最近更新于 2026-02-26 23:15
使用方法
先打开模型文件
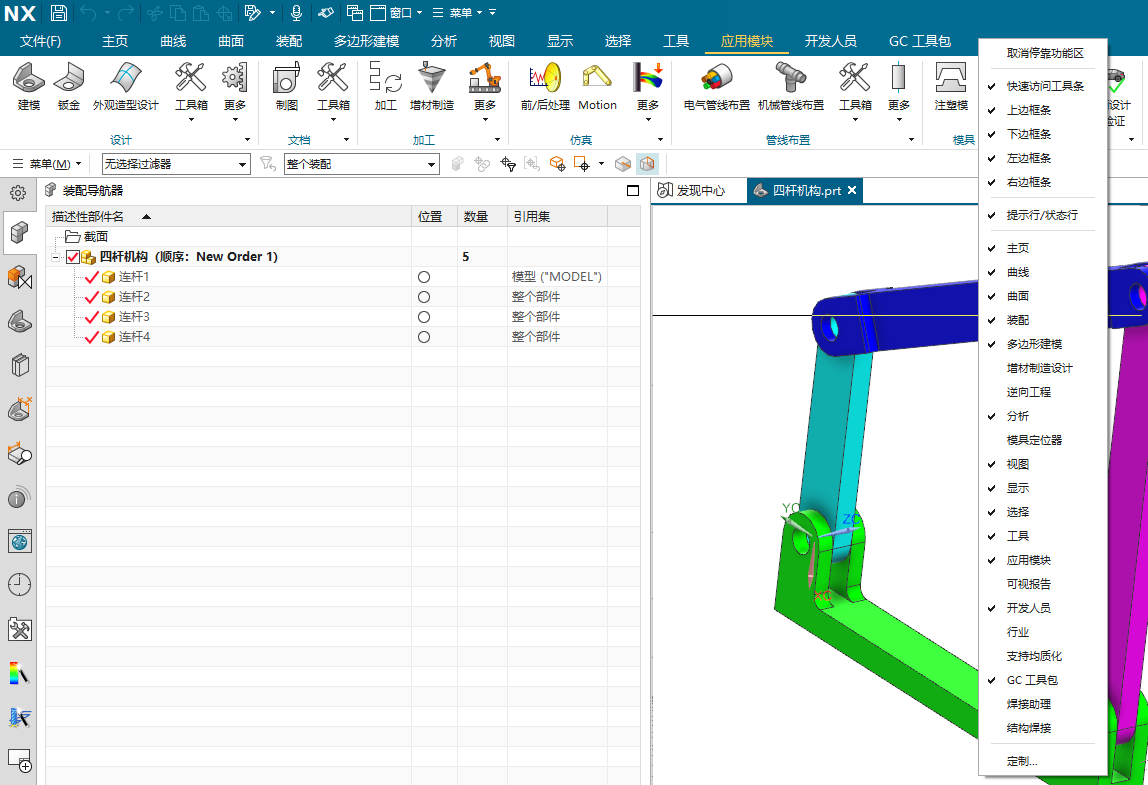
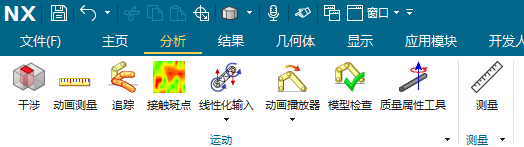
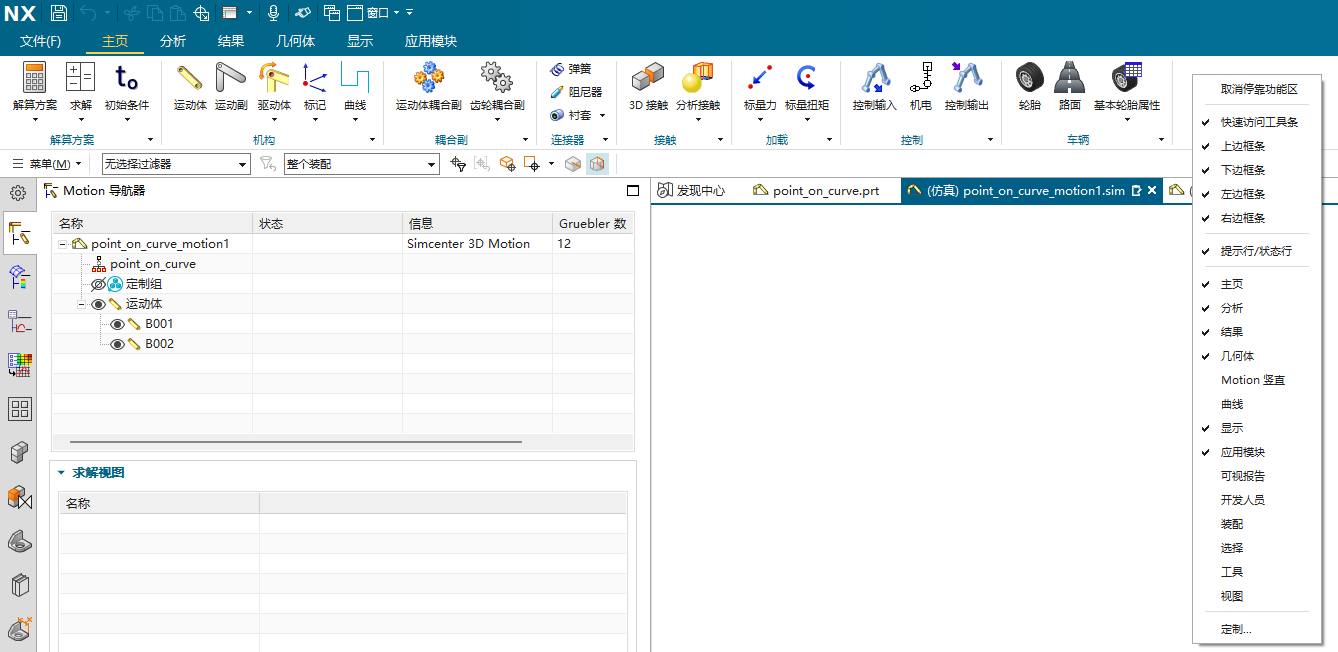
如果功能区没有应用模块,可右键勾选上。
在应用模块的仿真组,可以看到 Motion,点击打开运动仿真,或者直接使用快捷键Ctrl+Alt+K也可以打开
可以在导航器模型名称上右键新建仿真,也可以直接点击左上角新建仿真
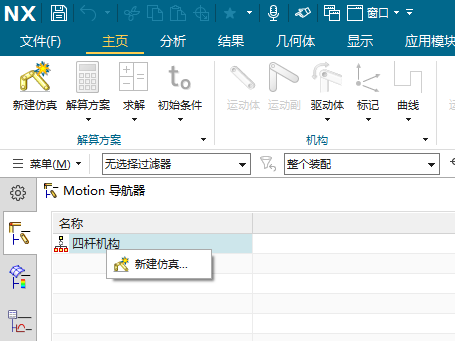
设置仿真文件名称和路径
如果模型是装配体,可以勾选基于组件的仿真,单模型中多实体不勾选;如果装配体中有约束,勾选新建仿真时启动运动副向导会提示约束转换为运动副。
模型文件
https://pan.baidu.com/s/16zDfcV-1xvg2y-IBH1c4tA?pwd=rx9p
实践操作
四杆机构
手动添加运动副方案(运动仿真完整流程)
打开四杆机构模型文件,按Ctrl+Alt+K启动仿真
新建仿真
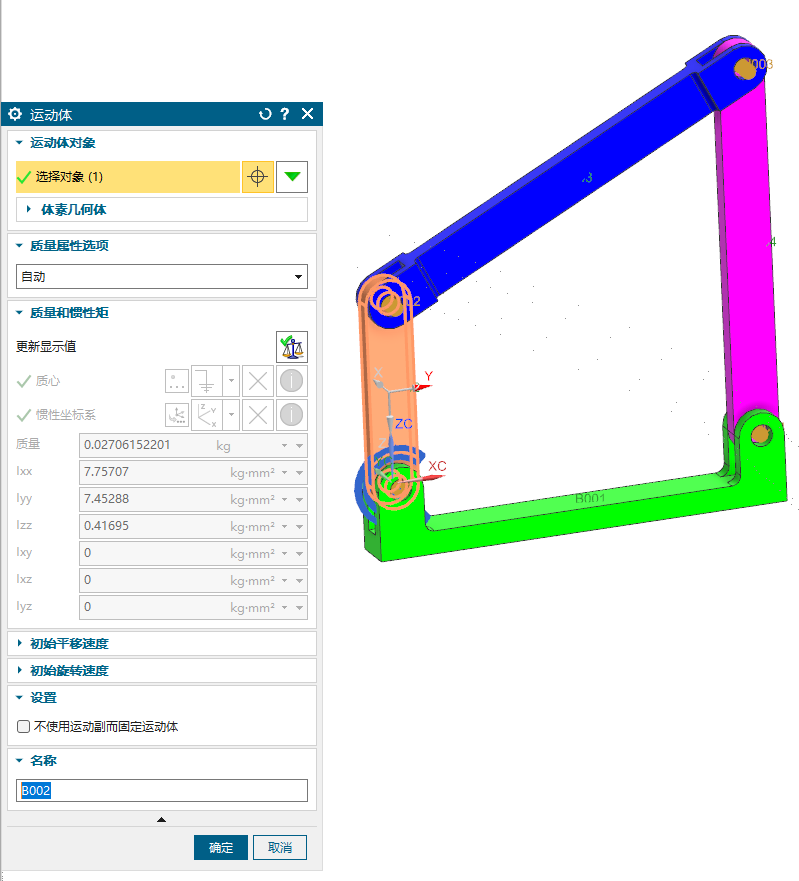
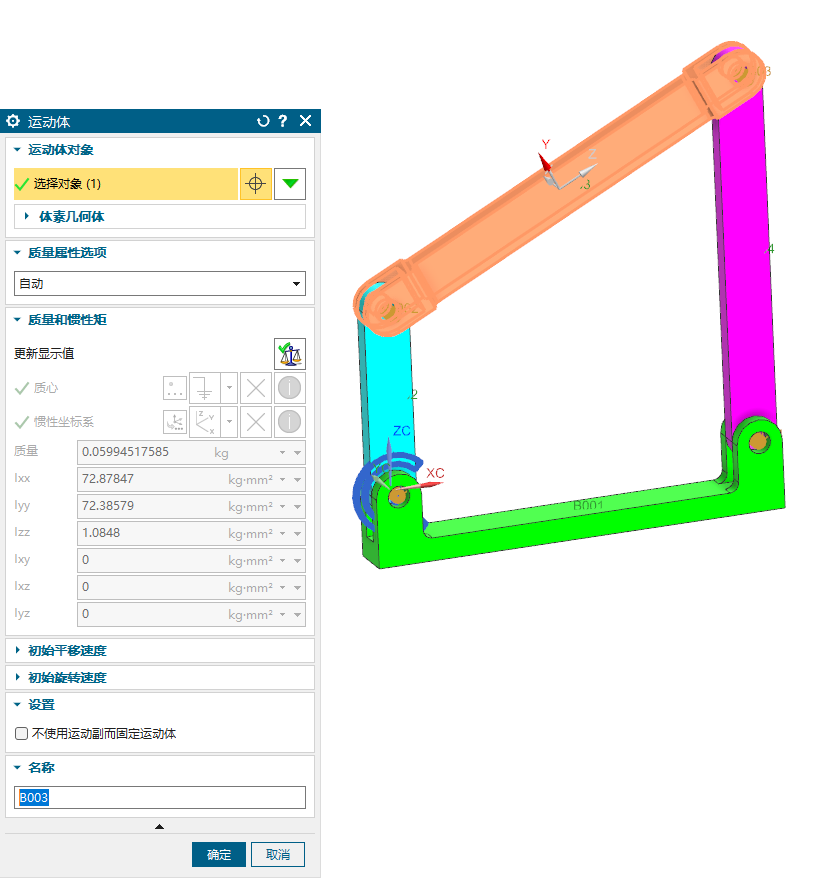
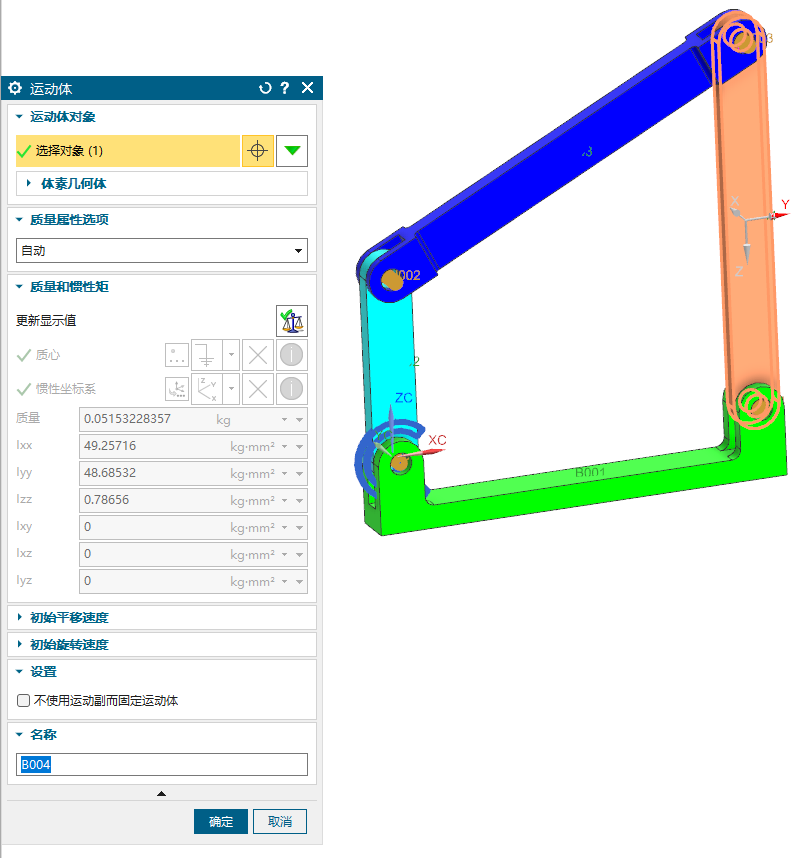
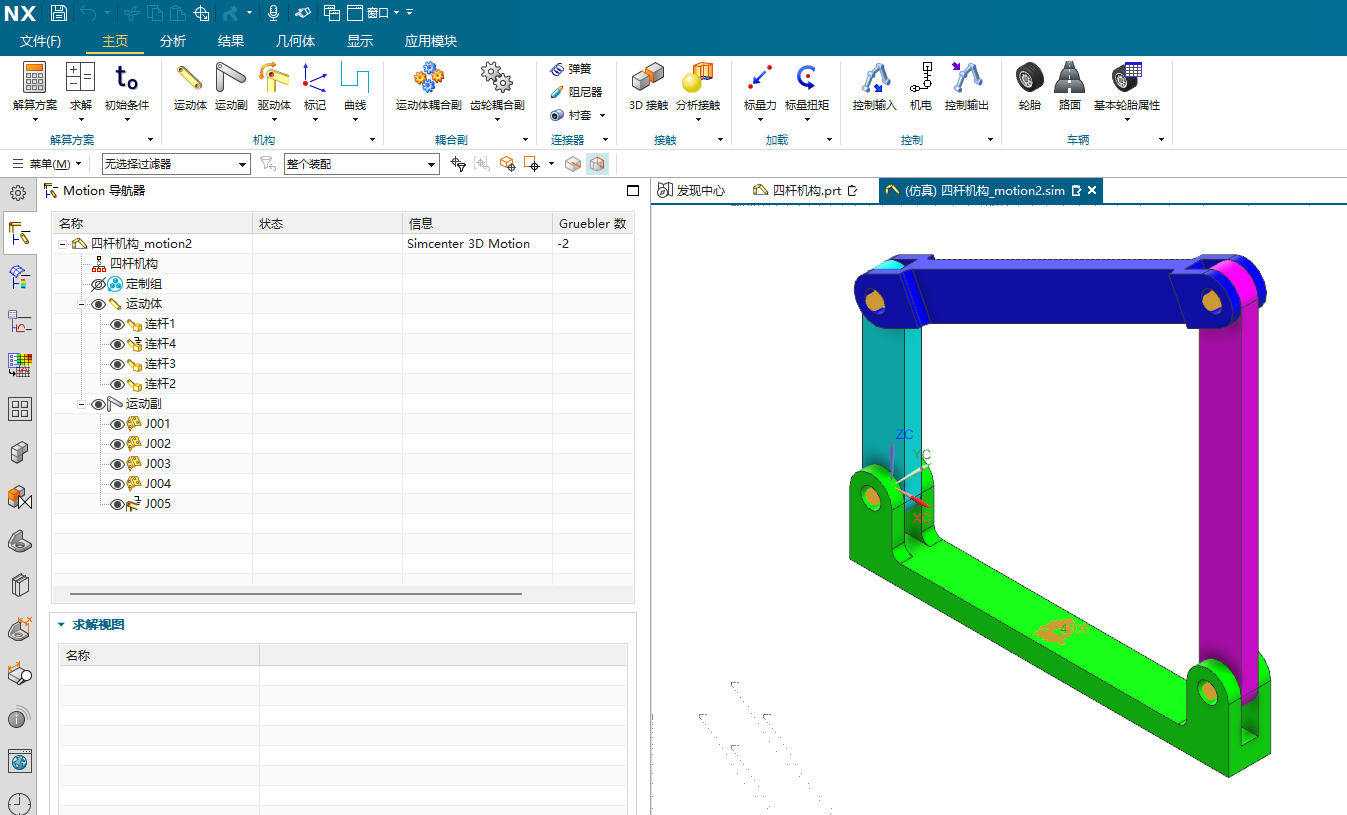
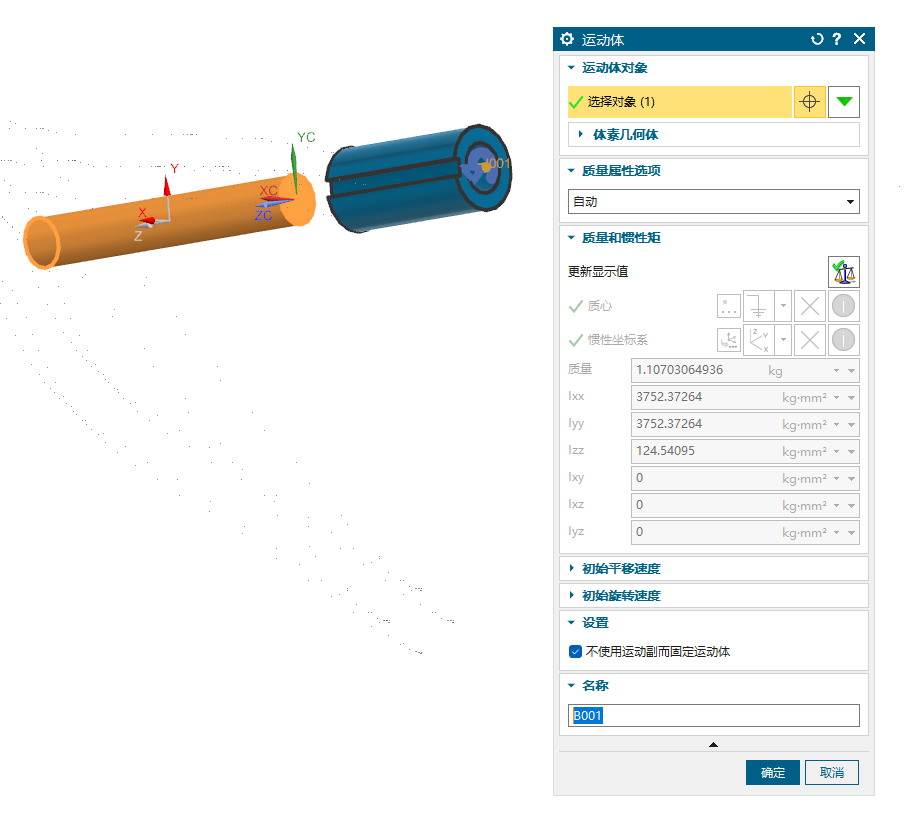
