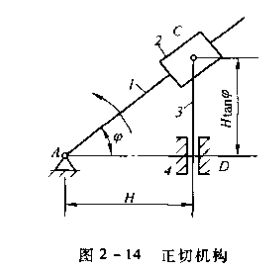
正切机构
两个移动副不相邻,从动件 3 的位移与原动件转角 \phi 的正切成正比。
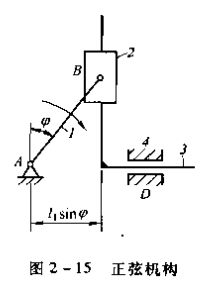
正弦机构
两个移动副相邻,且其中一个移动副与机架相关联,从动件 3 的位移与原动件转角 \phi 的正弦成正比。
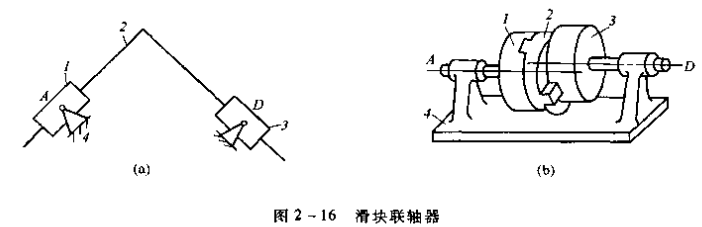
滑块联轴器
两个移动副相邻,且均不与机架相关联,主动件 1 与从动件 3 具有相等的角速度,图示滑块联轴器就是这种机构的应用实例,它可用来连接中心线平行但不重合的两根轴。
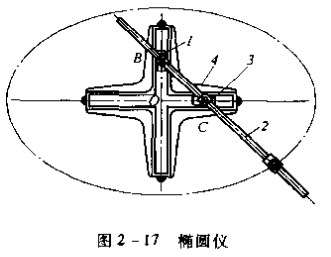
椭圆仪
两个移动副都与机架相关联,图所示椭圆仪就用到这种机构,当滑块 1 和 3 沿机架的十字槽滑动时,连杆 2 上的各点便描绘出长短经不同的椭圆。
具有偏心轮的四杆机构
a 所示机构,杆 l 为圆盘,几何中心为 B。因运动时圆盘绕偏心 A 转动,故称偏心轮。A、B 之间的距离 e 称为偏心距。
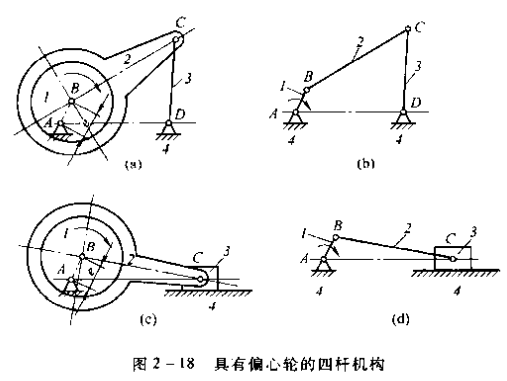
当曲柄长度很小时,通常都把曲柄做成偏心轮,这样不仅增大了轴颈的尺寸,提高偏心轴的强度和刚度,而且当轴颈位于中部时,还可安装整体式连杆,使结构简化。因此,偏心轮广泛应用于传力较大的剪床、冲床、颚式破碎机、内燃机等机械中。
四杆机构的扩展
除上述以外,生活中常见的某些多杆机构,也可以看成是由若干个四杆机构组合扩展形成的。
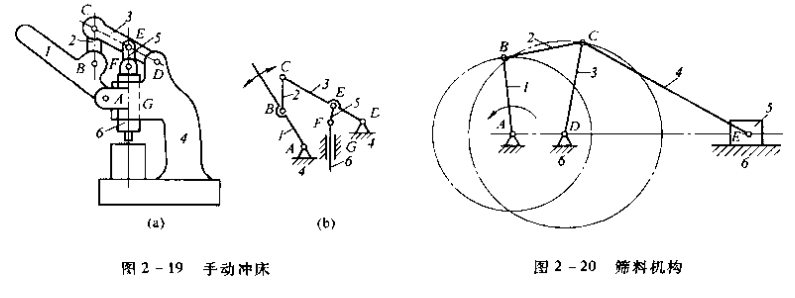
图 2-19 所示的手动冲床是一个六杆机构。它可以看成是由两个四杆机构组成的。第一个是由原动摇杆(手柄)1、连杆 2、从动摇杆 3 和机架 4 组成的双摇杆机构;第二个是由摇杆 3、小连杆 5、冲杆 6 和机架 4 组成的摇杆滑块机构。其中钱一个四杆机构的输出件被作为第二个四杆机构的输入件。扳动手柄 1,冲杆 6 就上下运动。采用六杆机构,使扳动手柄的力获得两次放大,从而增大了冲杆的作用力。这种增力作用在连杆机构中经常用到。
