最近更新于 2025-05-11 20:43
运动副
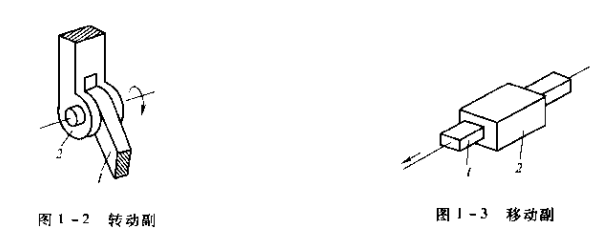
低副
像下面通过面接触组成运动副的就是低副
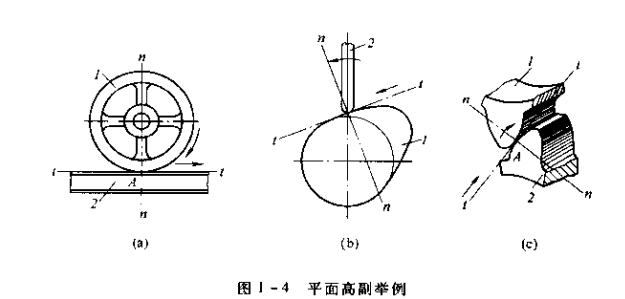
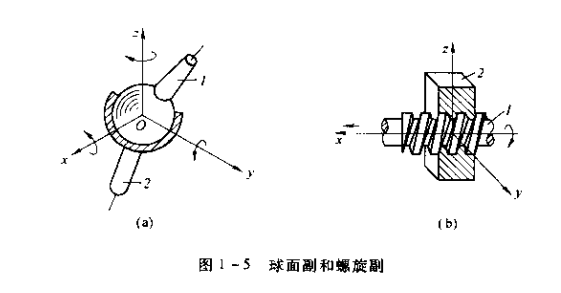
高副
像下面通过点或线接触组成运动副的就是高副
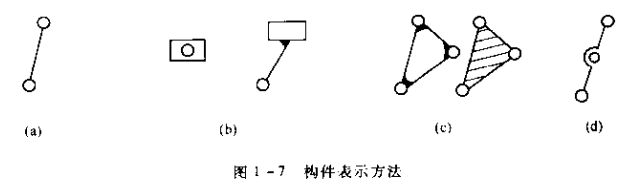
平面机构简图
如(a)中圆圈代表转动副,1 和 2 两构建都是活动件;(b)中 2 画有阴影线,代表为机架(非活动件)
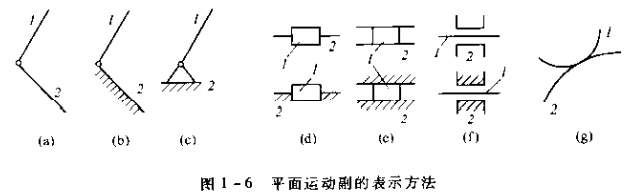
当两构件之间固定时,可以加上焊接符号
机构中构件可以分为三类:
- 固定构件(机架):用来支持活动构件的构件(上面图中加阴影线的构件)