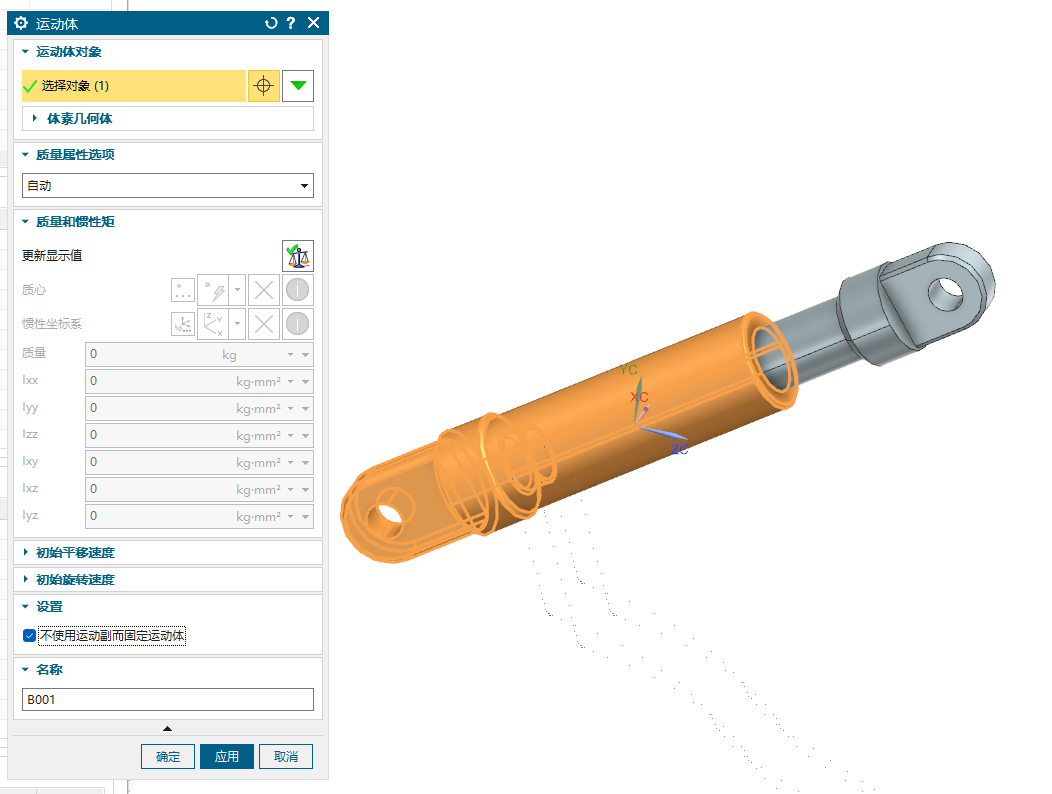
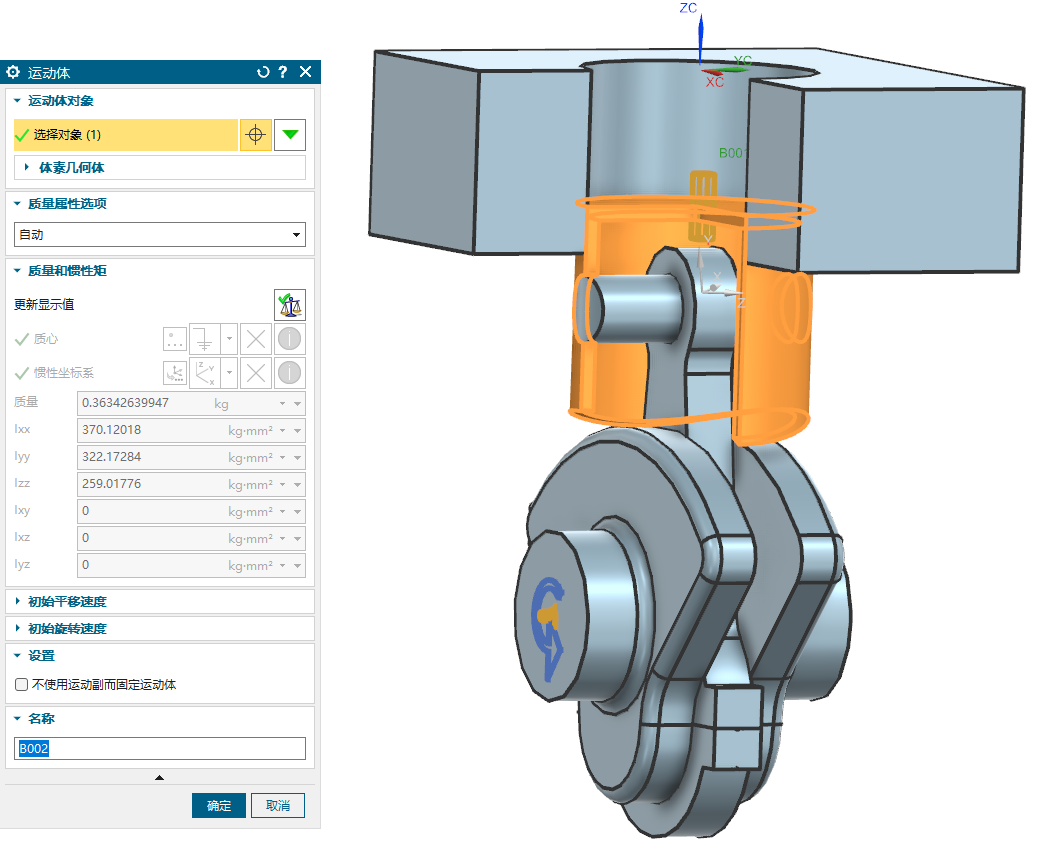
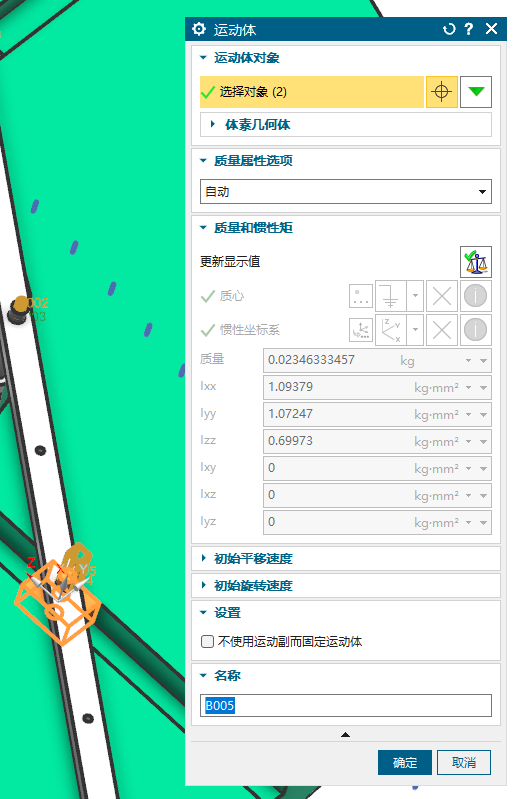
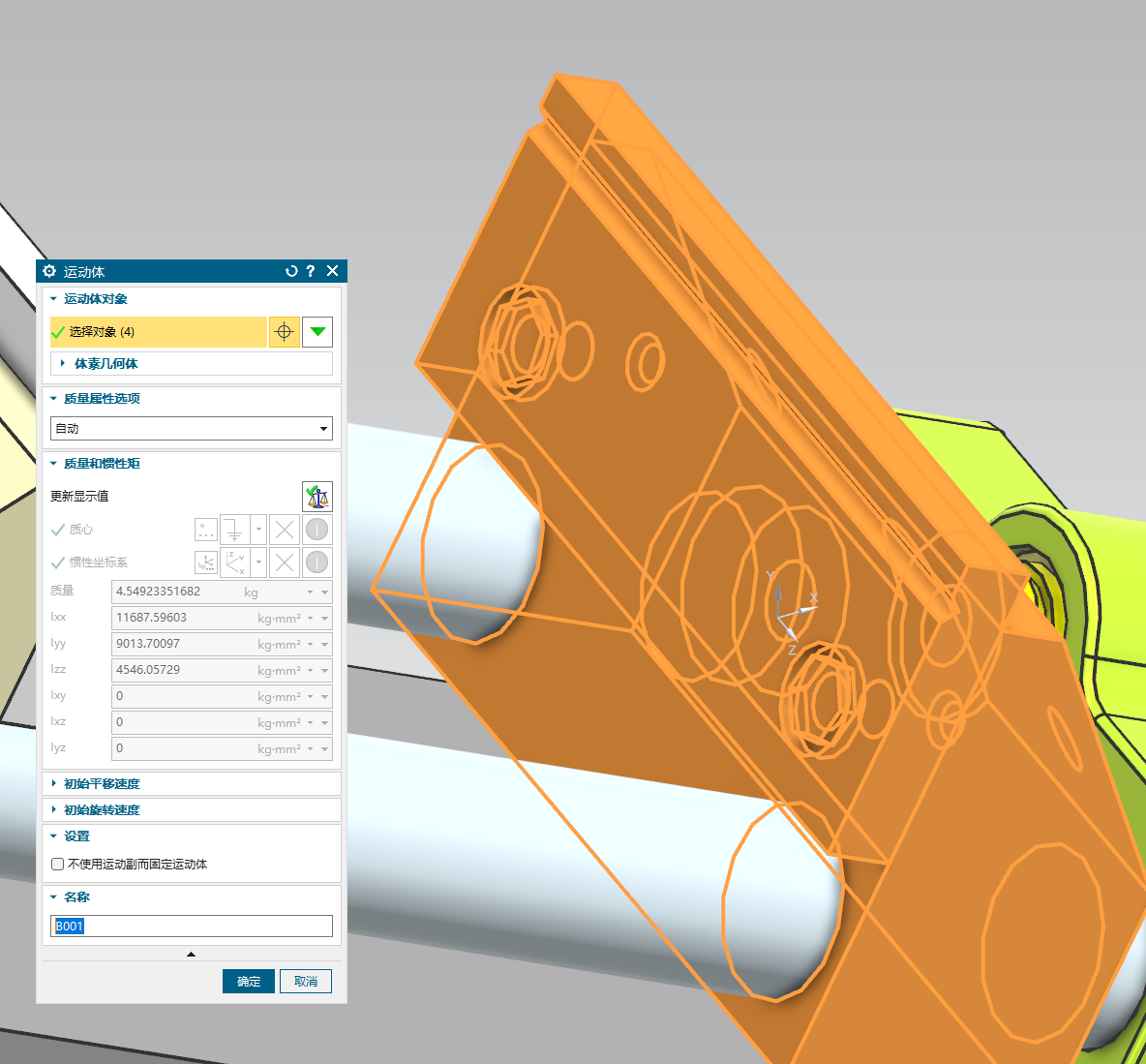
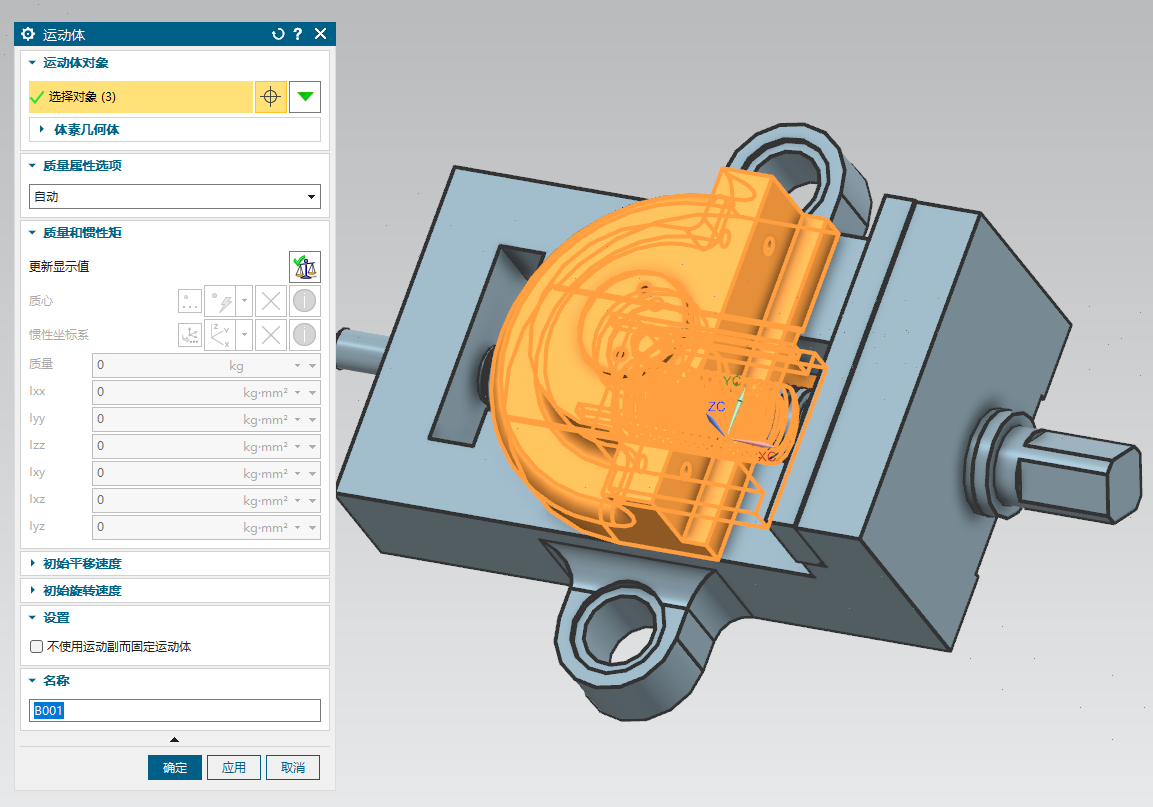
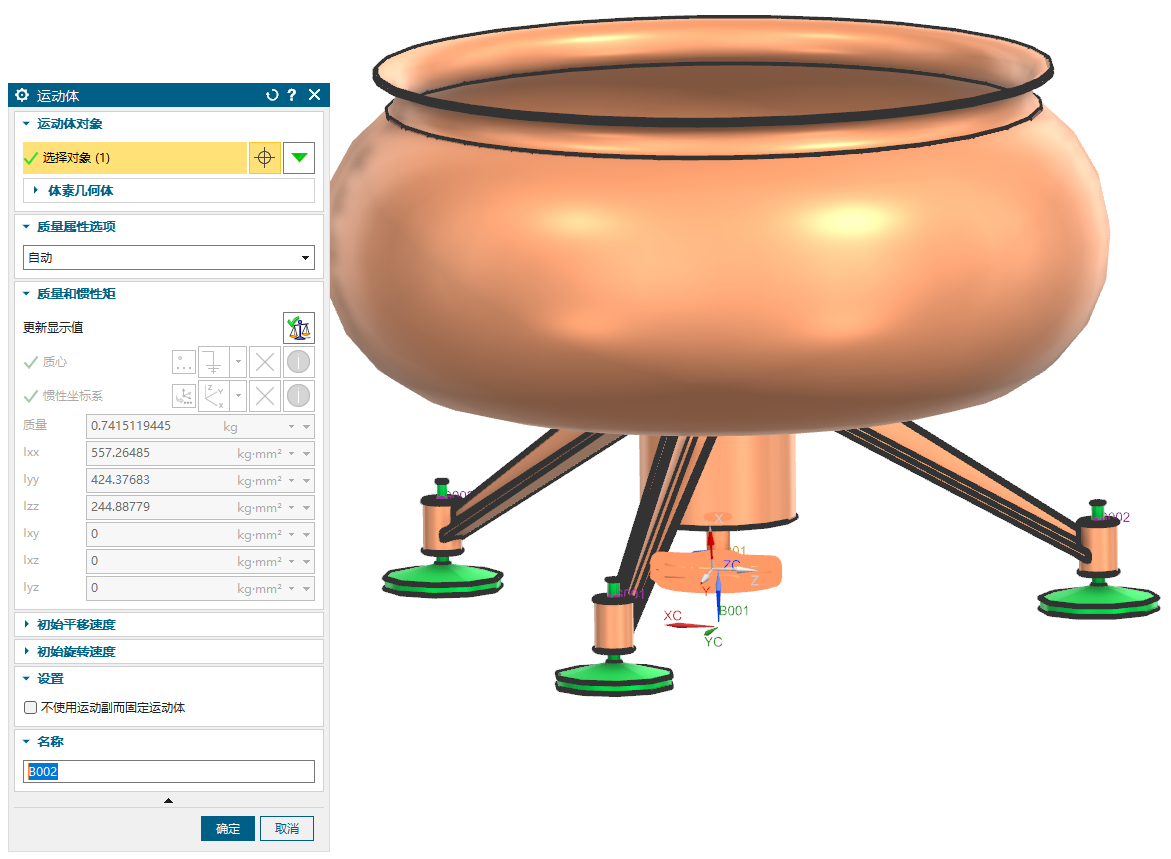
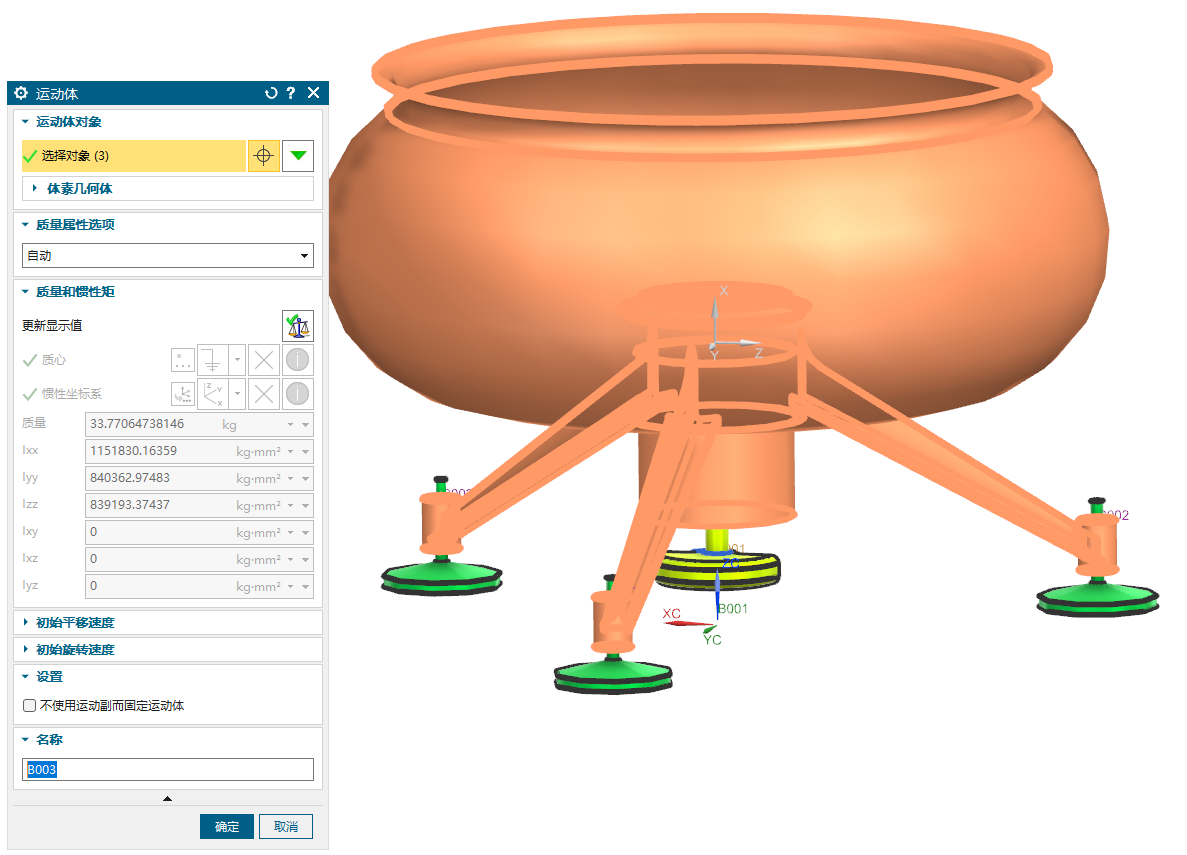
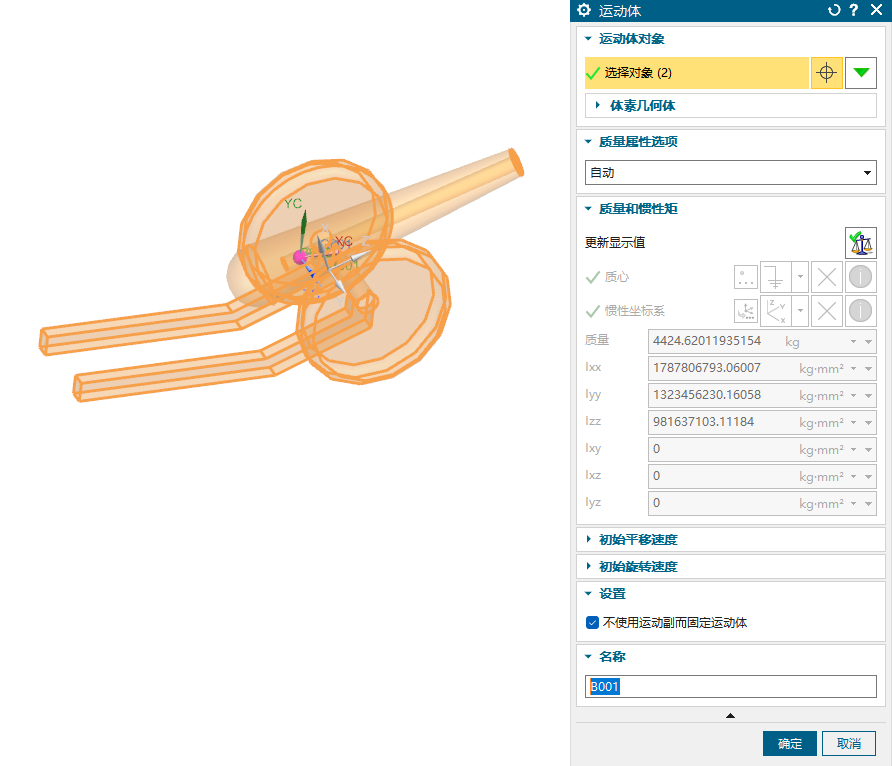
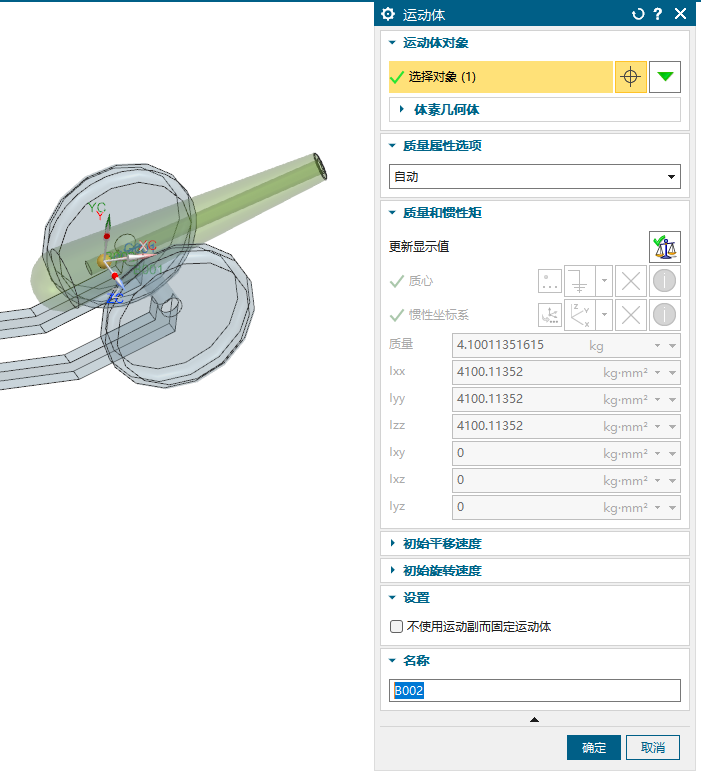
点开运动体,对于要参与运动的零件需要设置为运动体
选中底下的杆,然后可以把质量属性选项切换到自动。它作为机架,不运动,设置里勾选不适用运动副而固定运动体
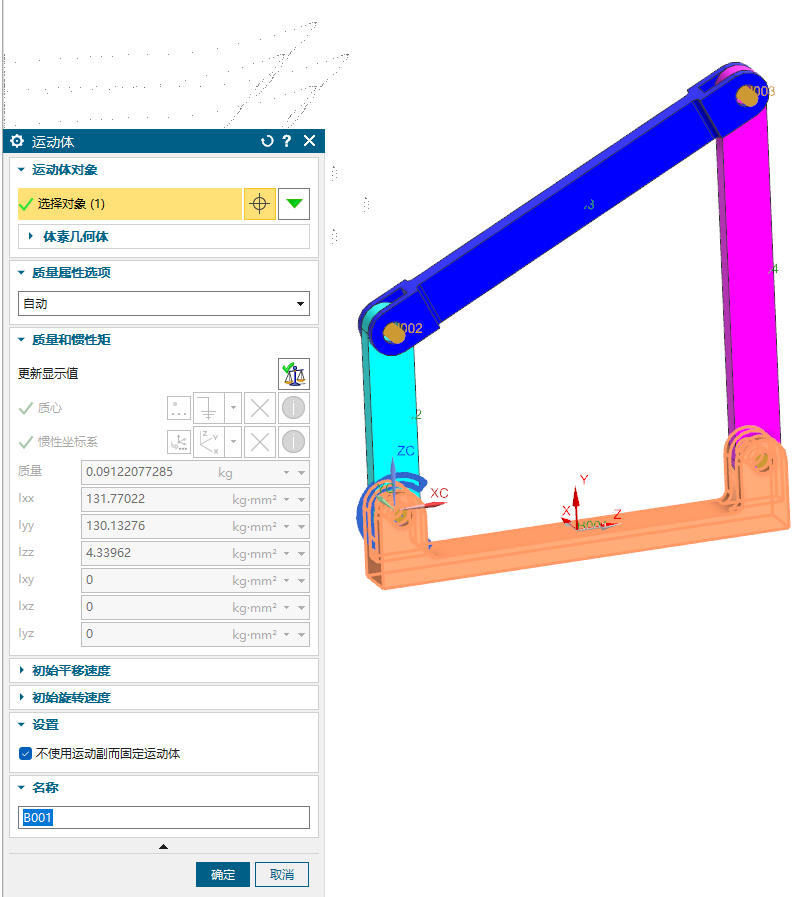
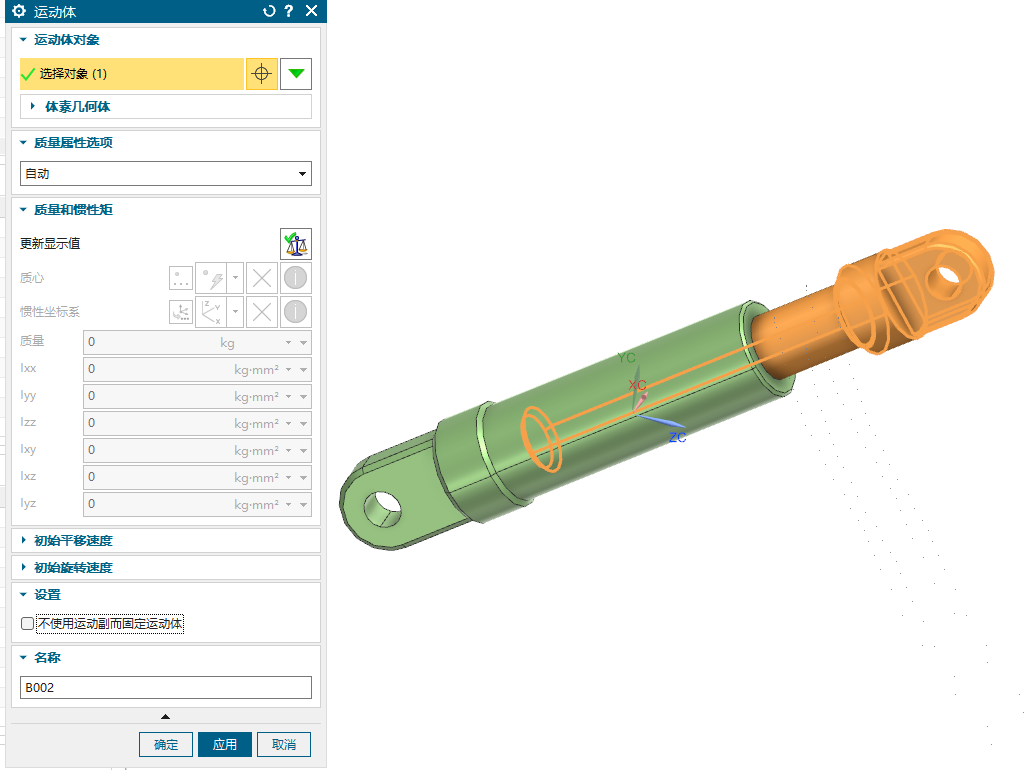
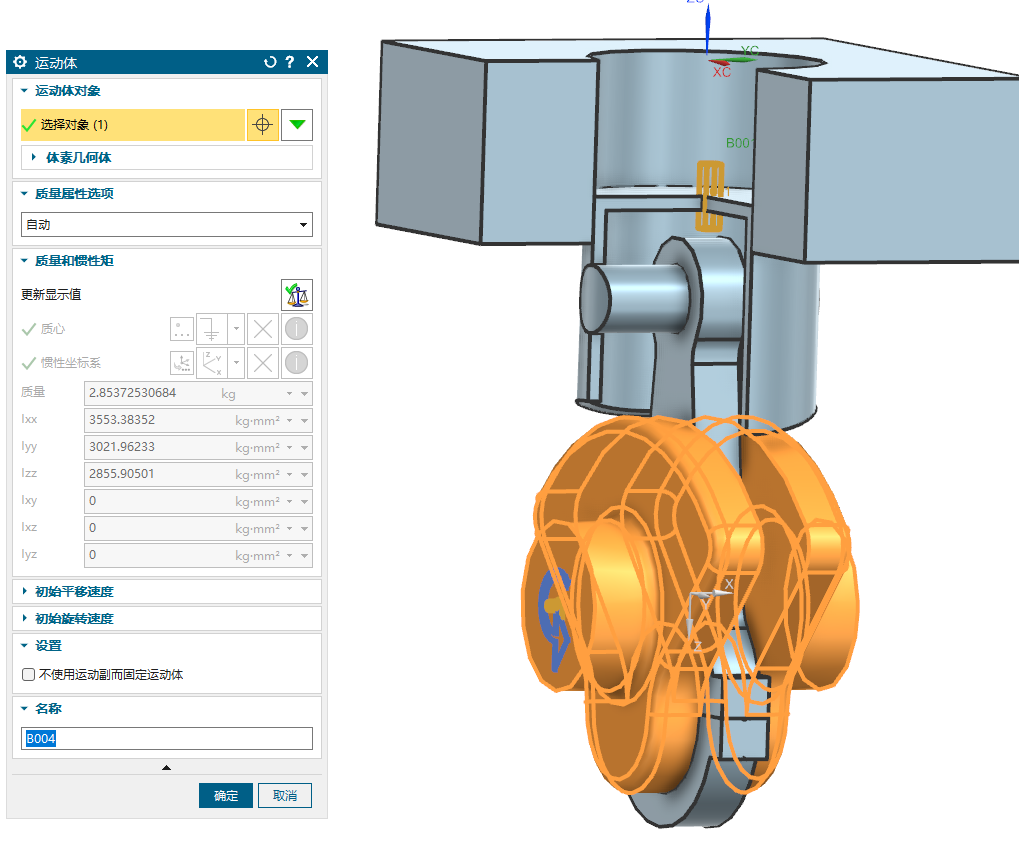
类似方式设置另外三根杆,但是它们都要运动,不勾选不适用运动副而固定运动体
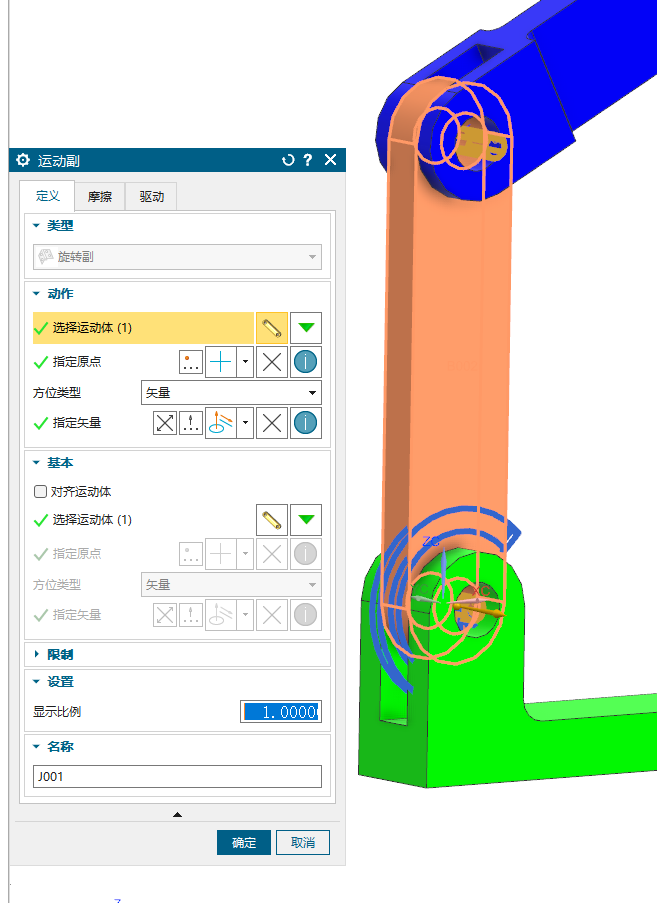
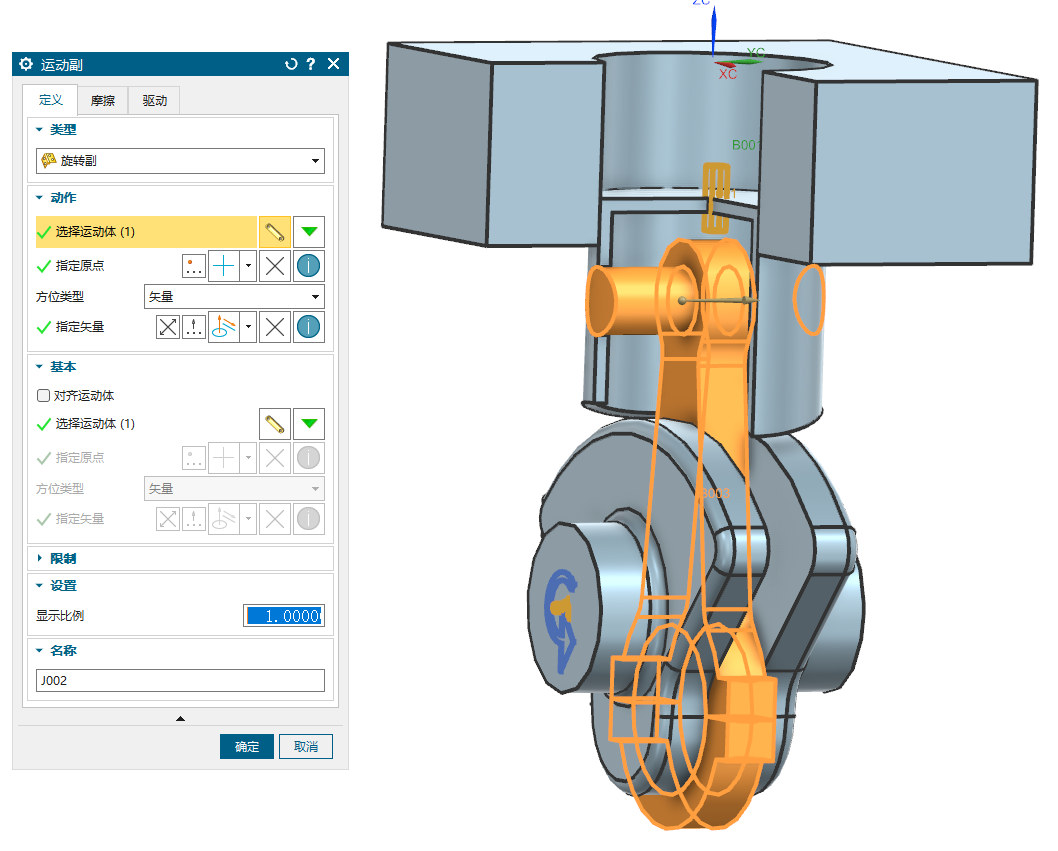