图 2-20 所示为筛料机主体结构的运动简图。这个六杆机构也可以看成由两个四杆机构组成。第一个是由原动曲柄 1、连杆 2、从动曲柄 3 和机架 6 组成的双曲柄机构;第二个是由曲柄 3(原动件)、连杆 4、滑块 5(筛子)和机架 6 组成的曲柄滑块机构。
平面四杆机构的基本特性
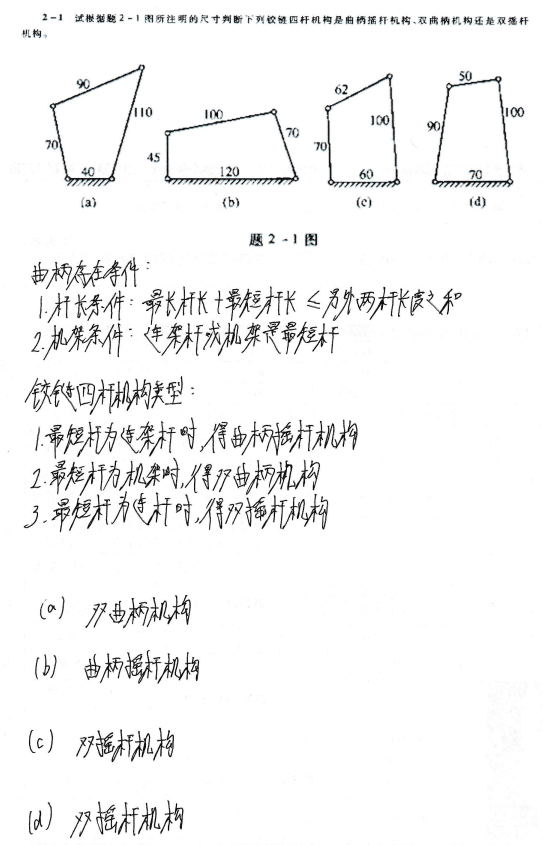
铰链四杆机构有整转副的条件
- 最短杆和最长杆长度之和小于等于其余两杆长度之和
- 整转副是由最短杆与其邻边组成的
曲柄是连架杆,整转副处于机架上才能形成曲柄,因此整转副的铰链四杆机构是否存在曲柄,还应根据选择哪一个杆为机架来判断:
- 取最短杆为机架时,机架上有两个整转副,得双曲柄机构
- 取最短杆的邻边为机架时,机架上只有一个整转副,得曲柄摇杆机构
- 取最短杆的对边为机架时,机架上没有整转副,故得双摇杆机构。(这种具有整转副而没有曲柄的铰链四杆机构常用作电风扇的摇头机构)
急回特性
下图为一曲柄摇杆机构,其曲柄 AB 在转动一周的过程中,有两次与连杆 BC 共线。在这两个位置铰链中心 A 与 C 之间的距离 AC_1 和 AC_2 分别为最短和最长,因而摇杆 CD 的位置 C_1D 和 C_2D 分别为其左右极限位置。摇杆在两极限位置间的夹角 \psi 称为摇杆的摆角。
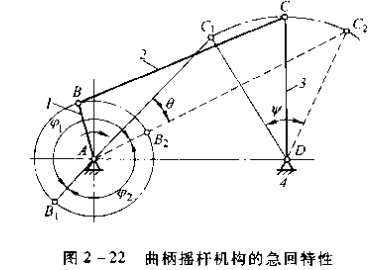
当曲柄由位置 AB_1 顺时针转到位置 AB_2 时,曲柄转角 \phi_1=180°+\theta,其中 \theta=∠C_1AC_2,这时摇杆由左极限位置 C_1D 摆到右极限位置 C_2D,摇杆摆角为 \psi;而当曲柄顺时针再转过角度 \phi_2=180°-\theta 时,摇杆由位置 C_2D 摆回到 C_1D,其摆角仍然是 \psi。
虽然摇杆来回摆动的摆角相同,但对应的曲柄转角不等(\phi_1>\phi_2);当曲柄匀速转动时,对应的时间也不等(t_1>t_2),从而反映了摇杆往复摆动的快慢不同。令摇杆自 C_1D 摆至 C_2D 为工作行程,这时摇杆 CD 的平均角速度是 \omega_1=\frac{\psi}{t_1};摇杆自 C_2D 摆回至 C_1D 是其空回行程,这时摇杆的平均角速度是 \omega_2=\frac{\psi}{t_2},显然 \omega_1<\omega_2,它表明摇杆具有急回运动的特性。
牛头刨床、往复式输送机等机械就利用这种急回特性来缩短非生产时间,提高生产率。