- 原动件(主动件):外界向它输入运动,也叫输入构件
- 从动件:随运动件而运动的构件
自由度计算
F 为机构自由度
对于平面机构,每个活动机构可以有三个自由度,分别是 X 和 y 方向的移动以及 xOy 平面内的转动,所以有 3n,n 为活动机构数
低副会限制两个自由度,比如转动副限制两个方向的运动保留转动,移动副限制转动和一个方向的移动,所以有 -2P_L,P_L 为低副个数
高副会限制一个自由度,比如螺旋副限制了一个方向的运动,保留了旋转和一个方向的运动,所以有 P_H,P_H 为高副个数
公式:F=3n-2P_L-P_H
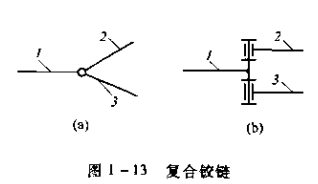
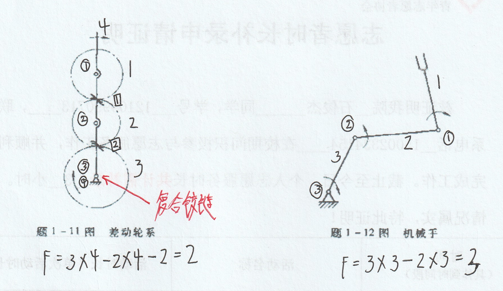
复合铰链
三个及以上构件同时在一处用转动副相连构成,K 个构件的负荷铰链有 (K-1)个转动副