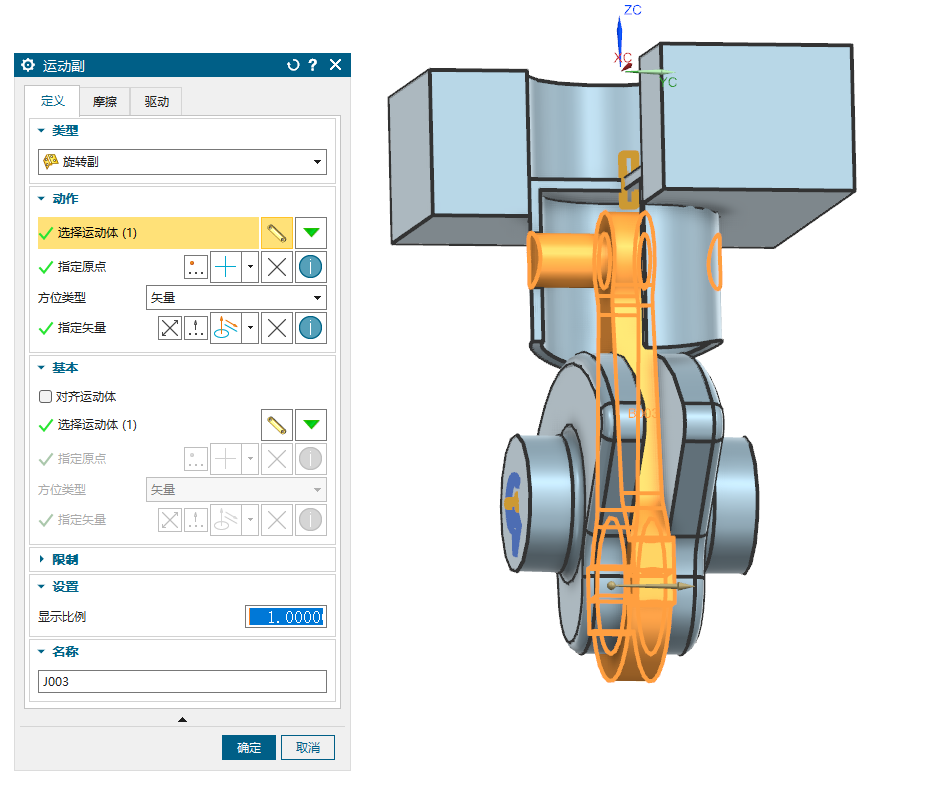
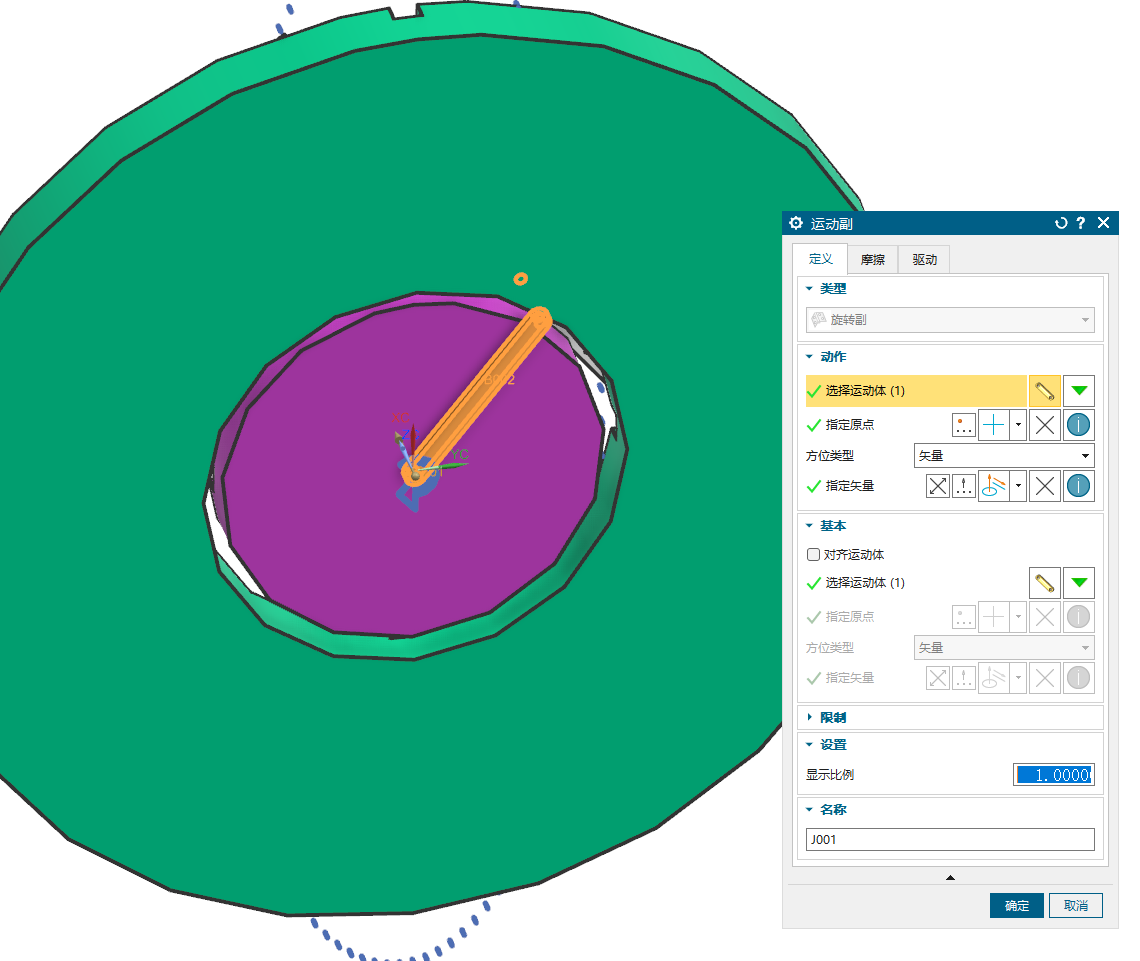
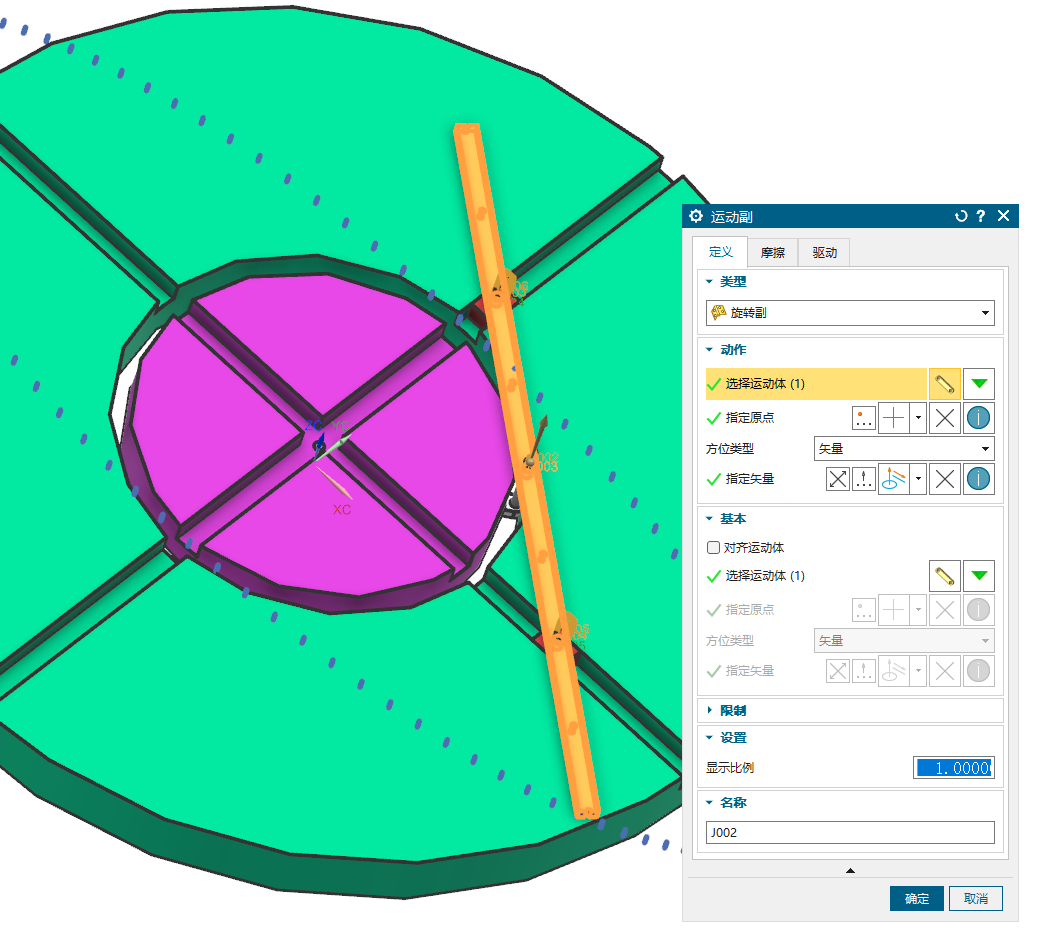
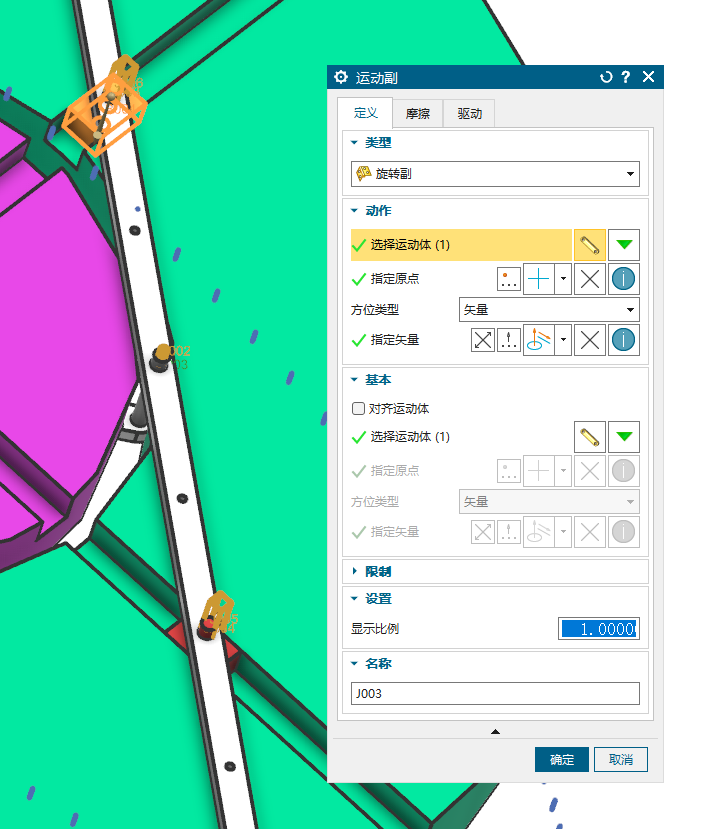
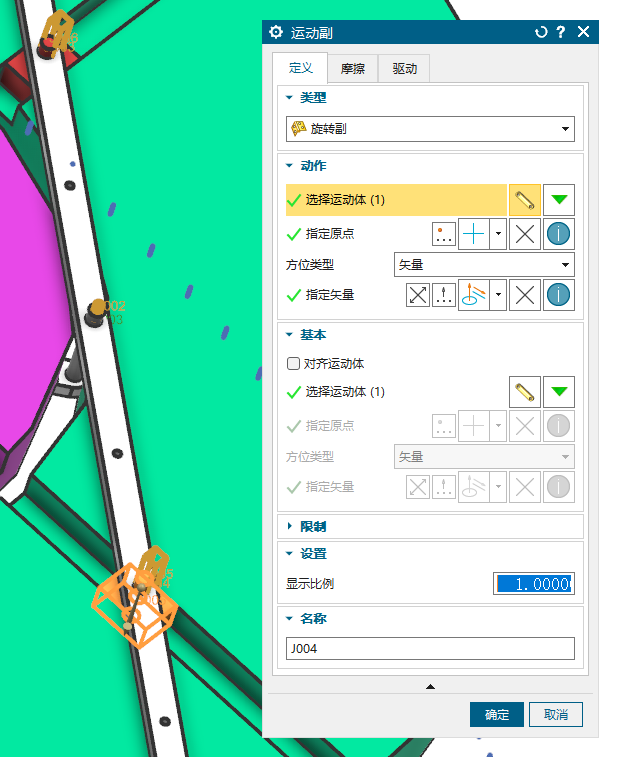
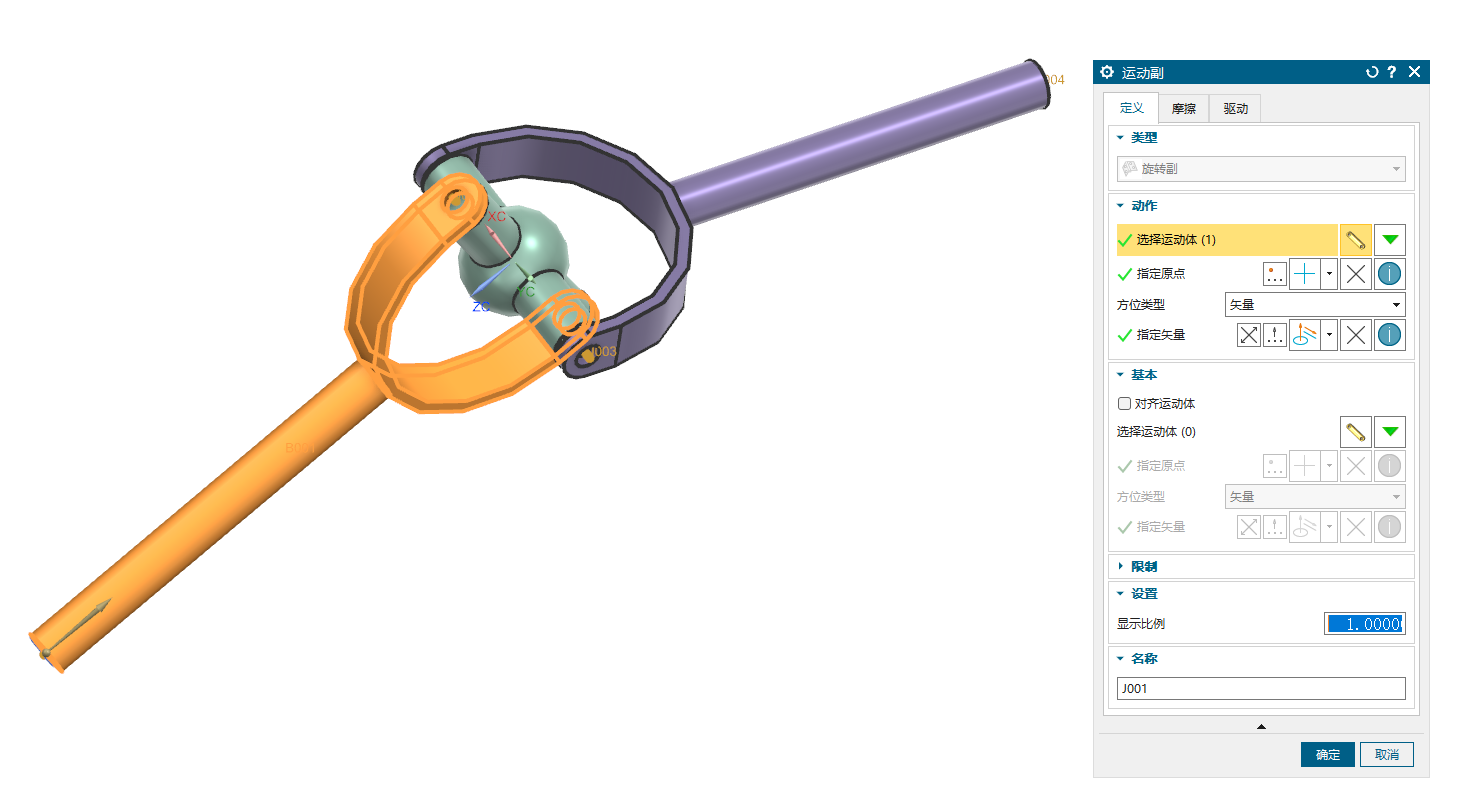
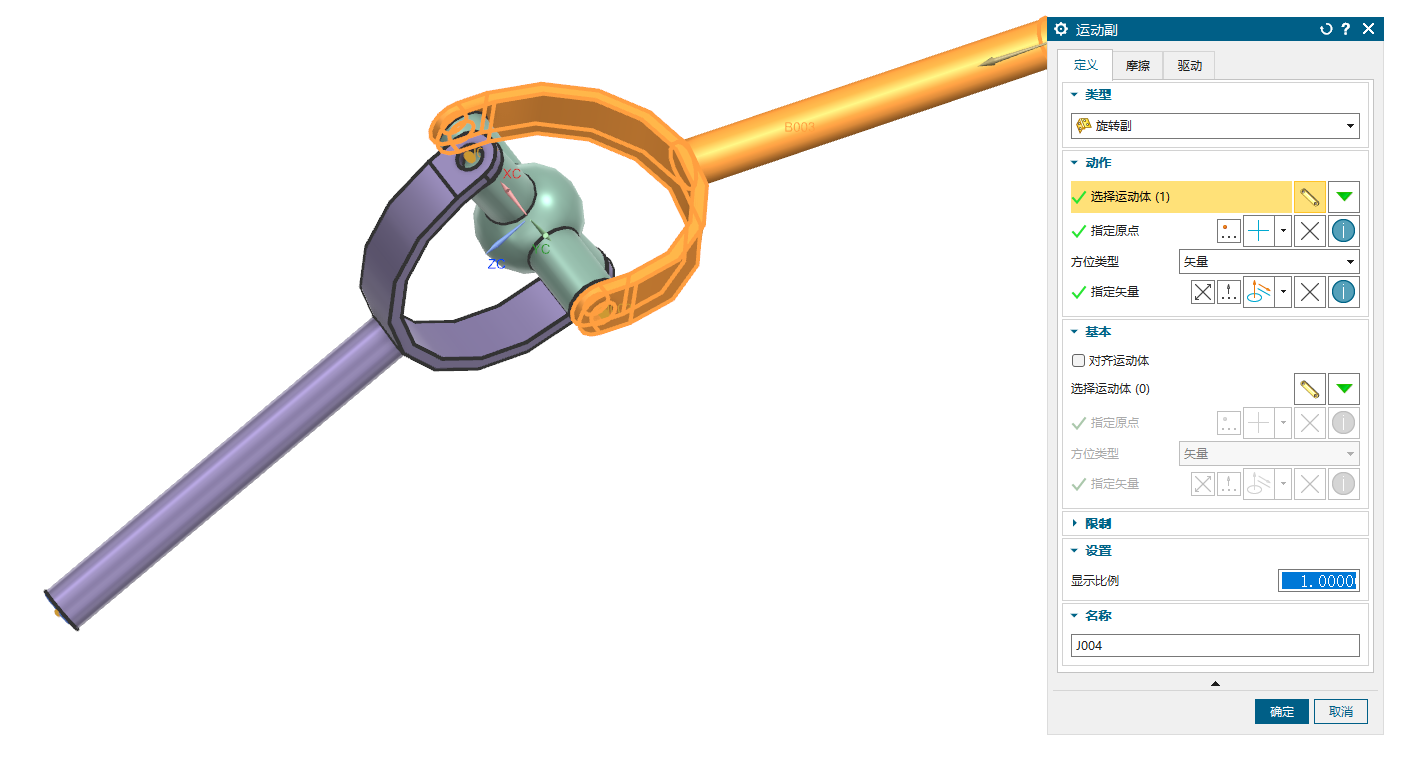
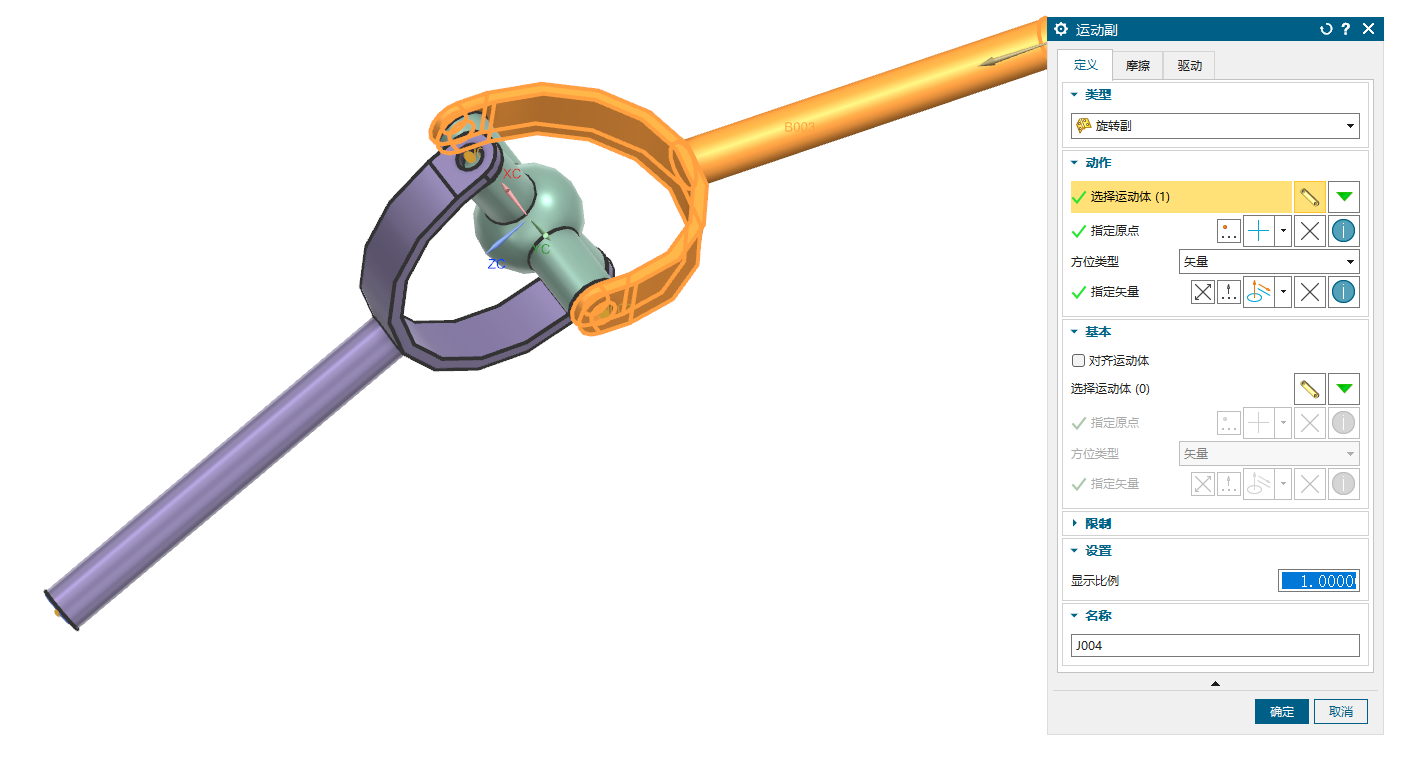
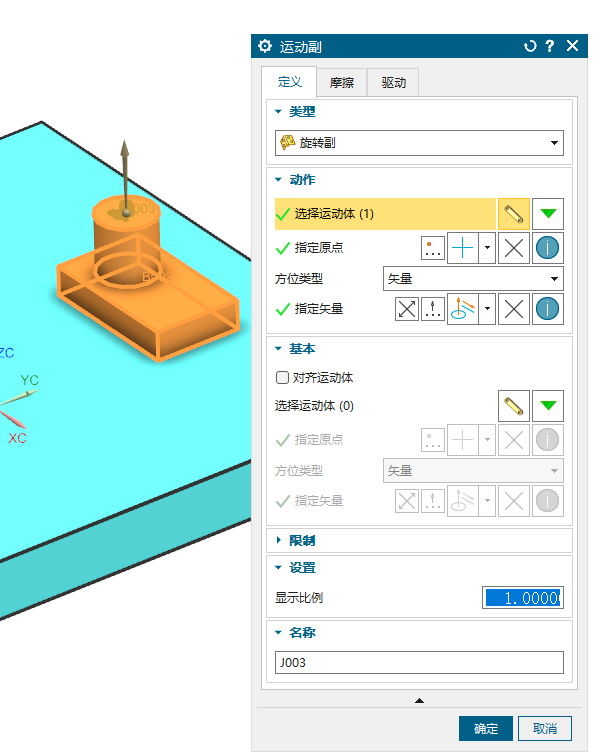
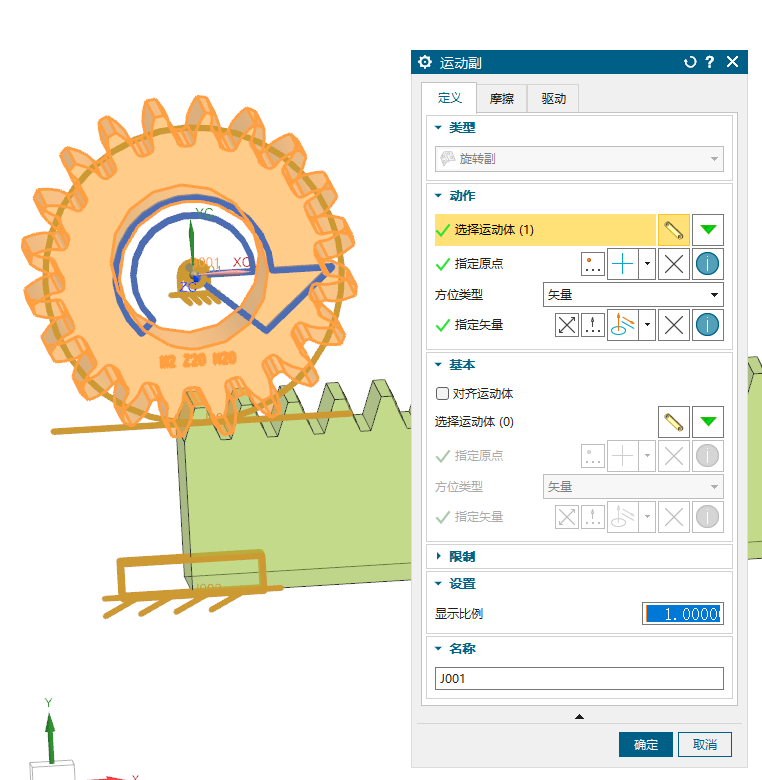
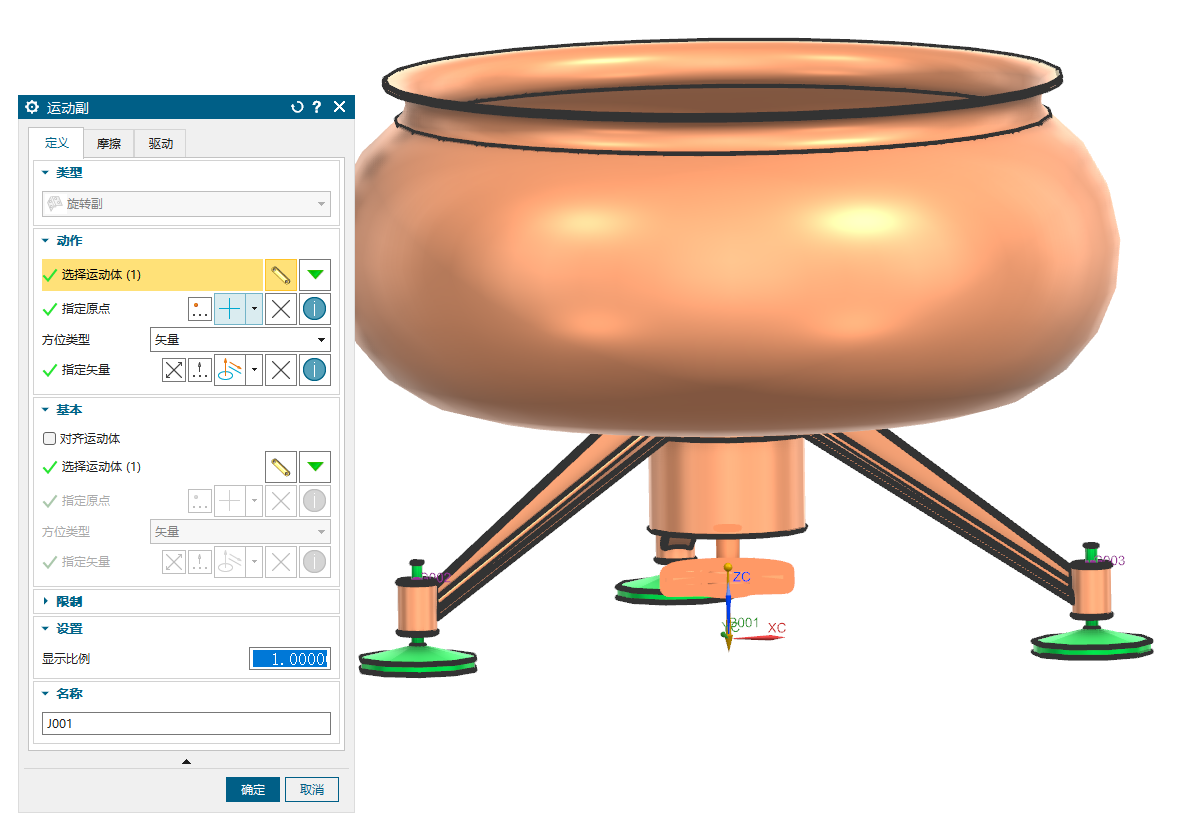
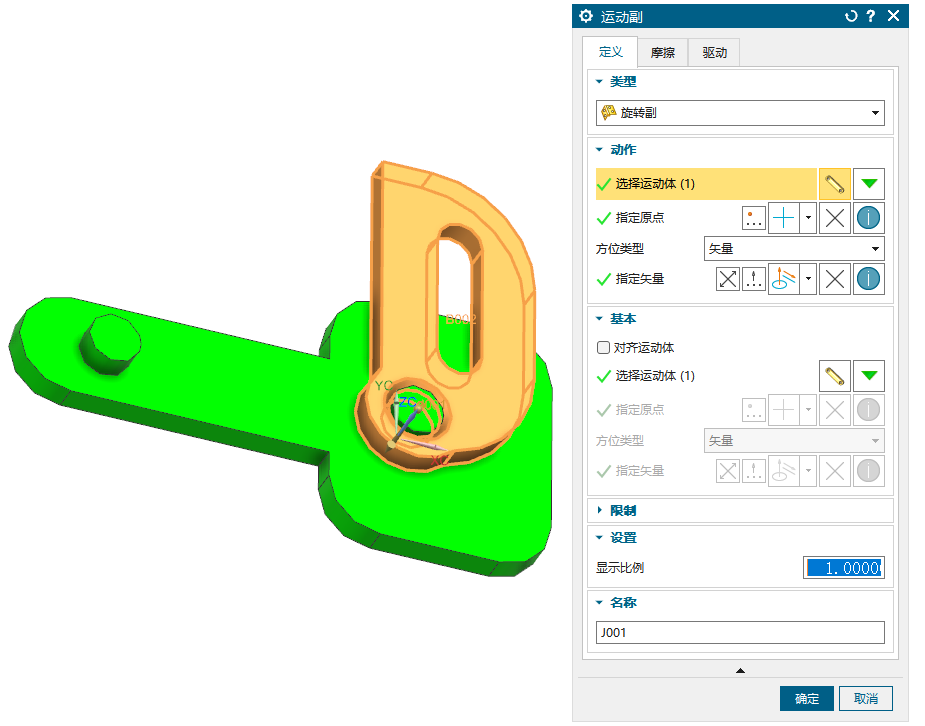
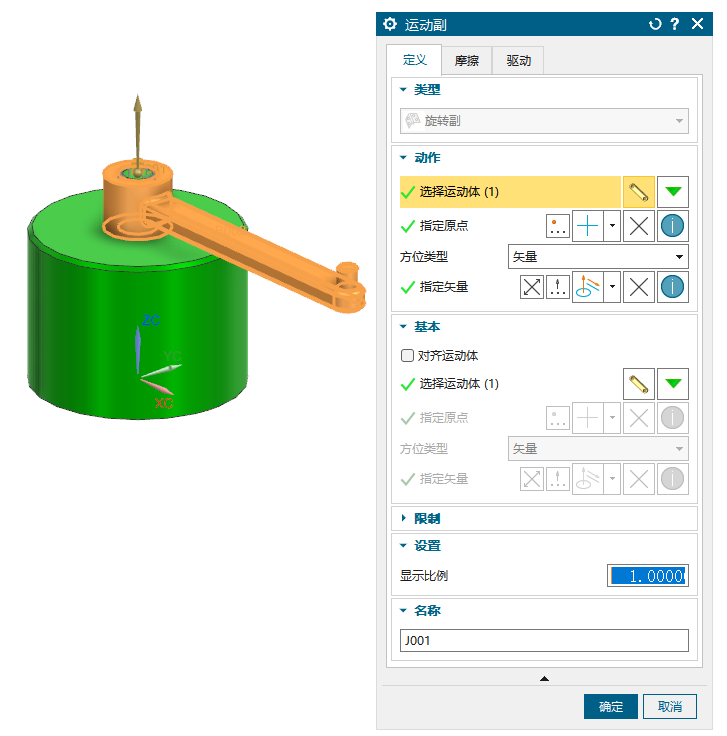
点开运动副
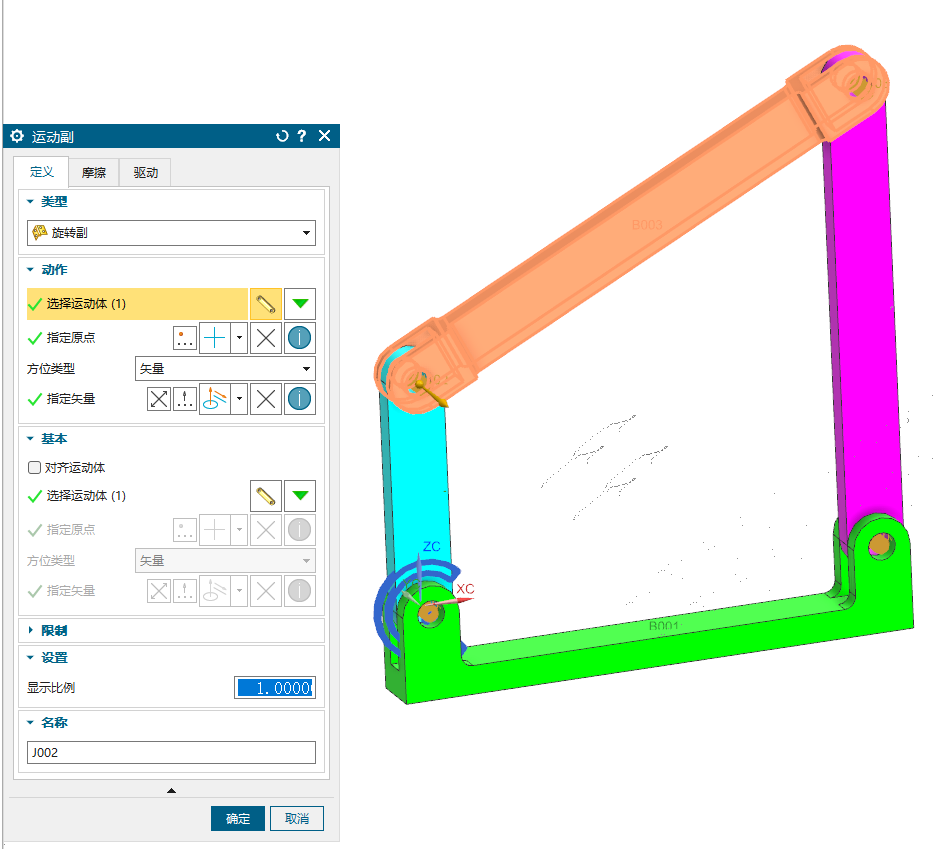
类型:旋转副
在动作组下,选择运动体时选图中黄色杆的铰孔边线或者与铰孔边线同轴的外圆轮廓边线,这样可以自动设置指定原点和指定矢量到铰孔轴线上,即铰链的旋转中心,不需要再手动点选。
动作组已经选了一根连杆,那基本组再直接设置铰链的另外一根连杆,即这里的绿色机架