急回运动特性可用行程速度变化系数(或称行程速比系数)K 表示,即
K=\frac{\omega_1}{\omega_2}=\frac{\frac{\psi}{t_2}}{\frac{\psi}{t_1}}=\frac{\phi_1}{\phi_2}=\frac{180°+\theta}{180°-\theta}
或
\theta=180°\frac{K-1}{K+1}
上式表面,\theta 和 K 之间存在一一对应关系,因此机构的急回特性也可用 \theta 角来表征。由于 \theta=∠C_1AC_2,它与从动件极限位置对应的曲柄位置有关,故称 \theta 为极位夹角。显然,\theta 越大,K 越大,急回运动的特性也越显著。
具有机会特性的的四杆机构除曲柄摇杆机构外,还有偏执曲柄滑块机构(图 2-9 b)和摆动导杆机构(图 2-11)等。
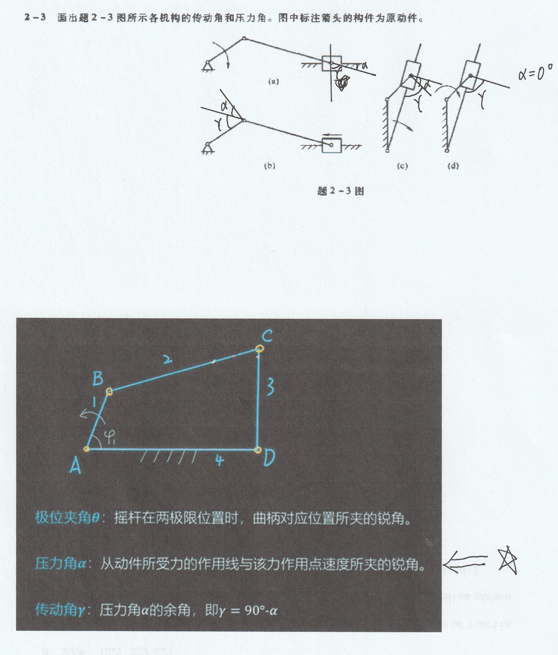
压力角与传动角
在生产中,不仅要求连杆机构能实现预定的运动规律,而且希望运转轻便,效率较高。图 2-23 a 所示的曲柄摇杆机构,如不计各杆质量和运动副的摩擦,则连杆 BC 为二力杆,它作用于从动摇杆 3 上的力 F 沿 BC 方向的。作用在从动件上的驱动力 F 与该力作用点绝对速度 V_c 之间所夹的锐角 \alpha 称为压力角。由图可见,力 F 在 V_c 方向的有效分力为 F'=Fcos\alpha,即压力角越小,有效分力就越大。也就是说,压力角可作为判断机构传动性能的标志。在连杆机构设计中,为了度量方便,习惯用压力角 \alpha 的余角 \gamma(即连杆和从动摇杆之间所夹的锐角)来判断传力性能,\gamma 称为传动角。因 \gamma=90°-\alpha,所以 \alpha 越小,\gamma 越大,机构传力性能越好。
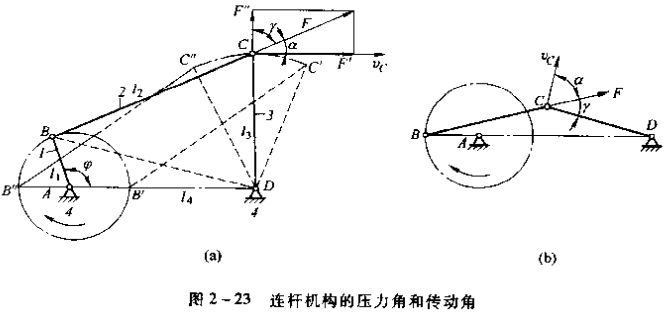
机构运转时,传动角是变化的,为了保证机构正常工作,必须规定最小传动角 \gamma_{min}
,对于一般机械,通常取 \gamma_{min}\ge40°;对于颚式破碎机、冲床等大功率机械,最小传动角应取更大一些,可取 \gamma_{min}\ge50°;对于小功率控制机构和仪表,\gamma_{min} 可略小于 40°。
图 2-23 a 中:
