最近更新于 2024-05-05 14:19
关于舵机的控制方式相关说明参考:树莓派使用舵机
测试环境
Arduino UNO R3
Servo 1.18 (舵机控制库)

2 个 TS90A 舵机

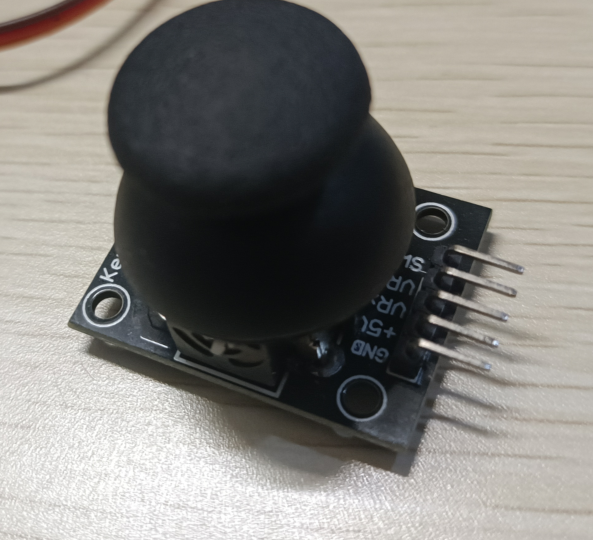
手柄
接线
GND 和 VCC 就不用提了,强调一下舵机的接线,红色为正极,棕色为 GND,黄色为信号线
手柄的 X 和 Y 分别接 Arduino 的 A0 和 A1
水平转动的舵机信号线接 2,上下转动的舵机信号线接 3
示例
#include "Servo.h"
Servo servo_x, servo_y;
void setup()
{
// 设置舵机接口
servo_x.attach(2);
servo_y.attach(3);
}
int x, y, ang_x, ang_y;
void loop()
{
// 读取手柄
x = analogRead(A0);
y = analogRead(A1);
// 角度转换
// 读取模拟值范围是 0~1023
// 对应到 0 ~ 180 度
ang_x = (int)(x * 0.175781);
servo_x.write(ang_x);
ang_y = (int)(y * 0.175781);
servo_y.write(ang_y);
}
Arduino 控制舵机云台