可以设置过滤器筛选边
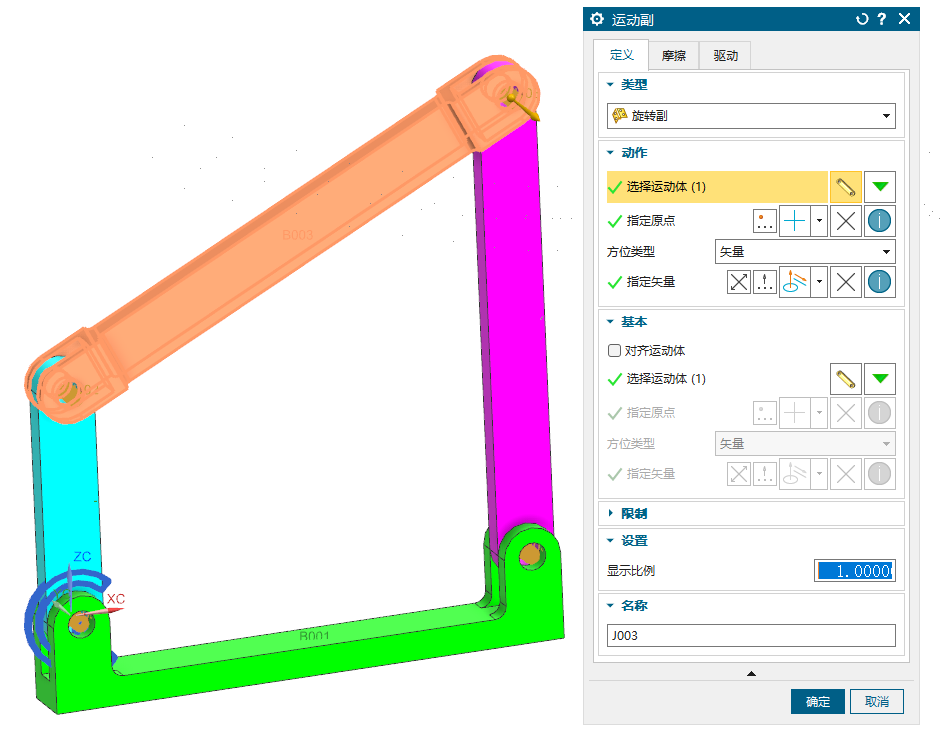
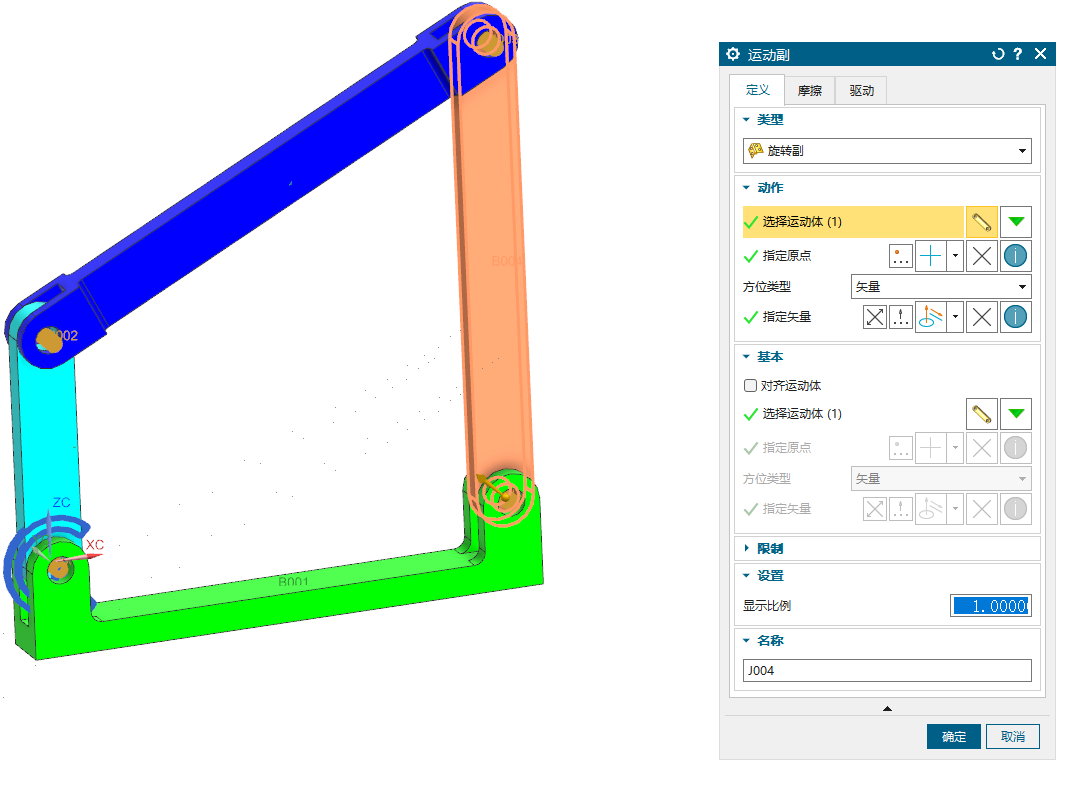
同样方式设置另外 3 个铰链
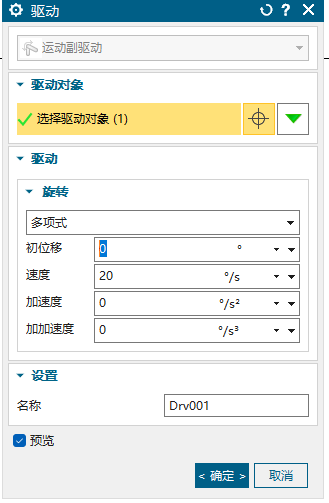
点开驱动体
这里选运动副驱动,准备将青色连杆作为驱动杆,旋转驱动对象可以从左边的运动导航器直接选J001,或者点击模型图上铰链处的J001铰链图标(注意将光标移动到铰链图标处的铰链名称附近,呈现选中效果才能点击选择)
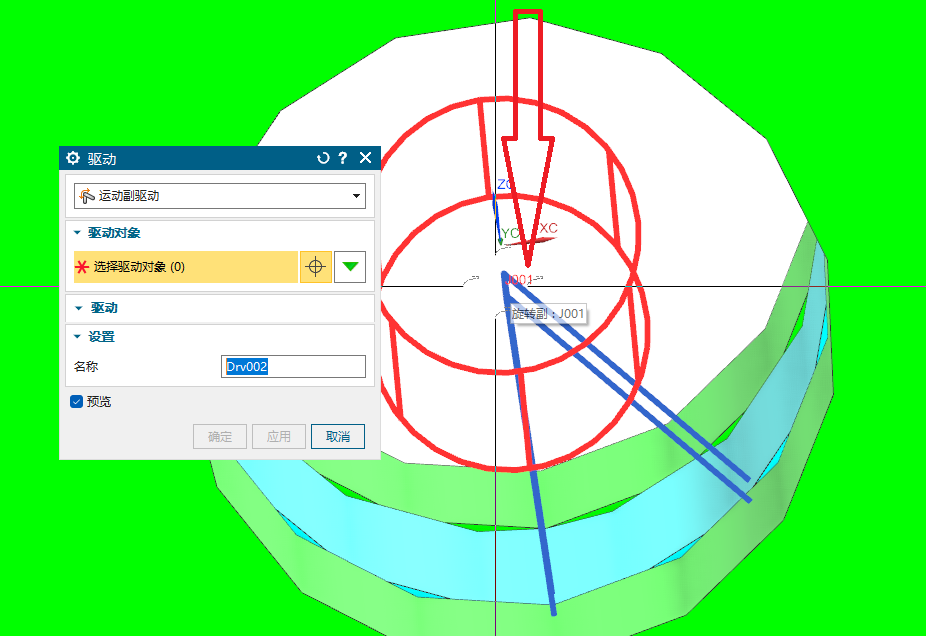
在驱动->旋转下选多项式,就设置了速度为 20°/s
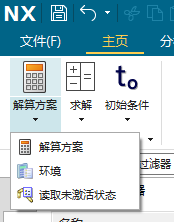
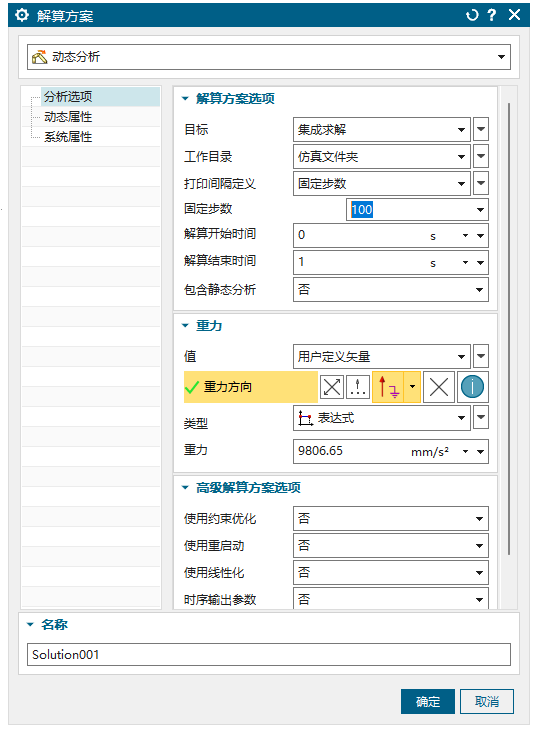
打开解算方案
打印间隔定义选固定步数,固定步数设置100,时间从 0s 到 1s。
设置完成,点击求解
求解完成
打开动画播放器

在设置中可以选择播放模式

也可以在结果功能区中播放,播放模式按设置进行

动画呈现
基于装配约束创建运动副
为机架添加固定约束,4 个铰链添加同心约束
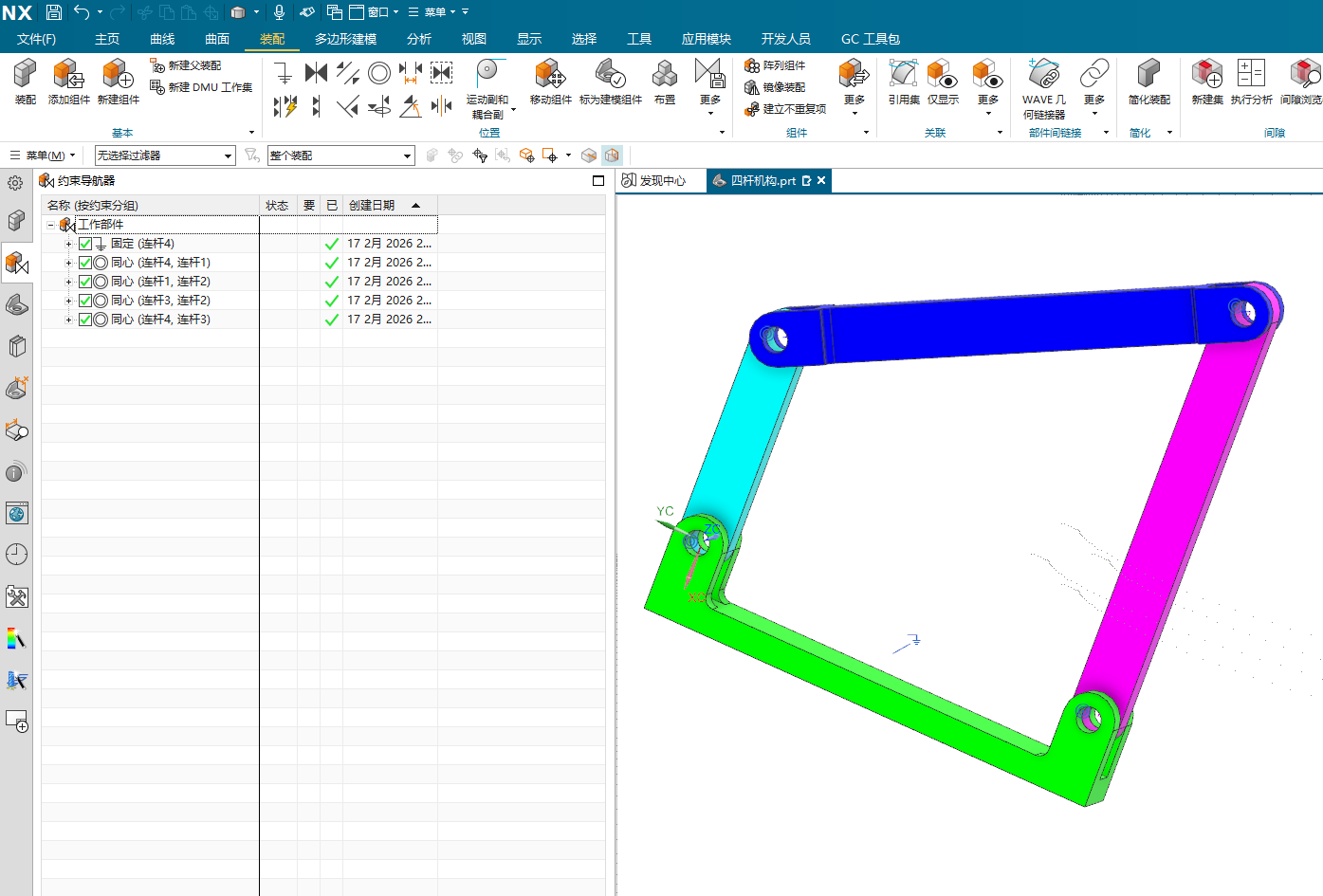
新建仿真,勾选基于组件的仿真
确定(取消则不使用已有的约束)
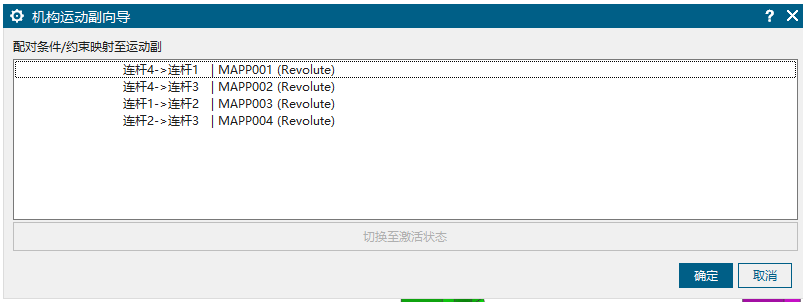
可以看到已经创建好运动体和运动副