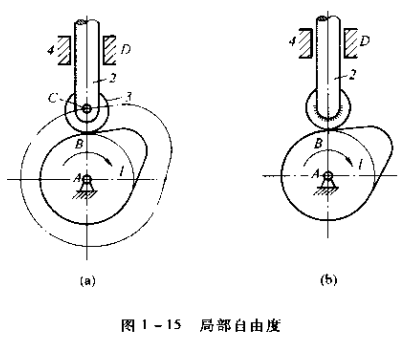
局部自由度
(a)中 1 转动通过 3 驱动 2 运动,而 3 不管是否转动都不会影响 2 的运动,3 的转动是一个局部自由度,在自由度计算中直接忽略掉。
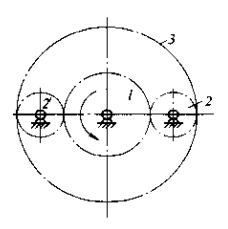
虚约束
图中将 2′ 去掉,1 转动依然可以通过 2 传递到 3,在不考虑刚度的情况下(自由度不管),它就显得可有可无了,这就是一个虚约束,计算自由度的时候直接忽略它。
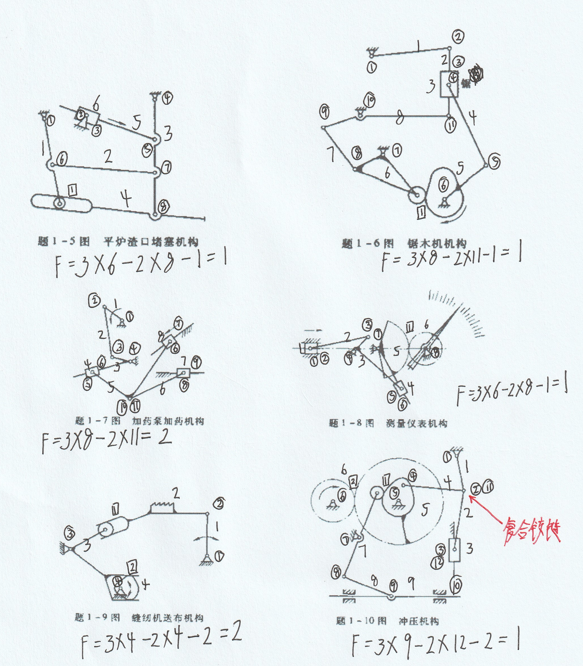
例题
下图中活动构件直接用数字标示,低副用圈数字,高副用方块数字标示。
速度瞬心
速度瞬心:互作平面相对运动的两构件上瞬时速度相等的重合点。
相对瞬心:瞬心处绝对速度不为 0。