cos∠BCD=\frac{l_2^2+l_3^2-l_1^2-l_4^2+2l_1l_4cos\phi}{2l_2l_3}
当 \phi=0° 时,得∠BCD_{min};当 \phi=180° 时,得∠BCD_{max}。
校核压力角时,算出 ∠BCD_{min} 和 ∠BCD_{max},再代入下面计算
\gamma=
\begin{cases}
∠BCD &(∠BCD 为锐角时)\\
180°-∠BCD &(∠BCD 为钝角时)
\end{cases}求出两个 \gamma,其中较小的一个即为该机构的 \gamma_{min}。
死点位置
对于图 2-24 所示的曲柄摇杆机构,如以摇杆 3 为原动件,而曲柄 l 为从动件,则当摇杆摆到极限位置 C_1D 和 C_2D 时,连杆 2 和曲柄 1 共线,从动件的传动角 \gamma=0°。若不计各杆的质量,则此时连杆加给曲柄的力将经过铰链中心 A,此力对点 A 不产生力矩,因此不能使曲柄转动。机构的这种传动角为 0 的位置称为死点位置。四点位置会使机构的从动件出现卡死或运动不确定现象。为了消除死点位置的不良影响,可以对从动曲柄施加外力,或利用飞轮及构件自身的惯性作用,使机构通过死点位置。
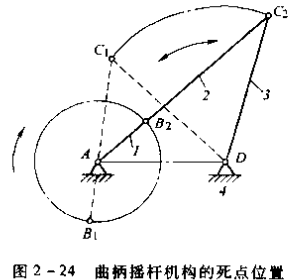
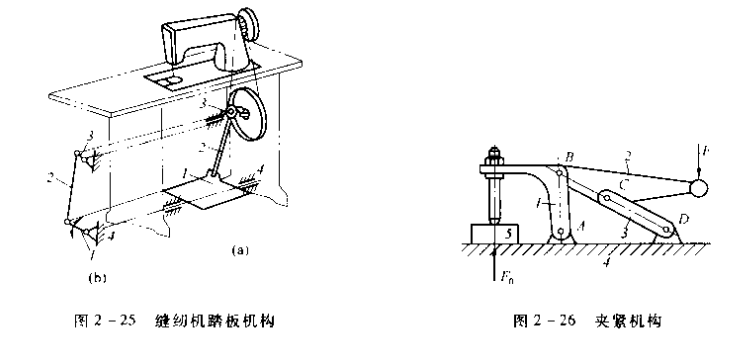
图 2-25 a 所示为缝纫机的踏板机构运动简图。踏板 1(原动件)往复摆动,通过连杆 2 驱使曲柄 3(从动件)作整周转动,再经过带传动使机头主轴转动。在实际使用中,缝纫机有时会出现踏不动或倒车现象,这就是由于机构处于死点位置引起的。在正常运转时,借助安装在机头主轴上的飞轮(即上带轮)的惯性作用,可以使缝纫机踏板机构的曲柄冲过死点位置。
死点位置对传动虽然不利,但是对某些夹紧装置却可用于防松。如图 2-26 所示的铰链四杆机构,当工件 5 被夹紧时,铰链中心 B、C、D 共线,工件加在杆 l 上的反作用力 F_n 无论多大,也不能使杆 3 转动。这就保证在去掉外力 F 之后,仍能可靠地夹紧工件。当需要取出工件时,只需向上扳动手柄,即能松开夹具。
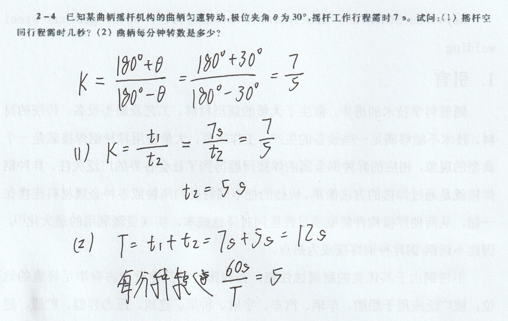
例题
参考
杨可桢 机械设计基础 第五版 高等教育出版社 2006