接下来同样方式设置主动杆,再设置解算方案,最后求解即可。
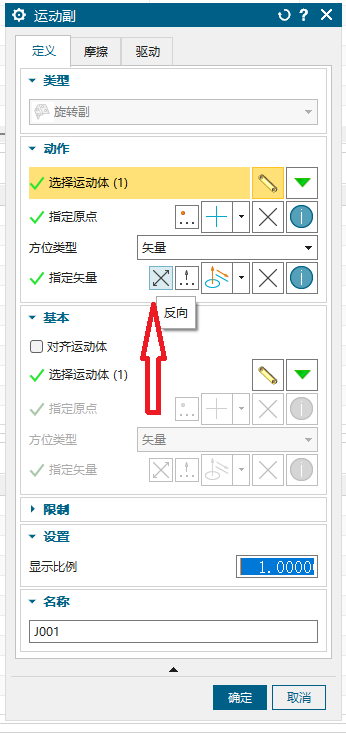
要反转运动方向的话,可以将驱动的运动副的矢量反转即可(右手大拇指指向矢量方向,其余手指的指向就是旋转方向)
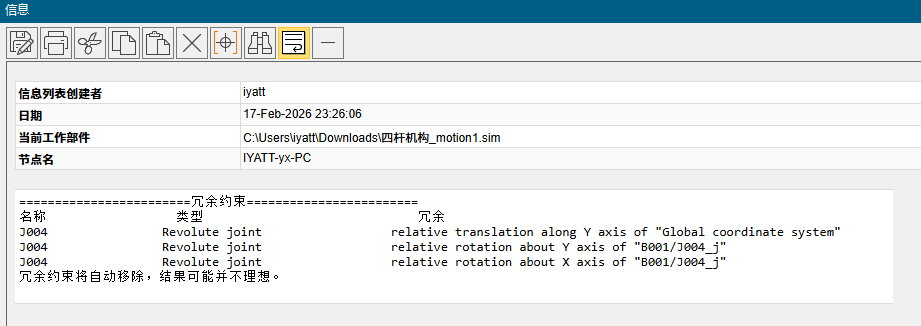
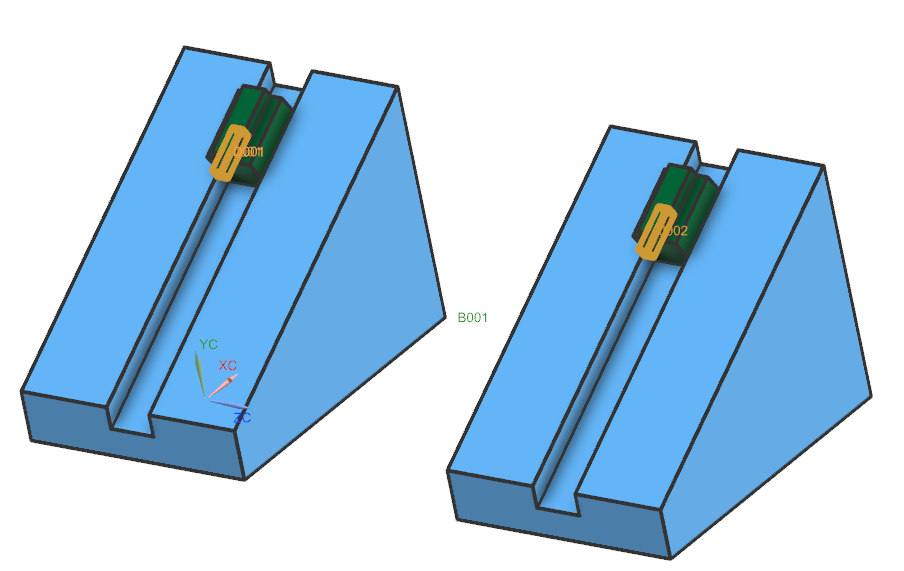
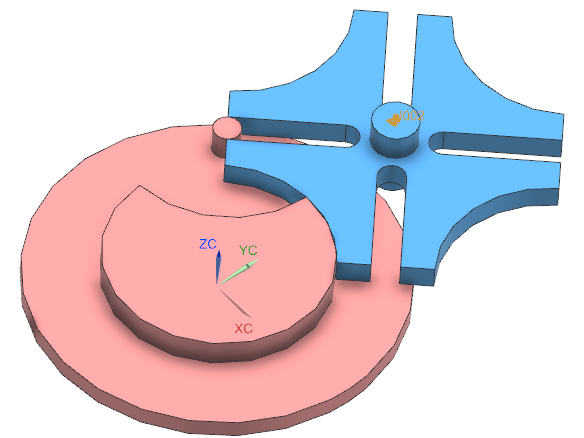
未装配到位的转动副
模型里轴未插入孔中
新建仿真,将两个零件创建为运动体,其中轴固定

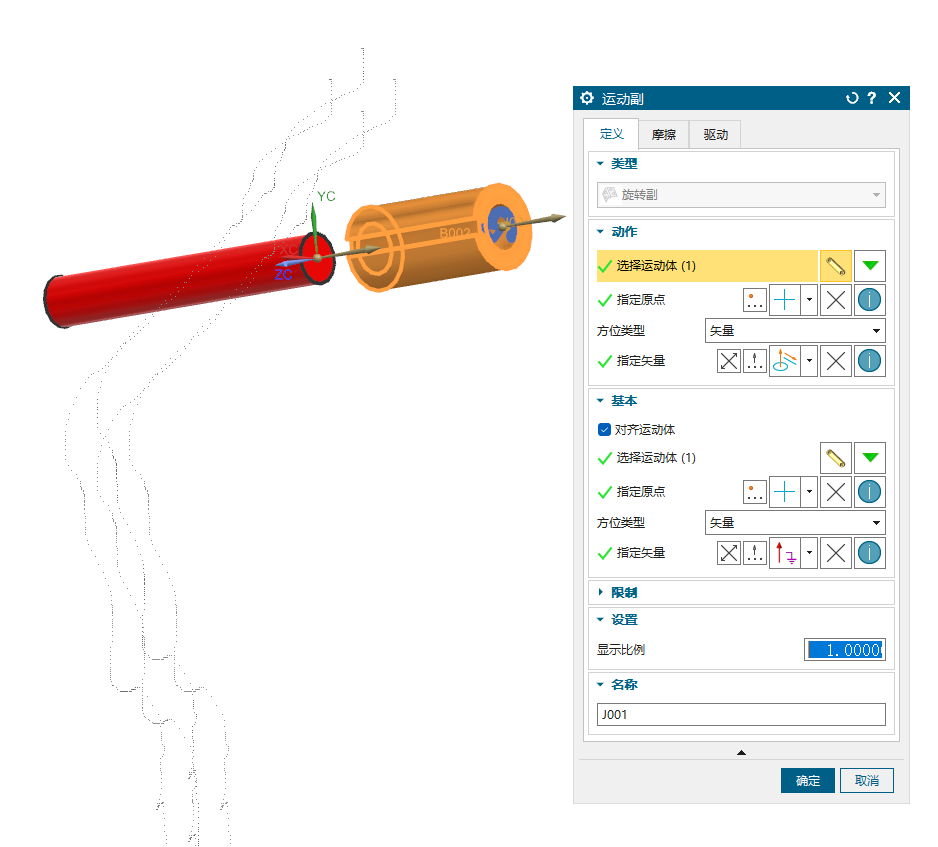
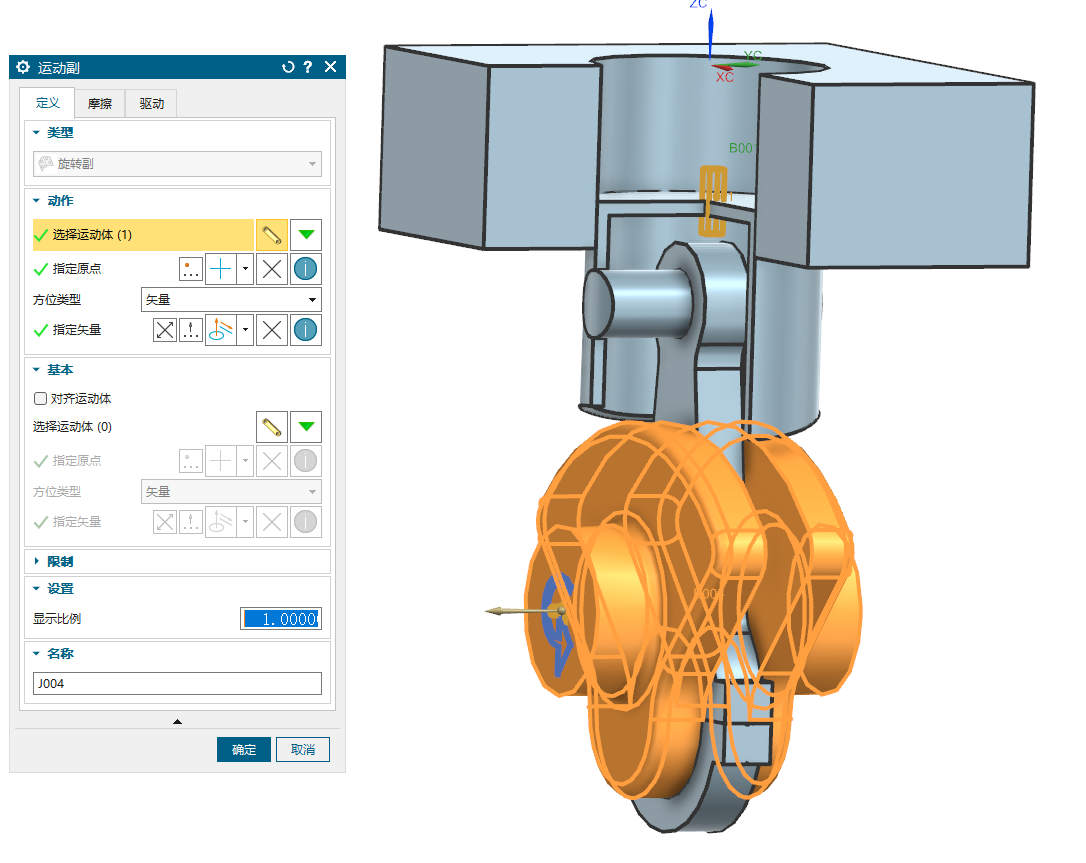
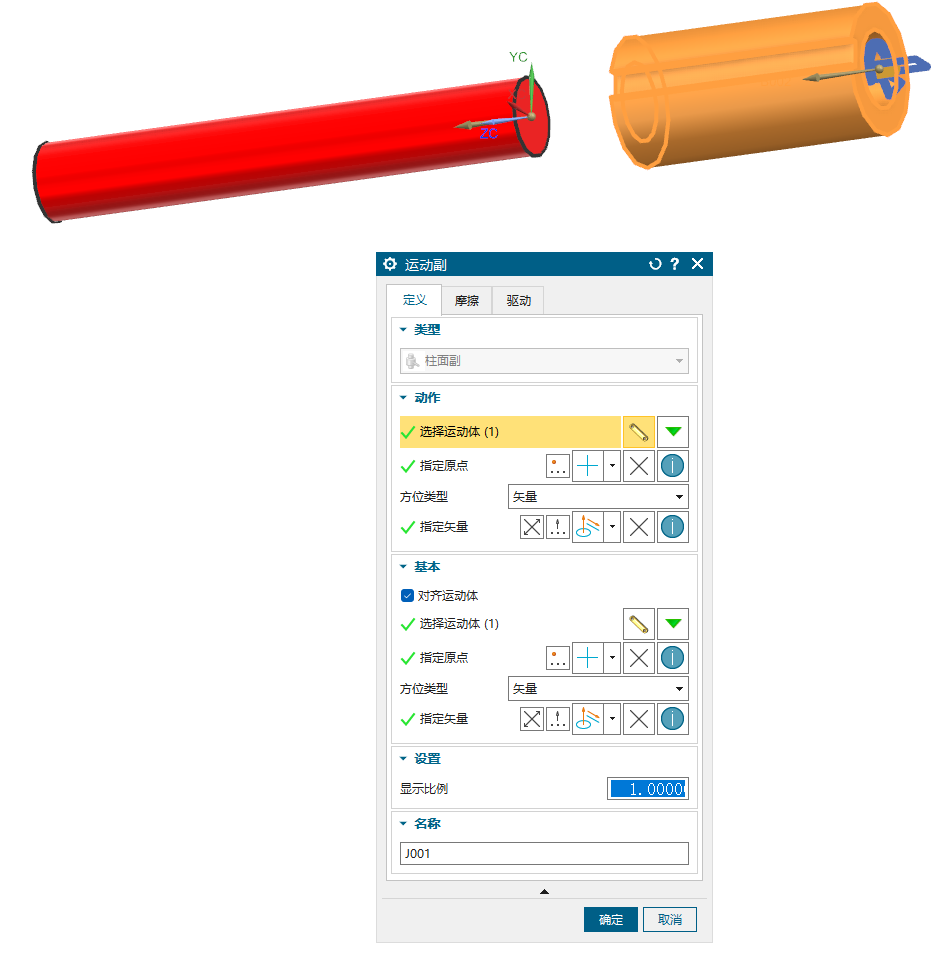
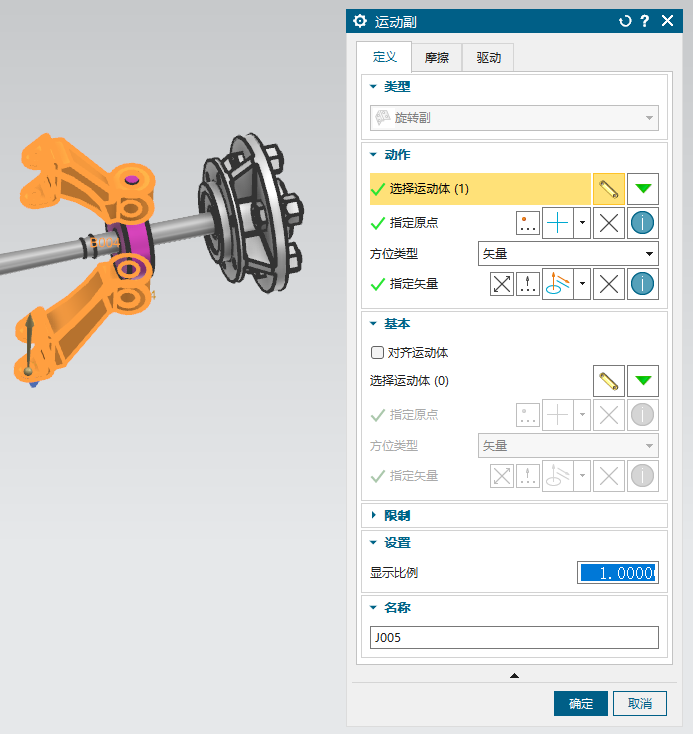
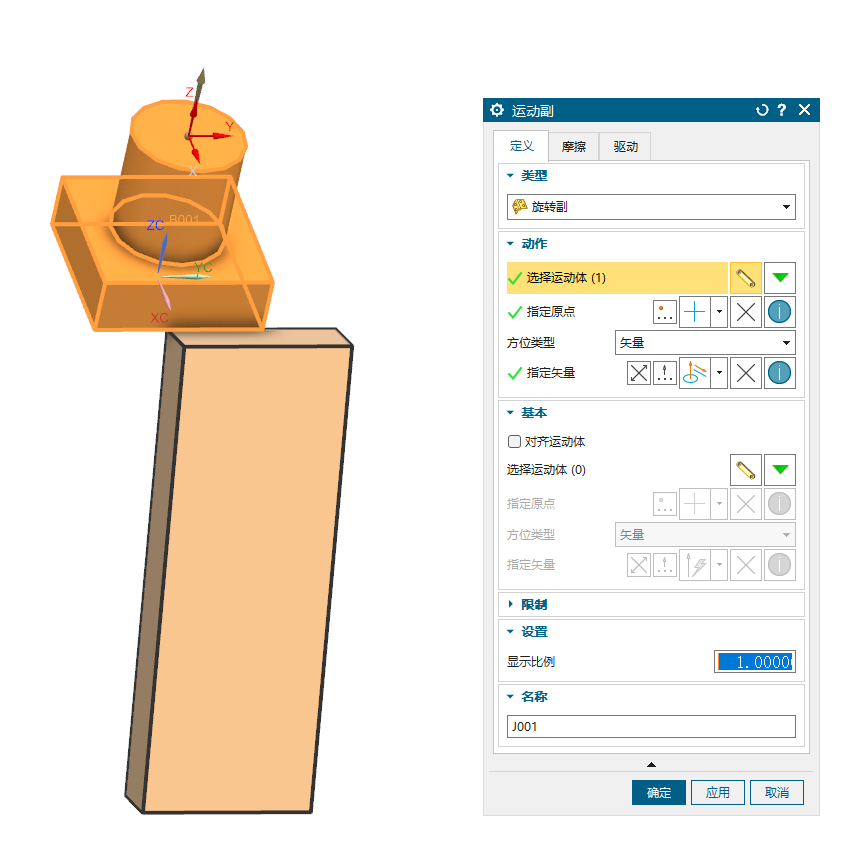
创建旋转副
动作组,选择有槽的圆柱环的圆边线
基本组,勾选对齐运动体,然后在轴的同侧选圆边线,这样同时设置原点和矢量,后面计算仿真时会通过原点和矢量对齐
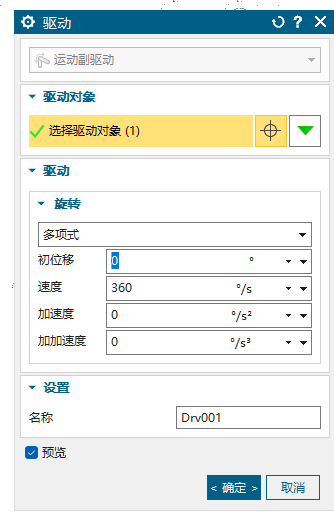
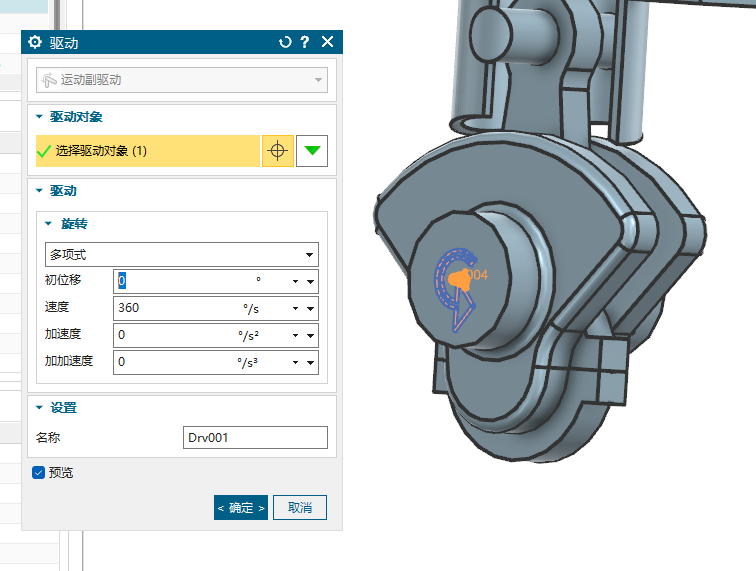
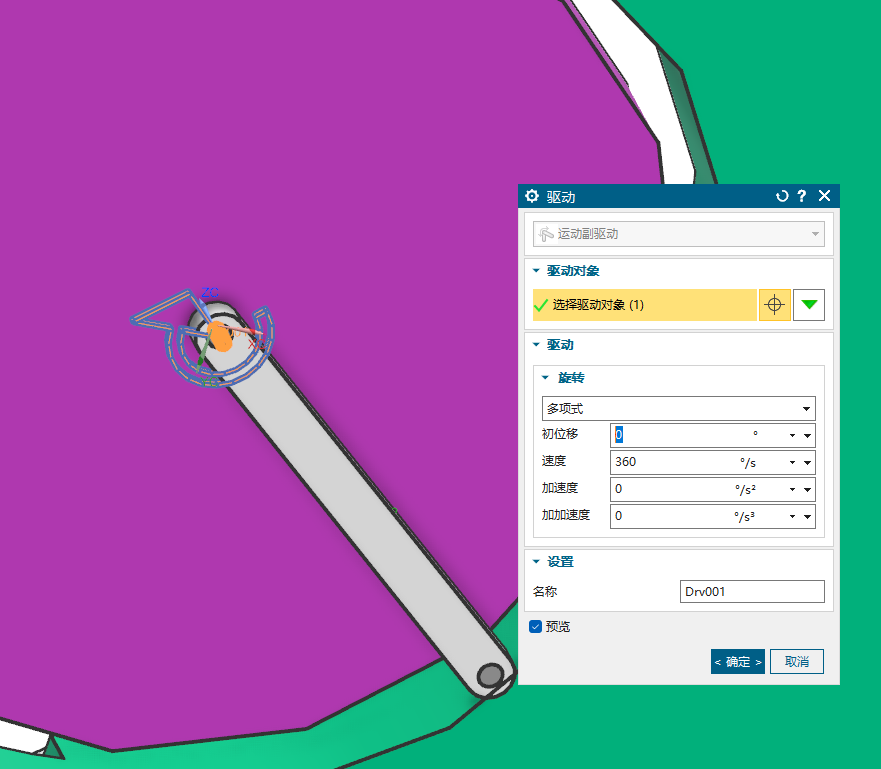