绝对瞬心:瞬心处绝对速度为 0(某一活动构件与机架间的速度瞬心)。
瞬心的数目
K=\frac{N(N-1)}{2}
K 为瞬心数目,N 为机构中的构件数目。
瞬心位置的确定
直接观察法
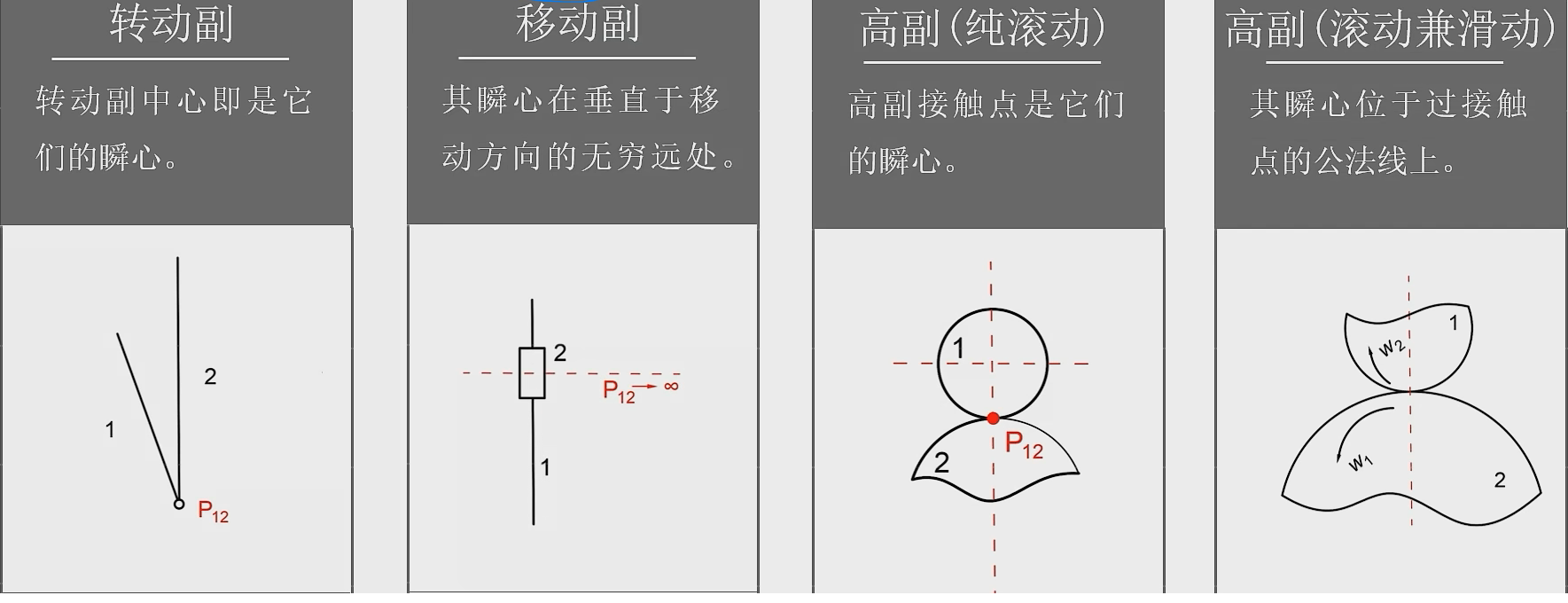
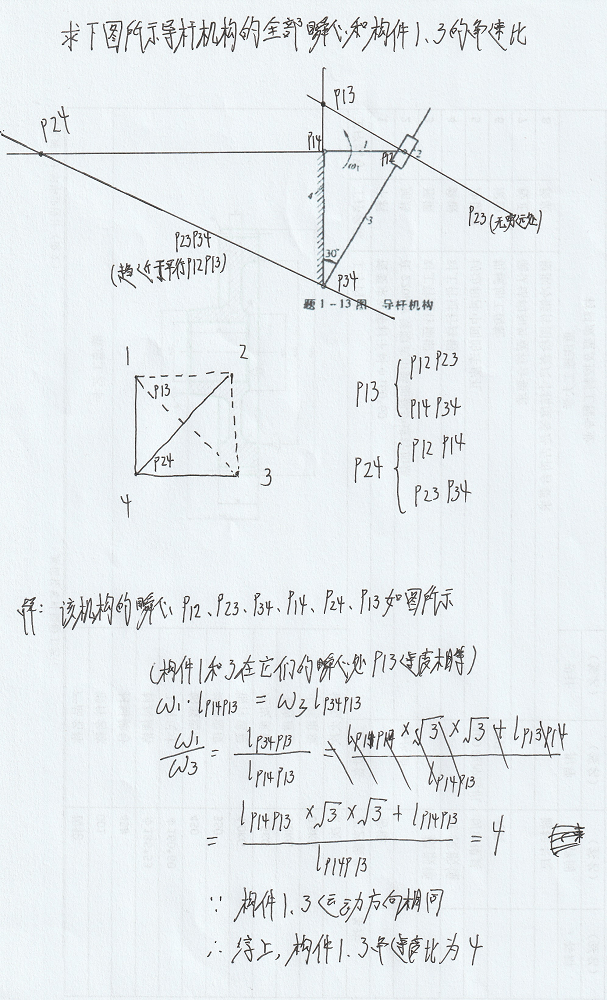
三心定理
三个彼此作平面平行运动构件的三个瞬心必在同一条直线上。
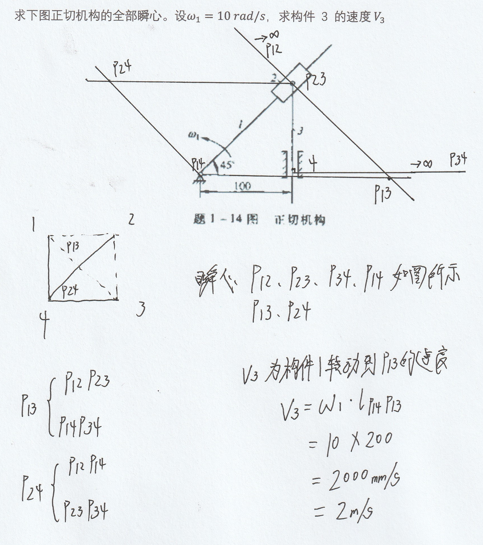
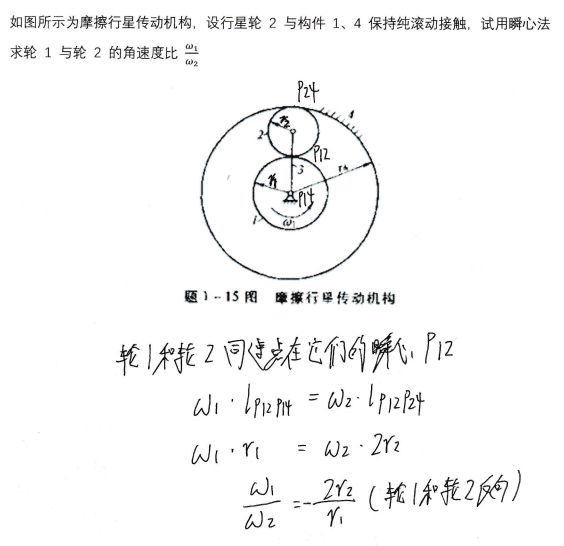
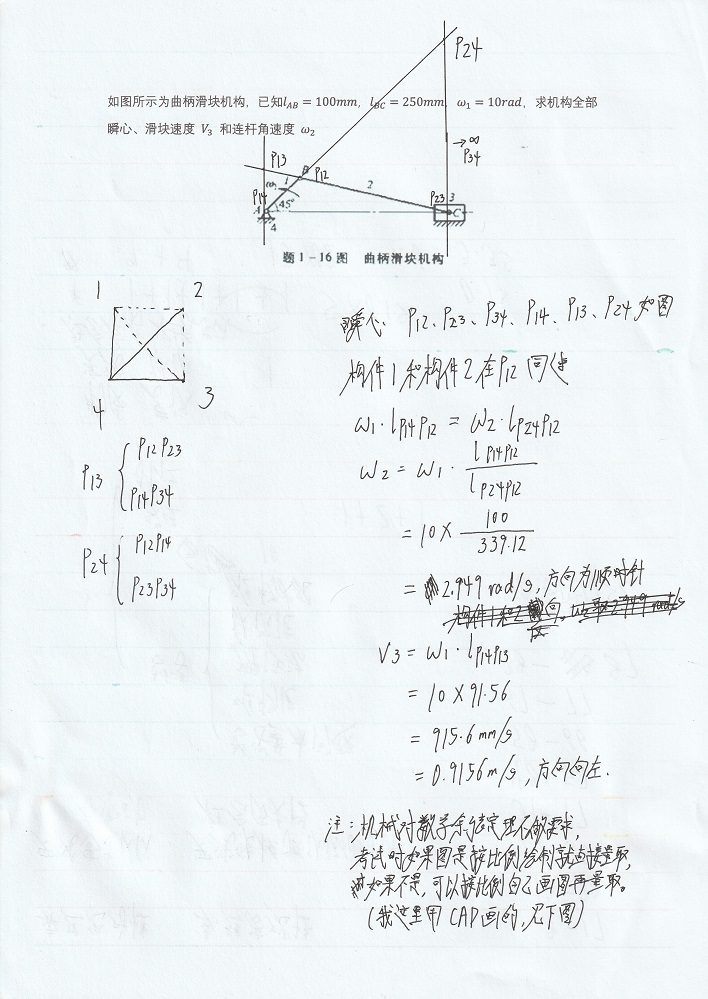
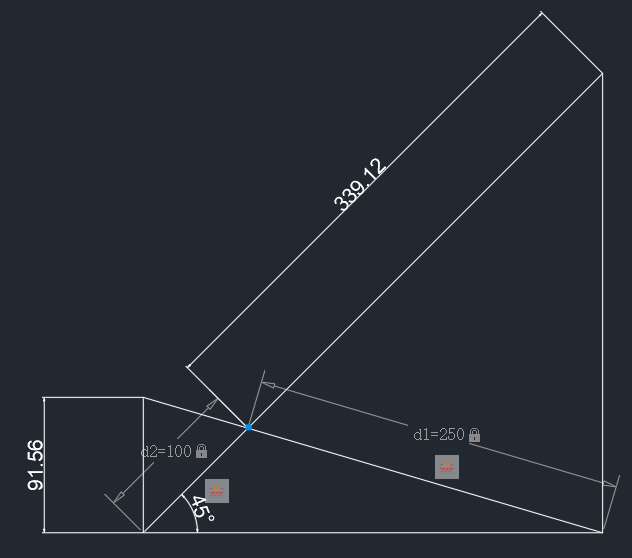
例题
参考
杨可桢 机械设计基础 第五版 高等教育出版社 2006