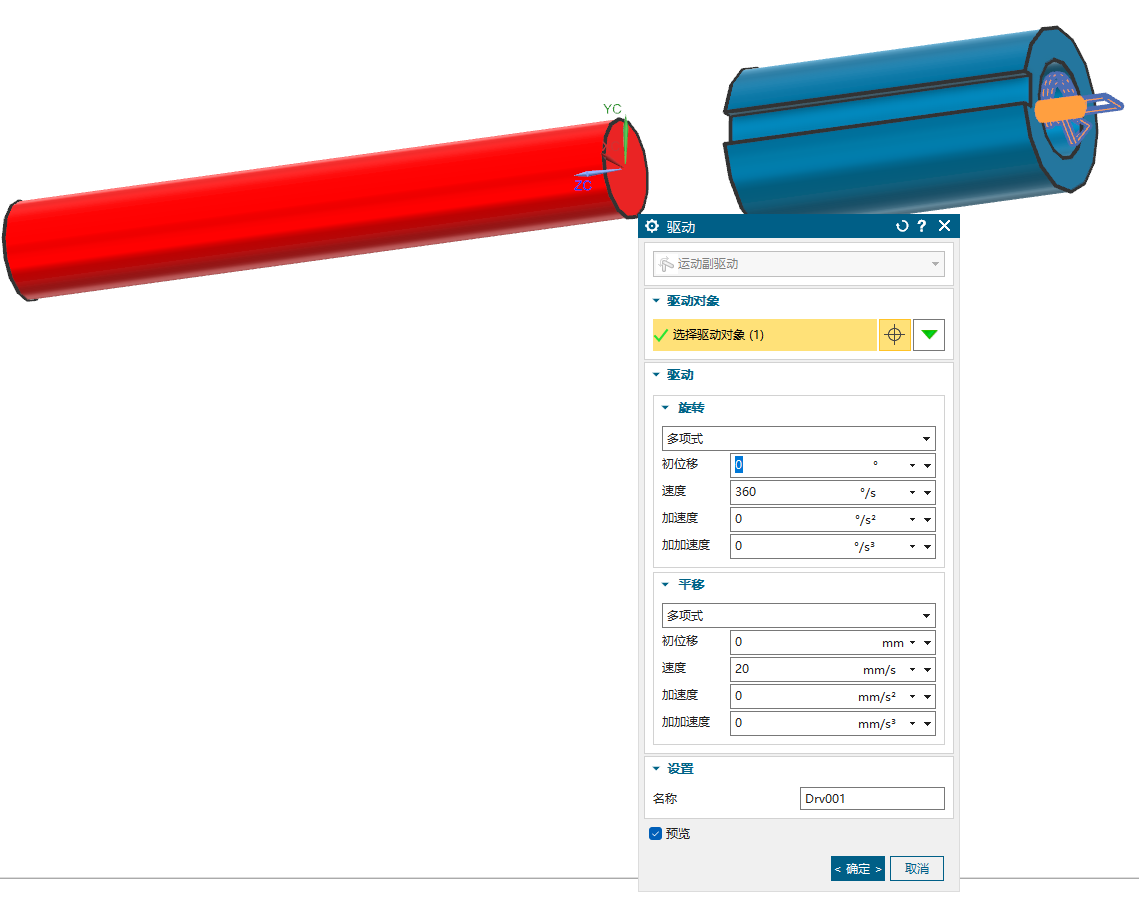
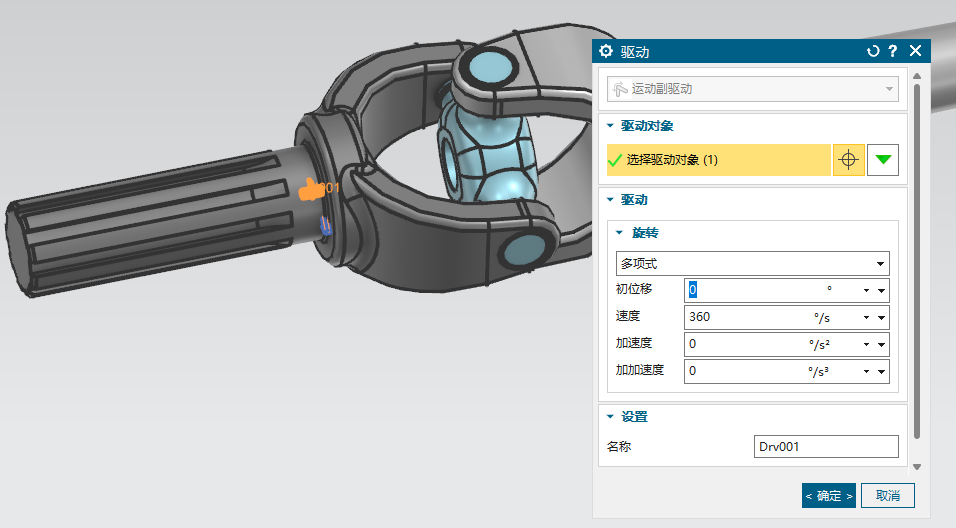
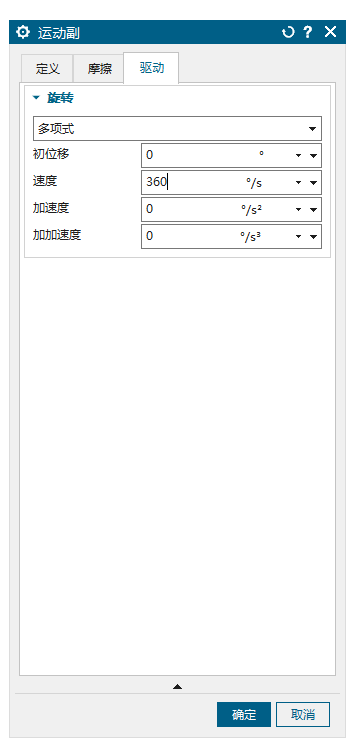
设置驱动,驱动对象就是前面设置的旋转副,速度 360°/s
仿真动画
可以看到已经自动对齐了
曲柄摇杆机构
这也是四杆机构的一种,配置方法同上面的四杆机构
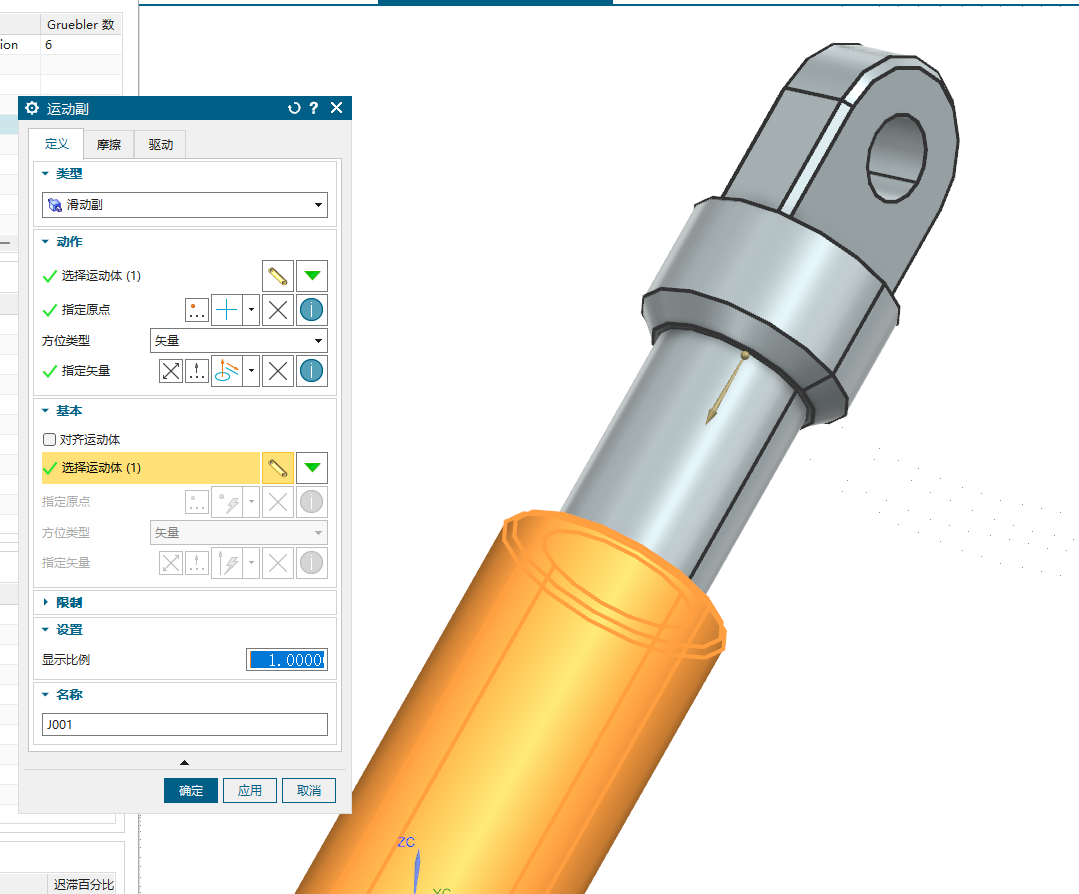
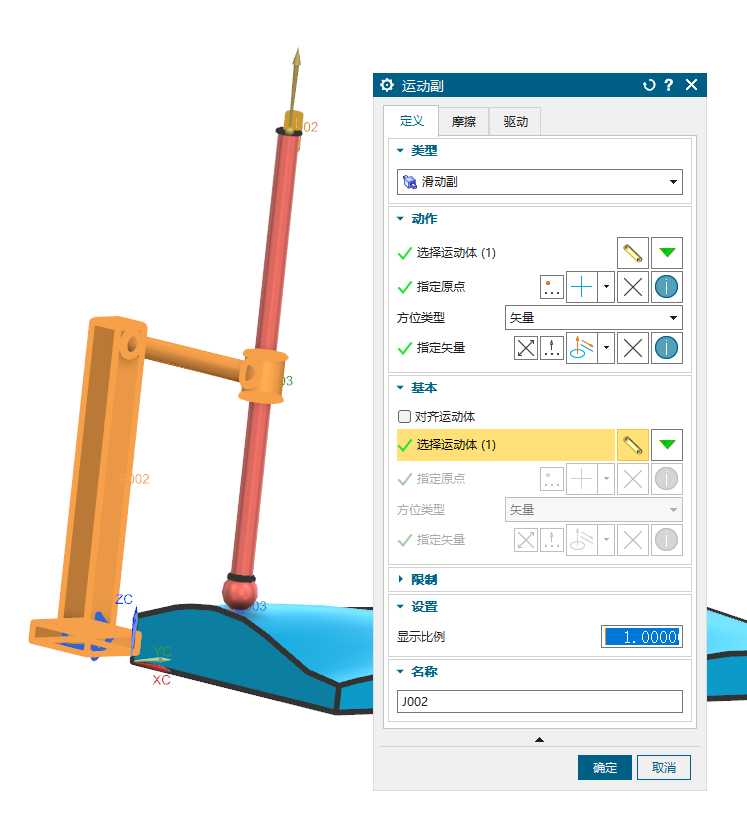
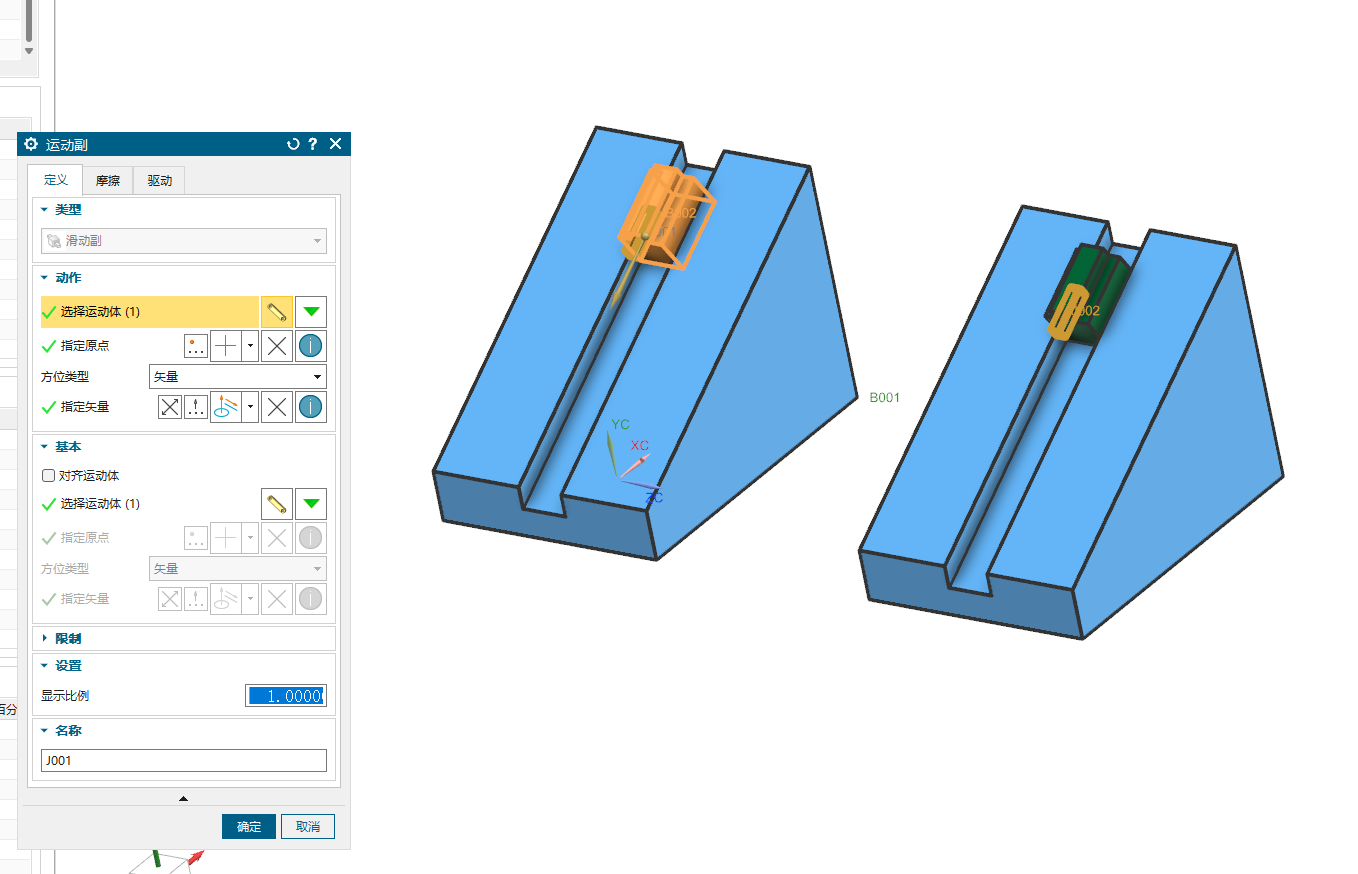
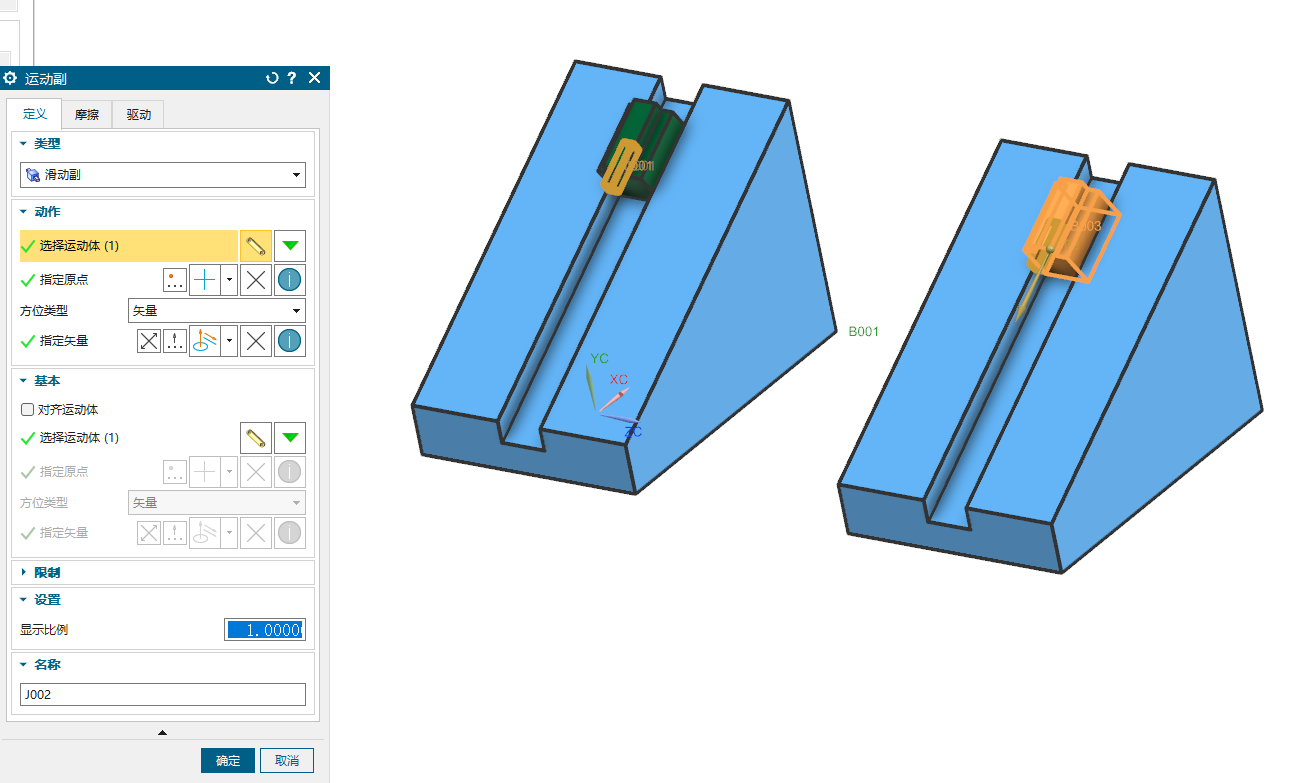
滑动副
创建运动体,一侧固定
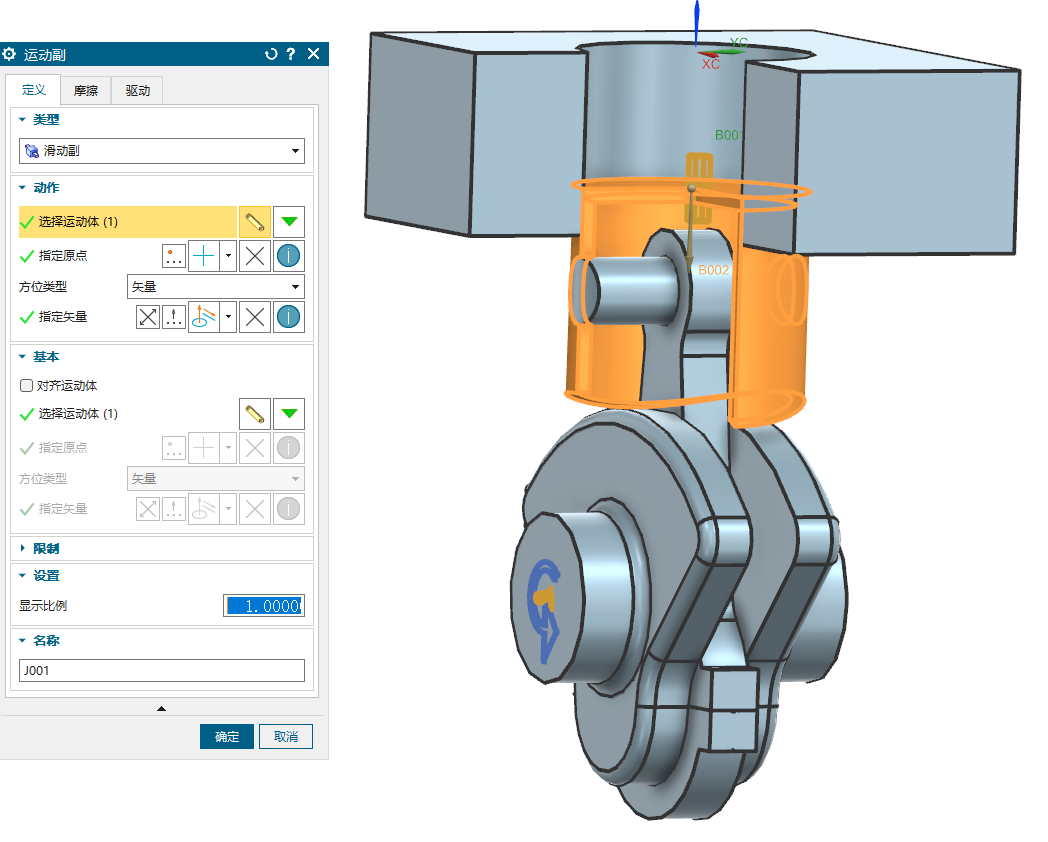
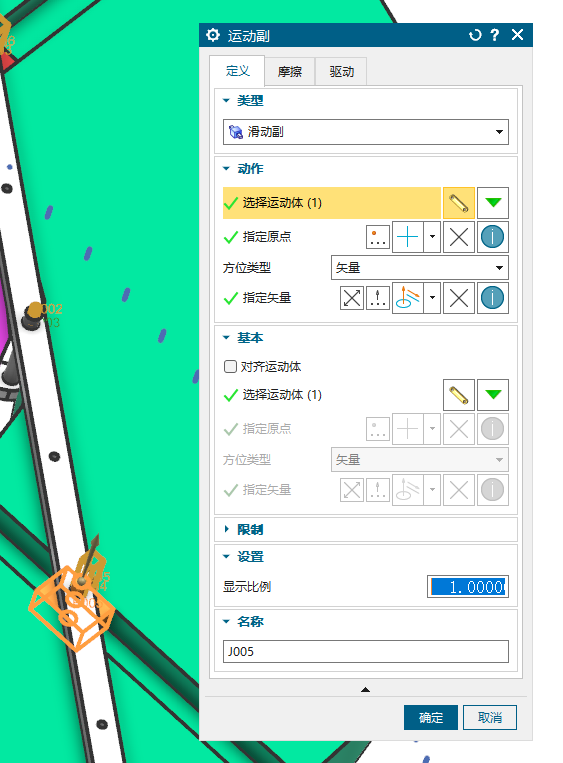
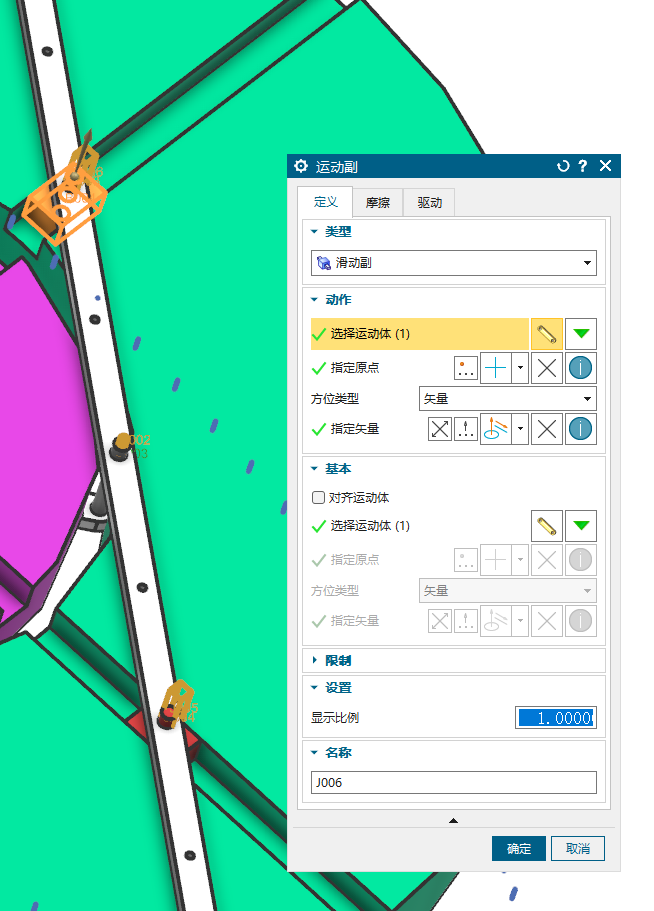
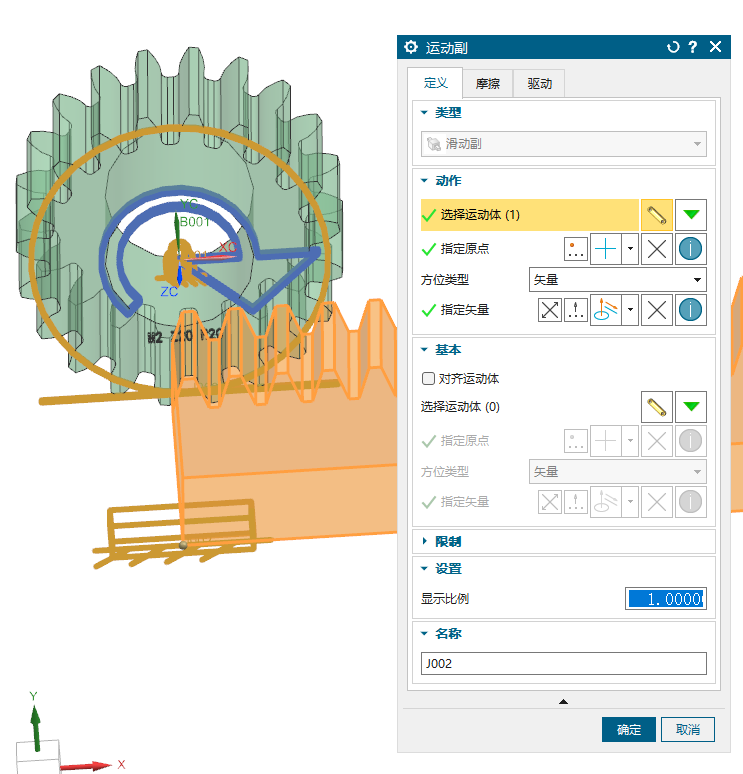
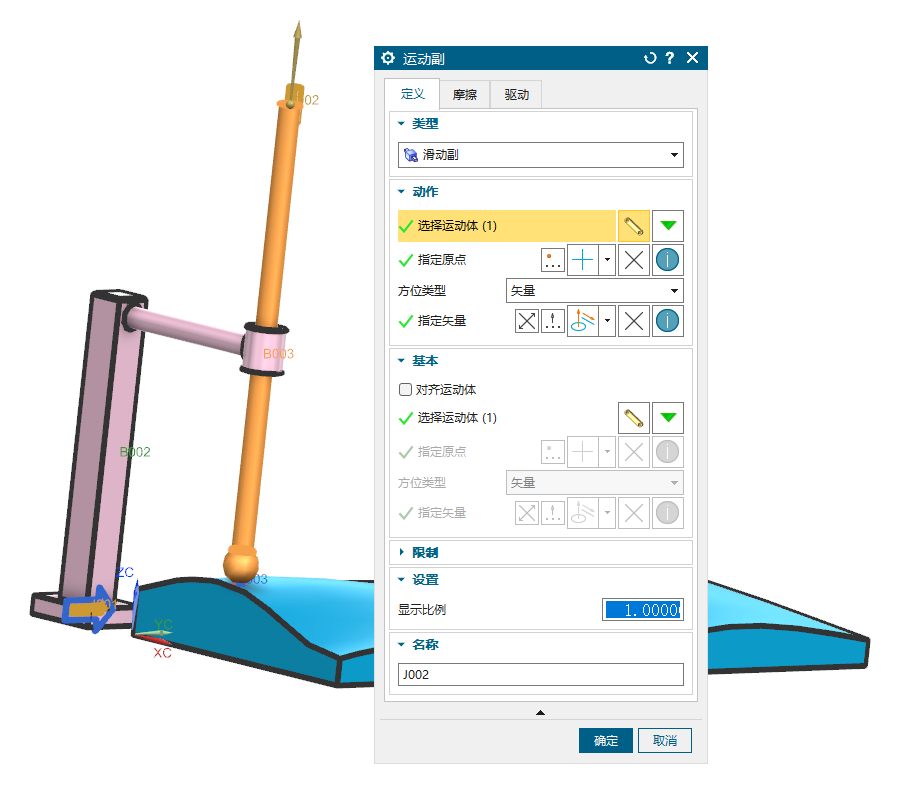
运动副选滑动副
动作组选活动杆上的上的一条圆边线,可以同时选运动体、原点和矢量
基本组的选择运动体选固定杆
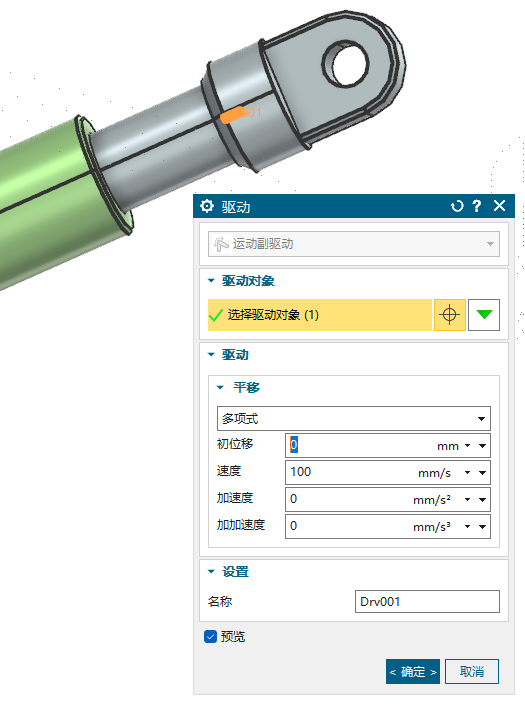
设置驱动
动画
曲柄滑块机构
将机架设置为固定运动体
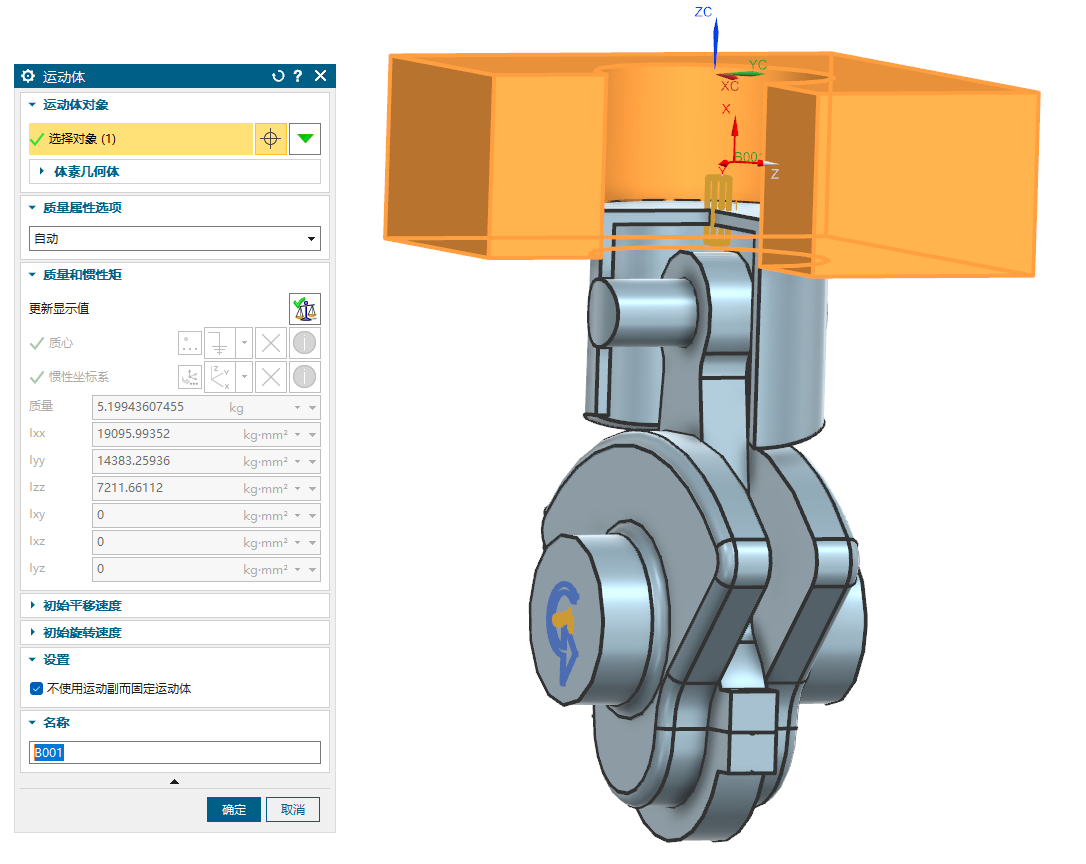
将滑块设置为运动体
将轴销、连杆、连杆盖设置为一个运动体

将曲柄设置为运动体
机架和滑块之间创建滑动副
轴销和滑块间创建旋转副
连杆或连杆盖与曲柄之间创建旋转副
最后为曲柄创建旋转副,不指定铰链的另外一根杆,则另一侧默认连接机架
图示上会显示固定支座符号

给曲柄创建驱动,360°/s 的速度
动画
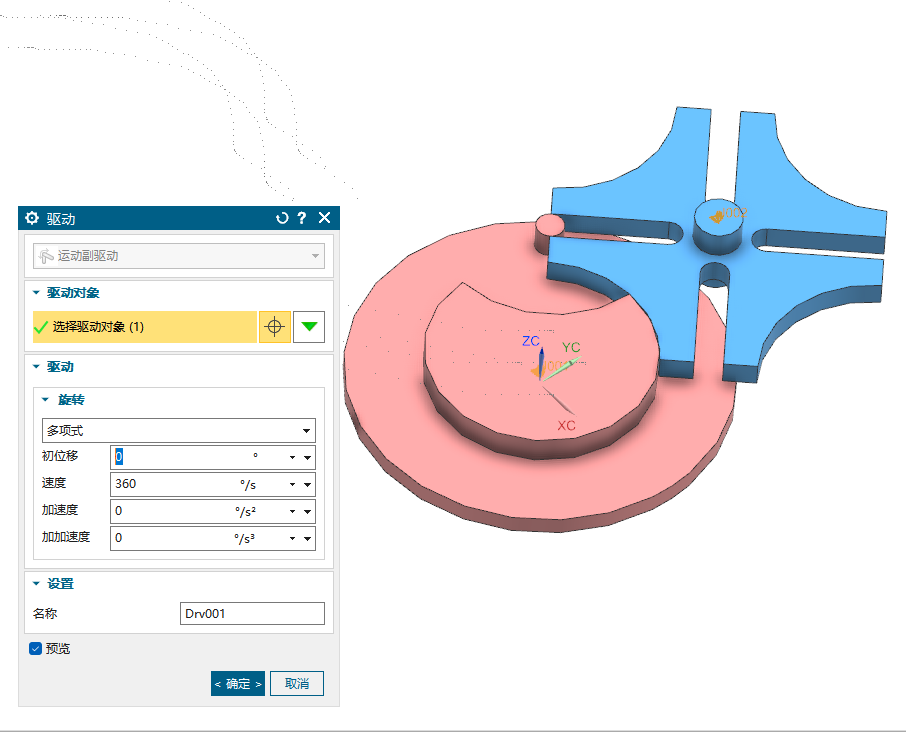
阿基米德椭圆规 – 运动轨迹追踪
将圆盘和圆环创建为一个固定运动体
将主动杆和轴销创建为一个运动体
将连杆创建为运动体
将滑块和轴销创建为一个运动体
创建主动杆相对圆盘的旋转副
创建连杆相对主动杆的旋转副
创建滑块轴销相对连杆的旋转副
创建滑块相对圆环的滑动副
在主动杆的旋转副创建驱动
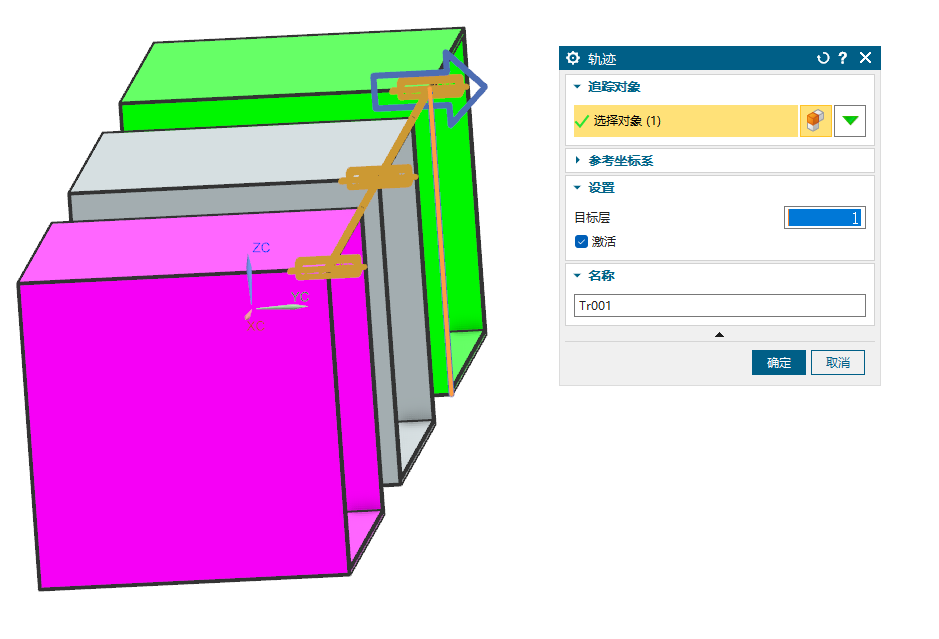
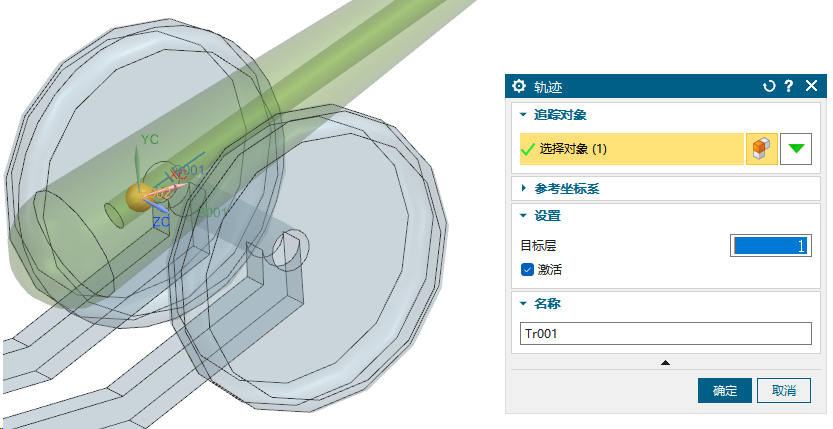
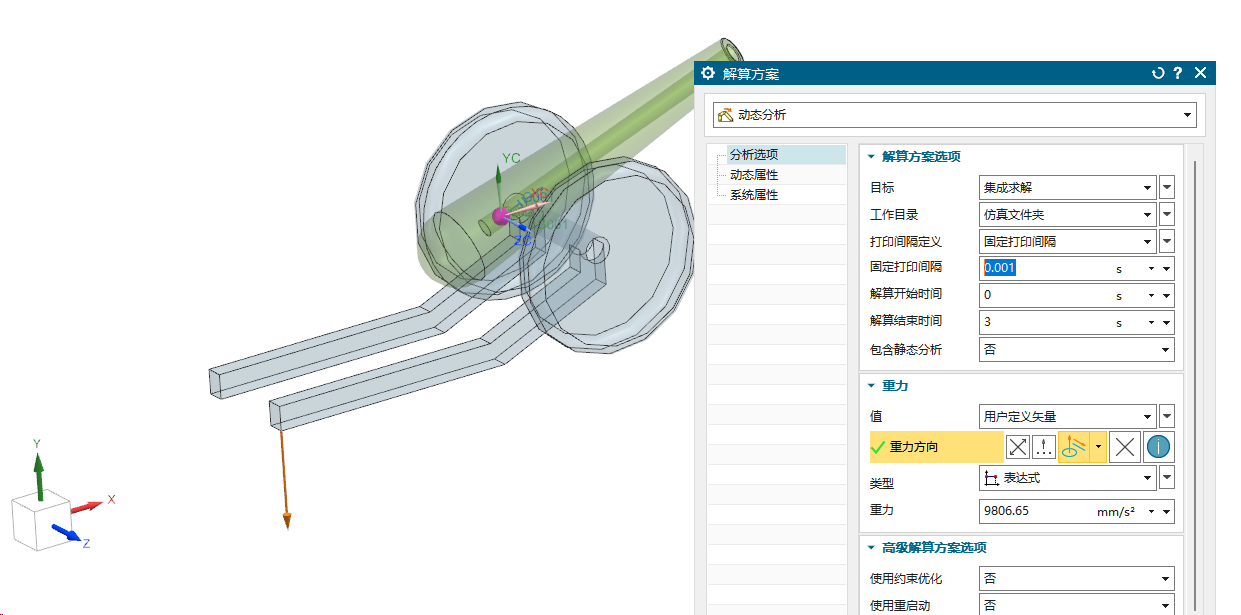
创建解算方案并求解,在分析中点开追踪
筛选连杆的边线
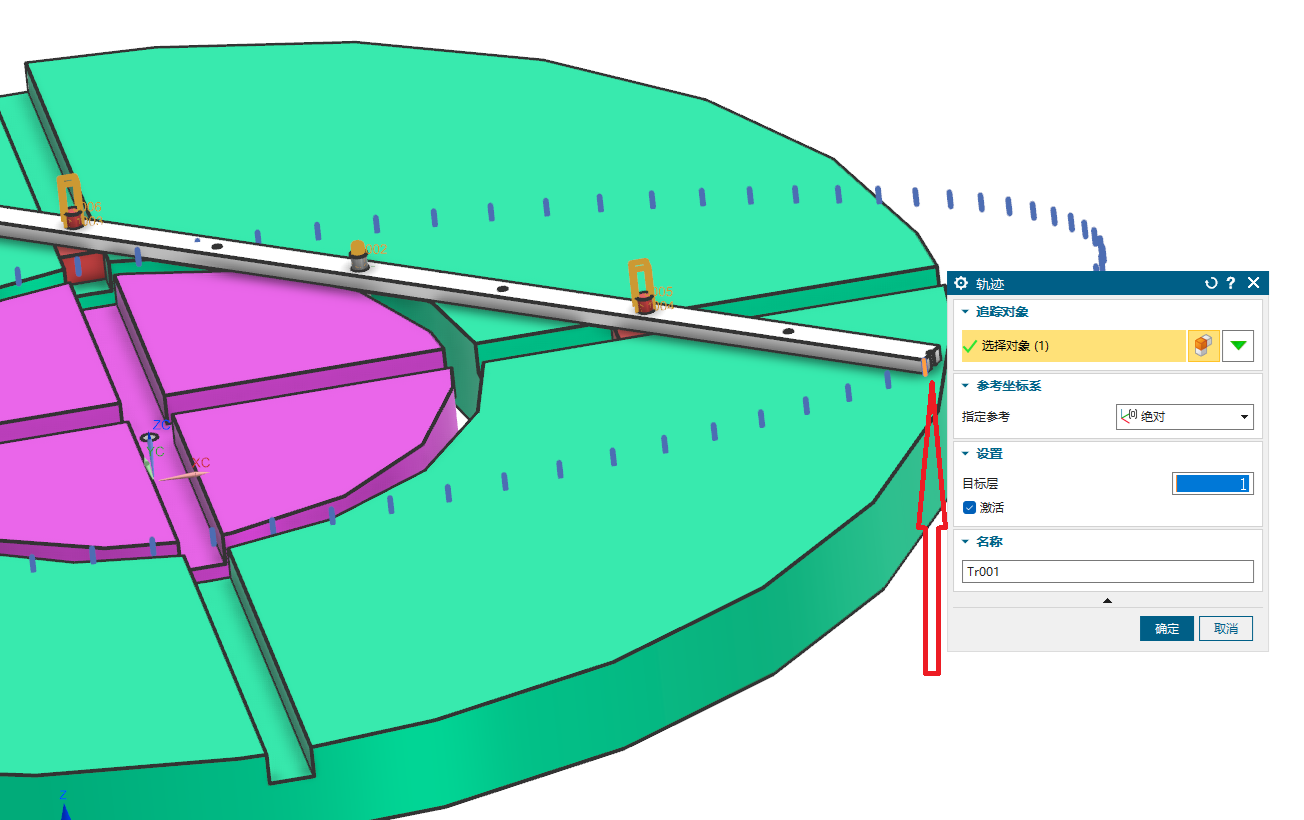
打开动画播放器,在封装选项中勾选轨迹

播放动画
可以看到连杆边线的轨迹是一个椭圆
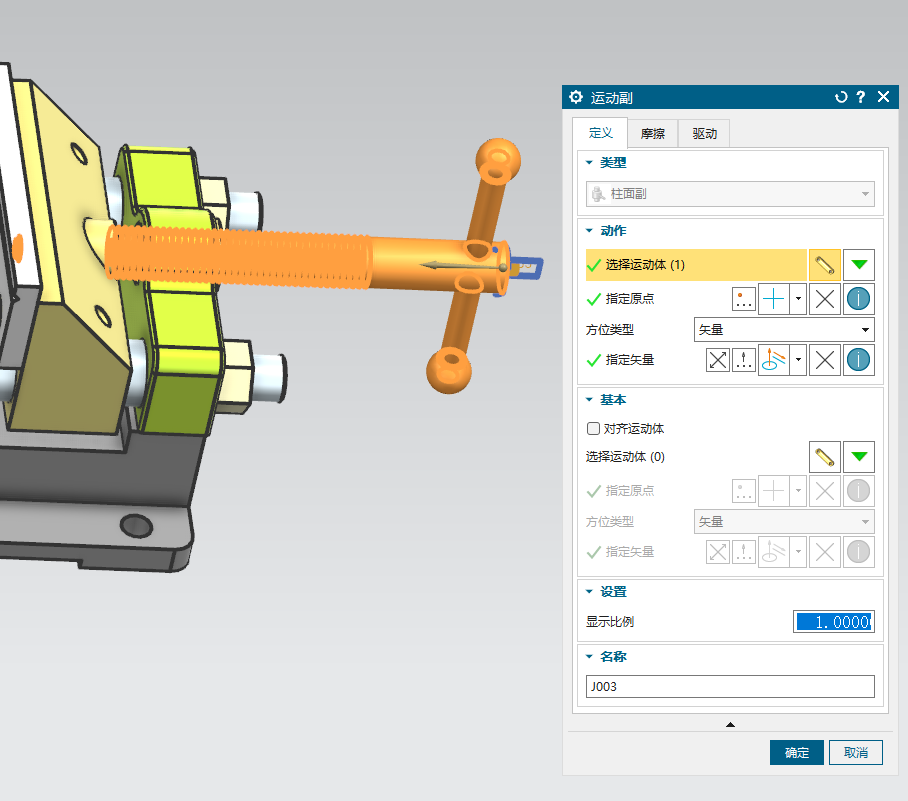
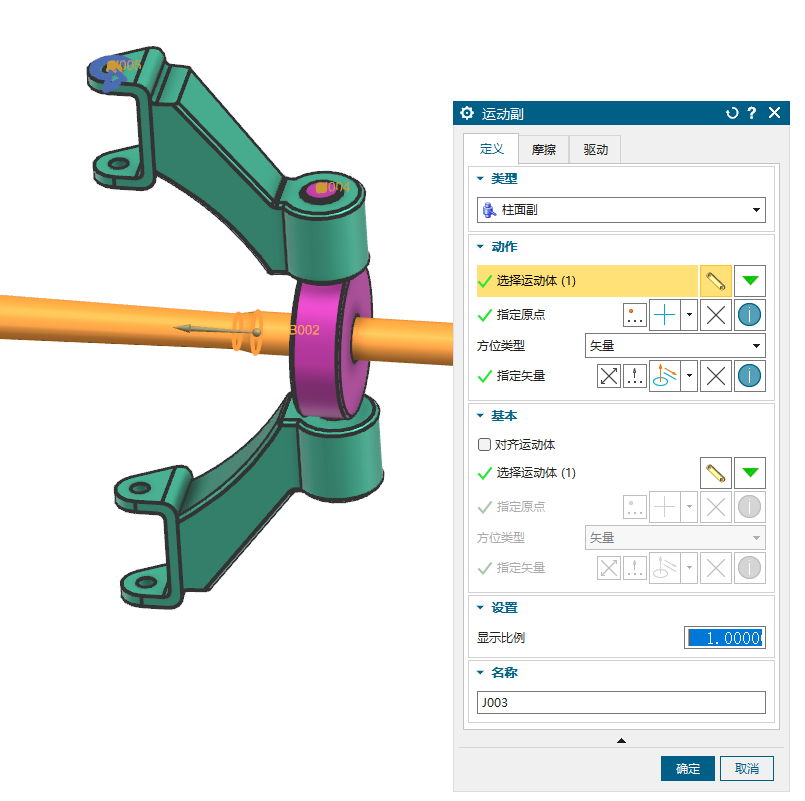
柱面副
模型还是使用前面的旋转副
还是将两个部件创建为运动体,其中一个固定。
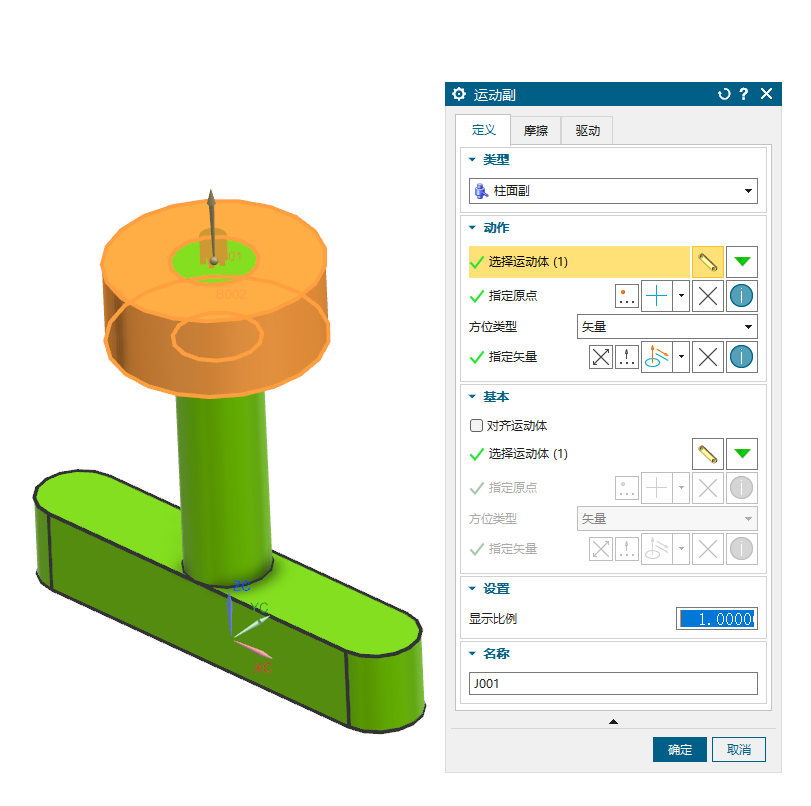
创建柱面副
创建驱动
柱面副可以旋转和平移,有 2 个自由度
动画
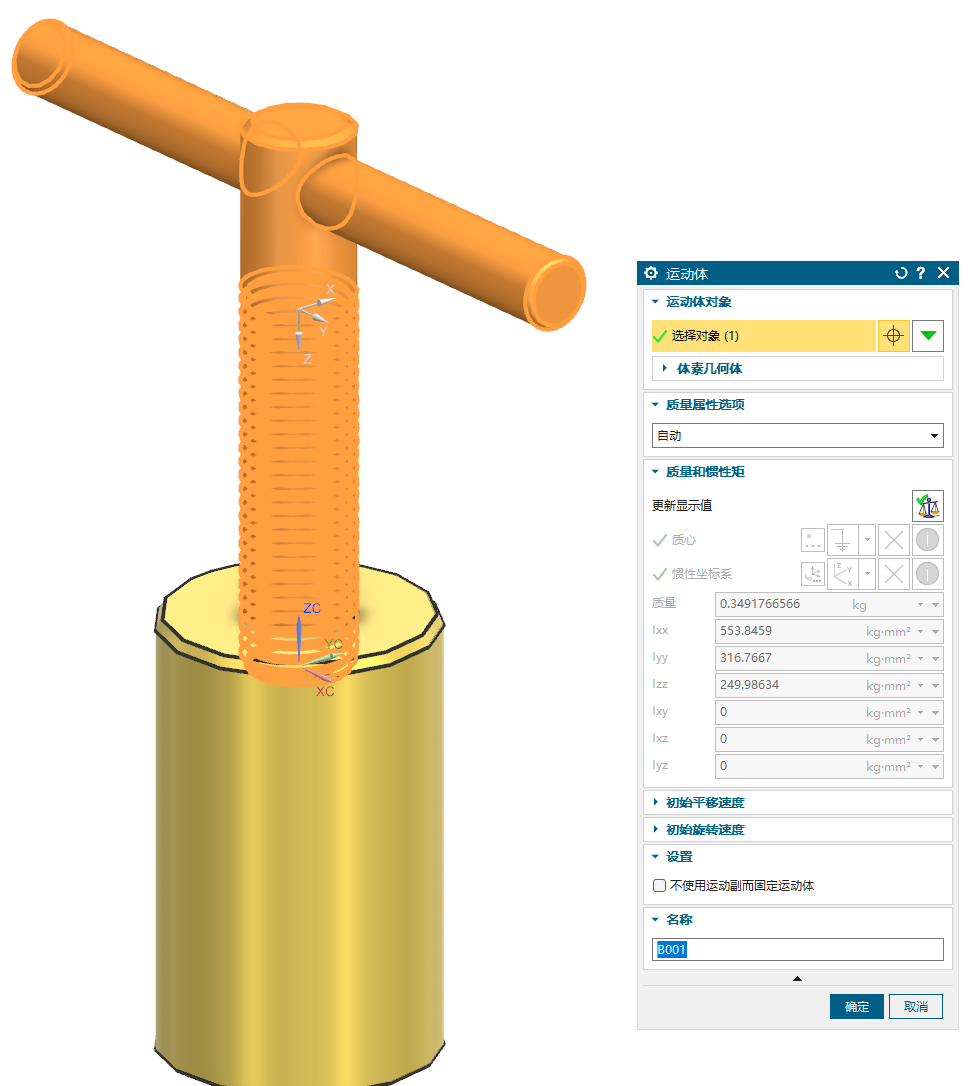
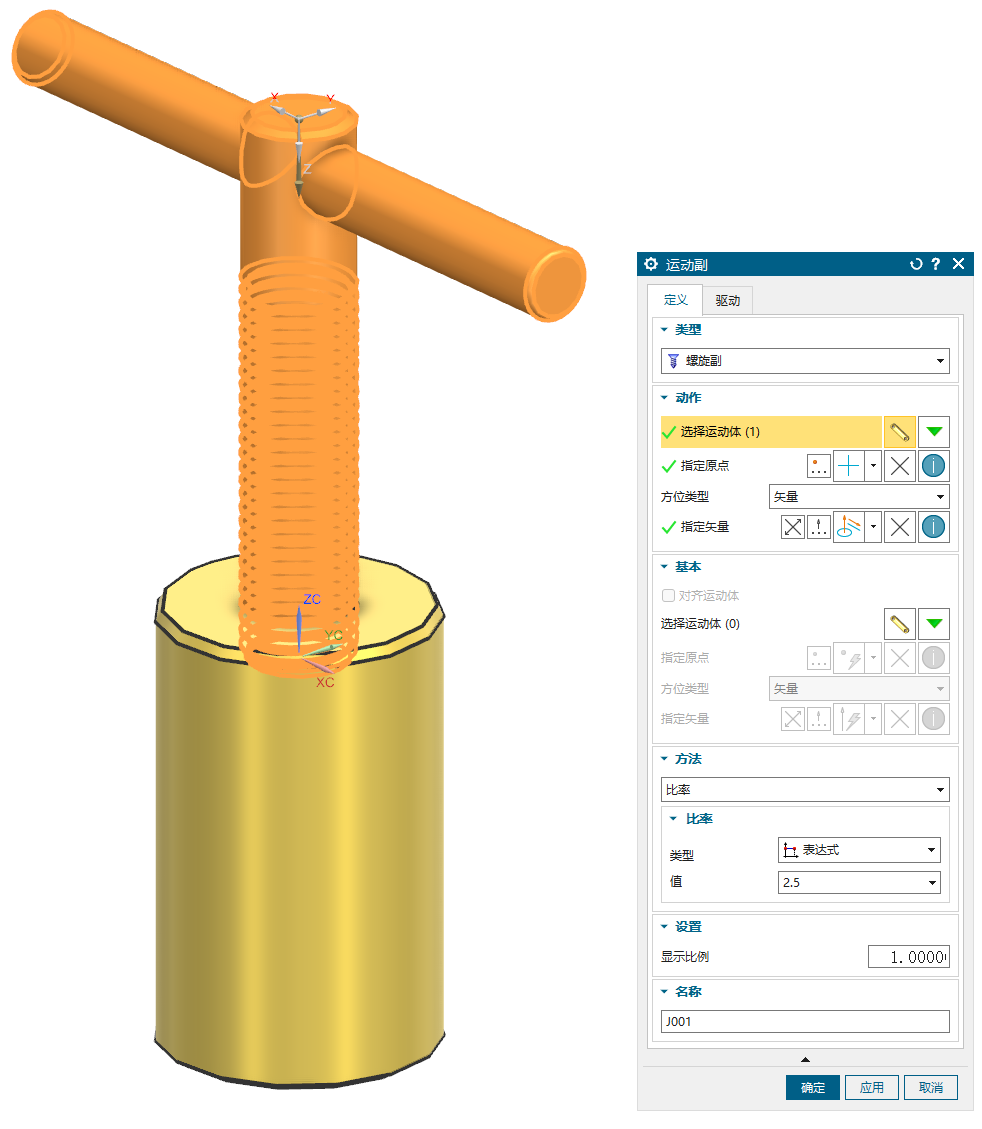
T型丝锥手柄
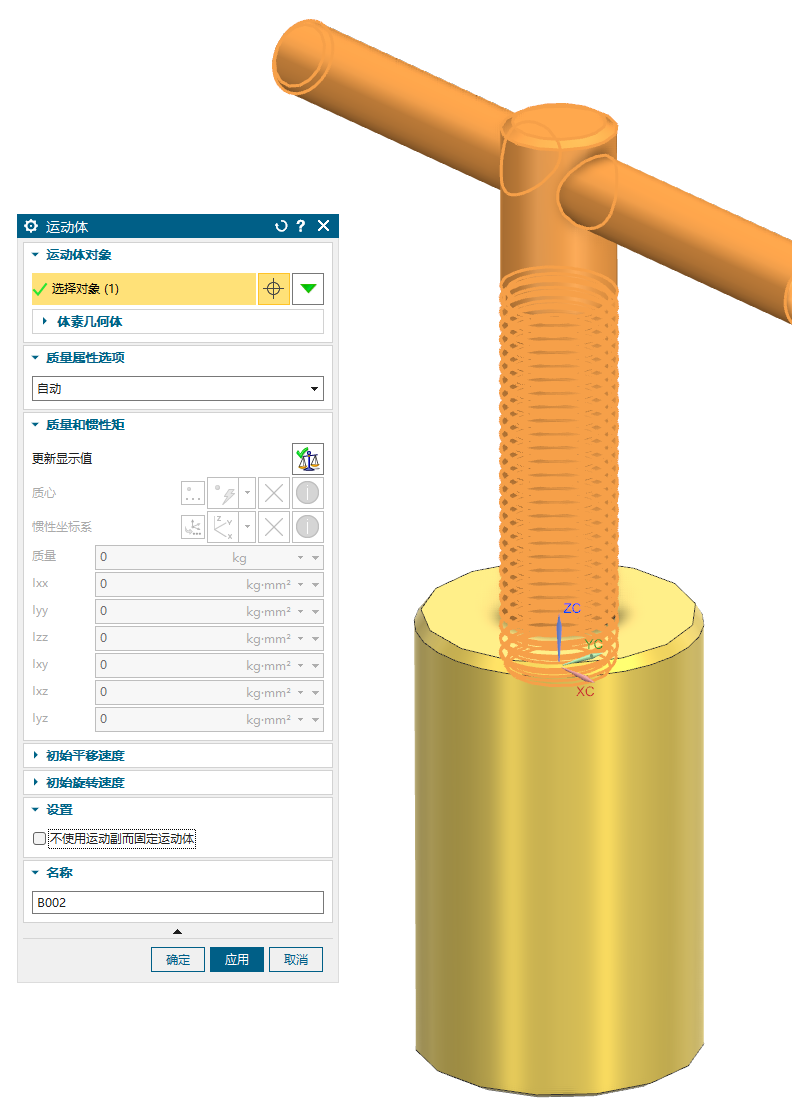
被攻丝部分设置为固定运动体

丝锥手柄设置为运动体
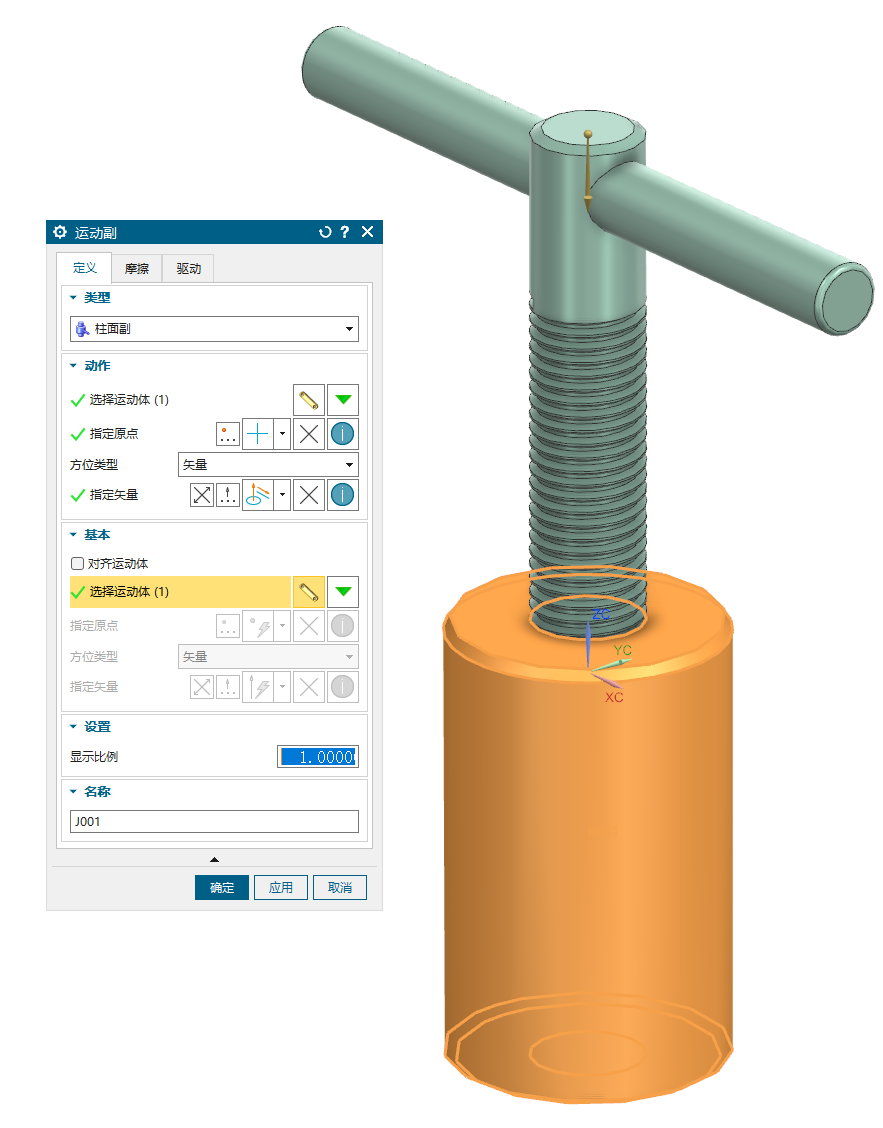
创建柱面副
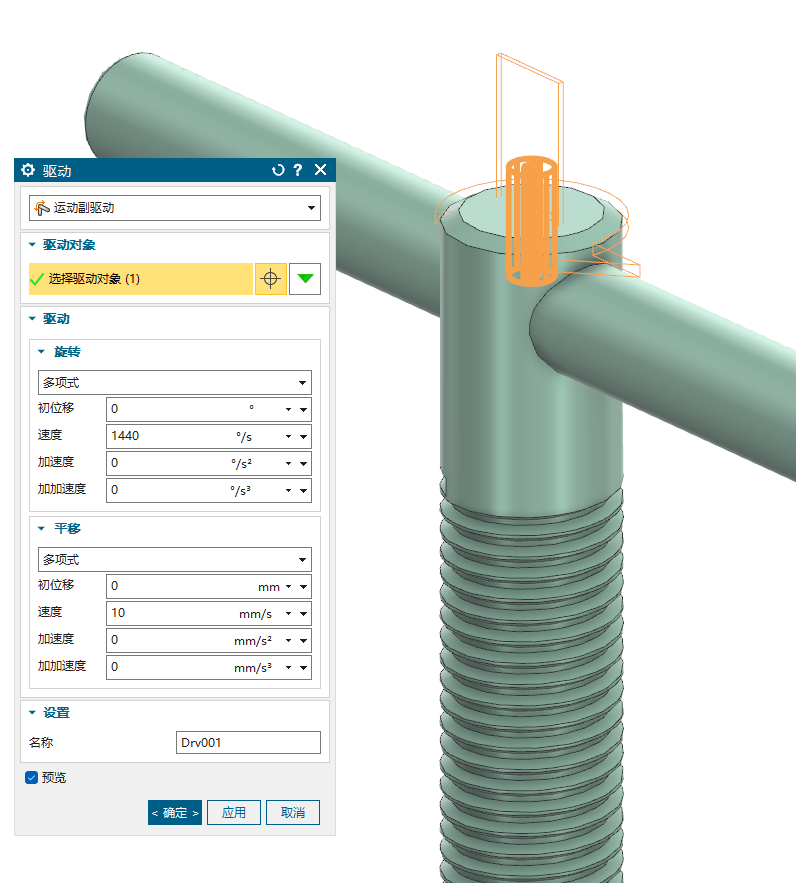
创建驱动
这是 M20x2.5 的螺纹
设定每秒转 4 圈,即 1440°,螺距 2.5,4 圈对应行进距离 10
动画
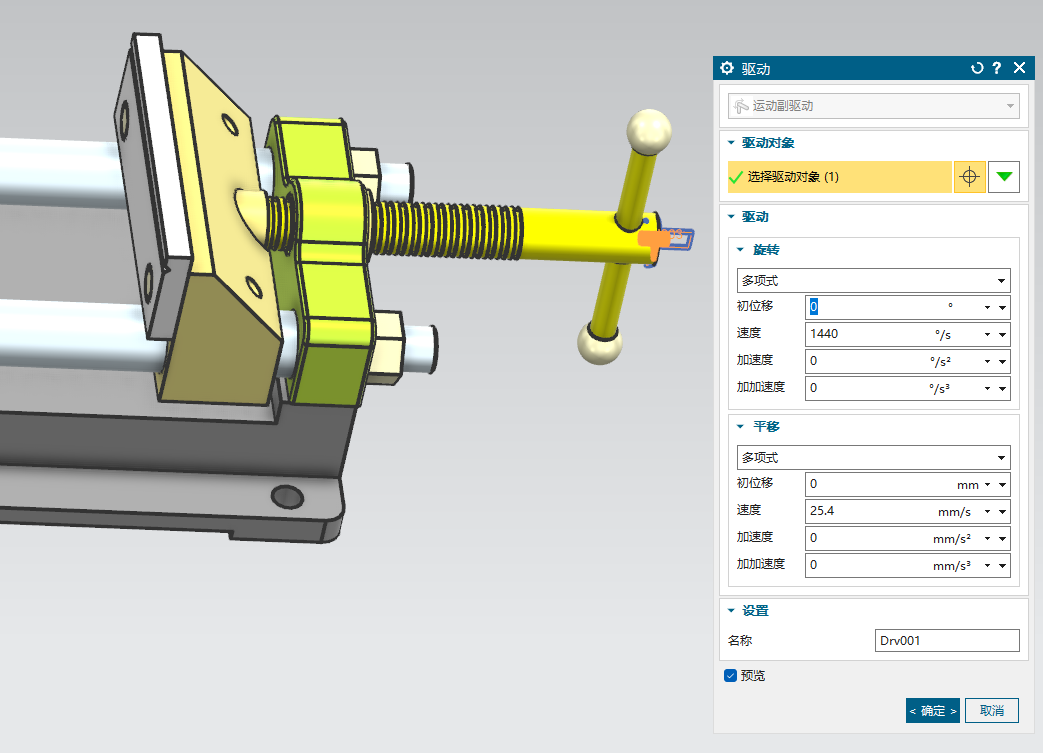
虎钳
将活动钳口 2 个零件和 2 颗螺丝建立为一个运动体
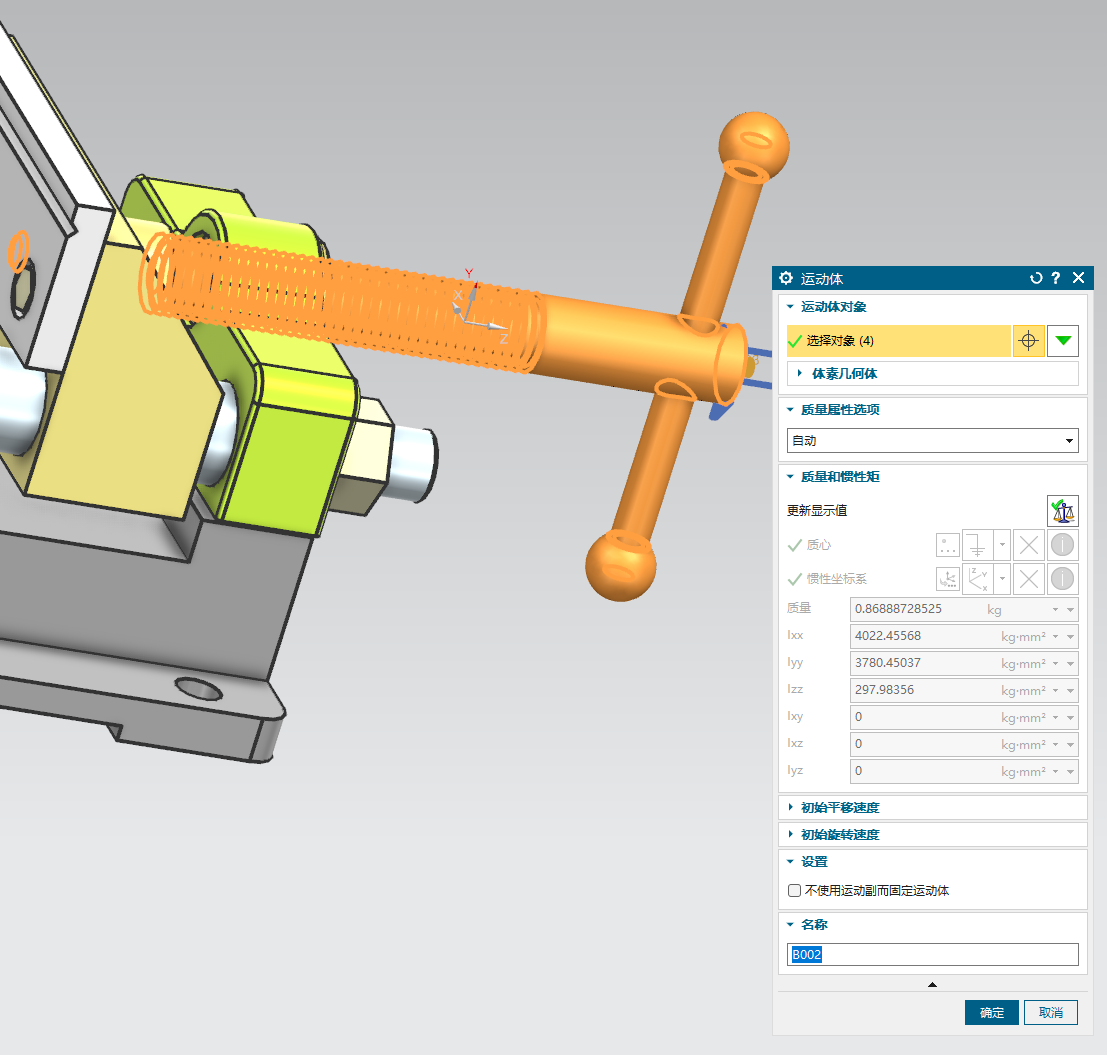
将丝杠和手柄(含2颗球)建立为一个运动体,其它零件未实际参与运动,可以不用创建运动体
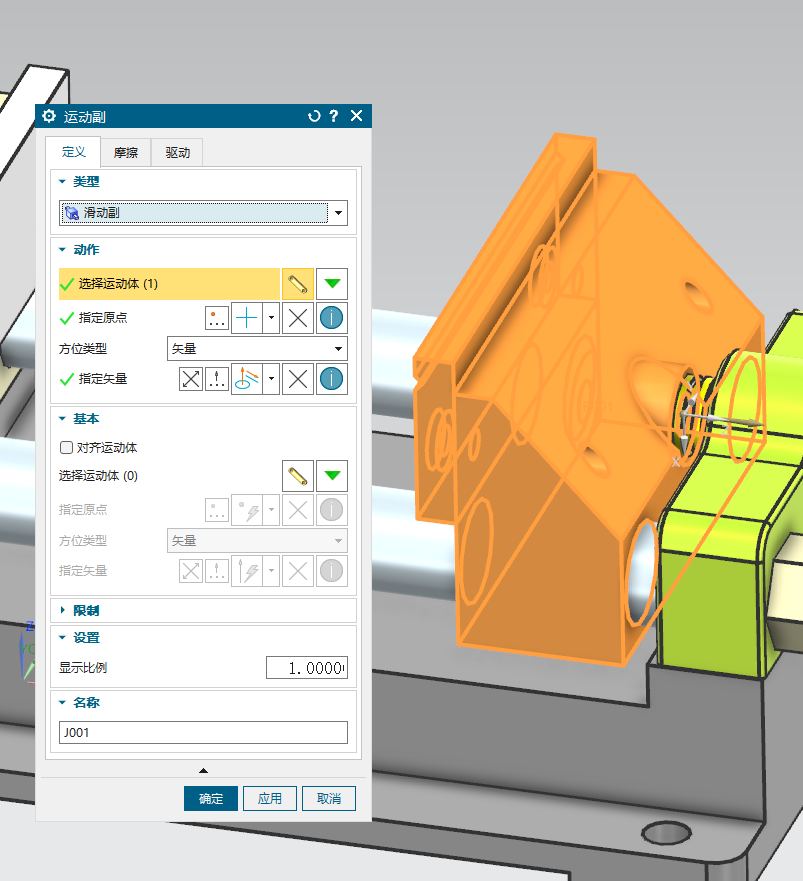
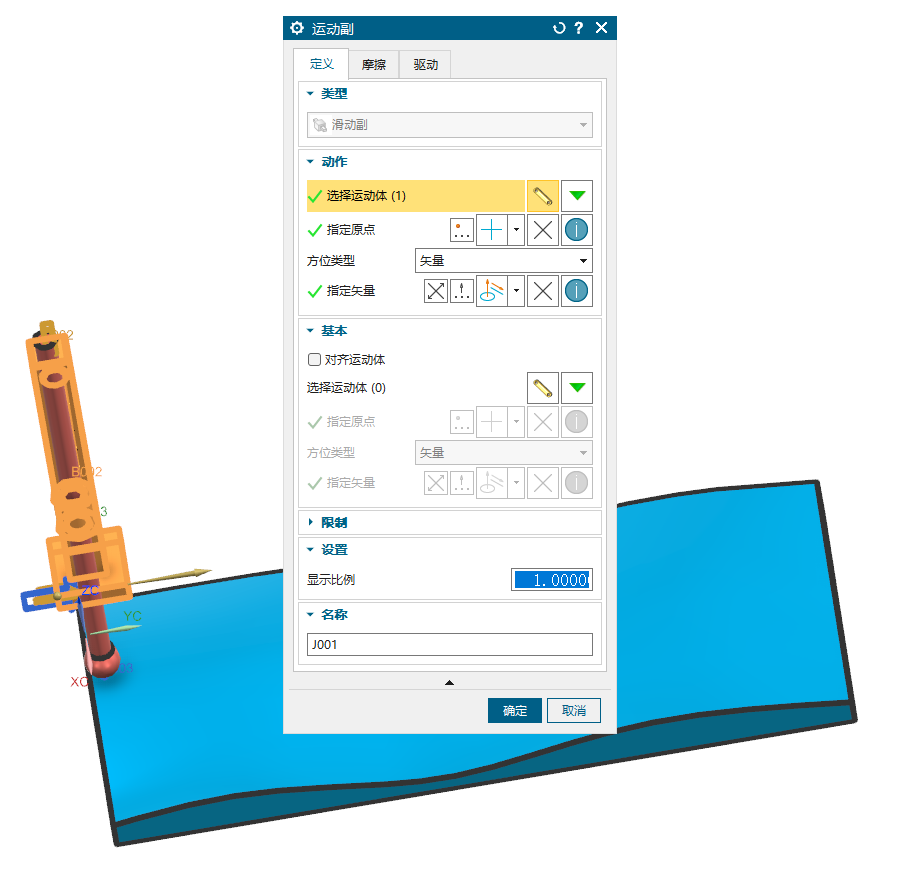
活动钳口创建为滑动副,基本运动体可以不用指定,不指定时基本运动体默认是绝对空间位置,即相当于是机架
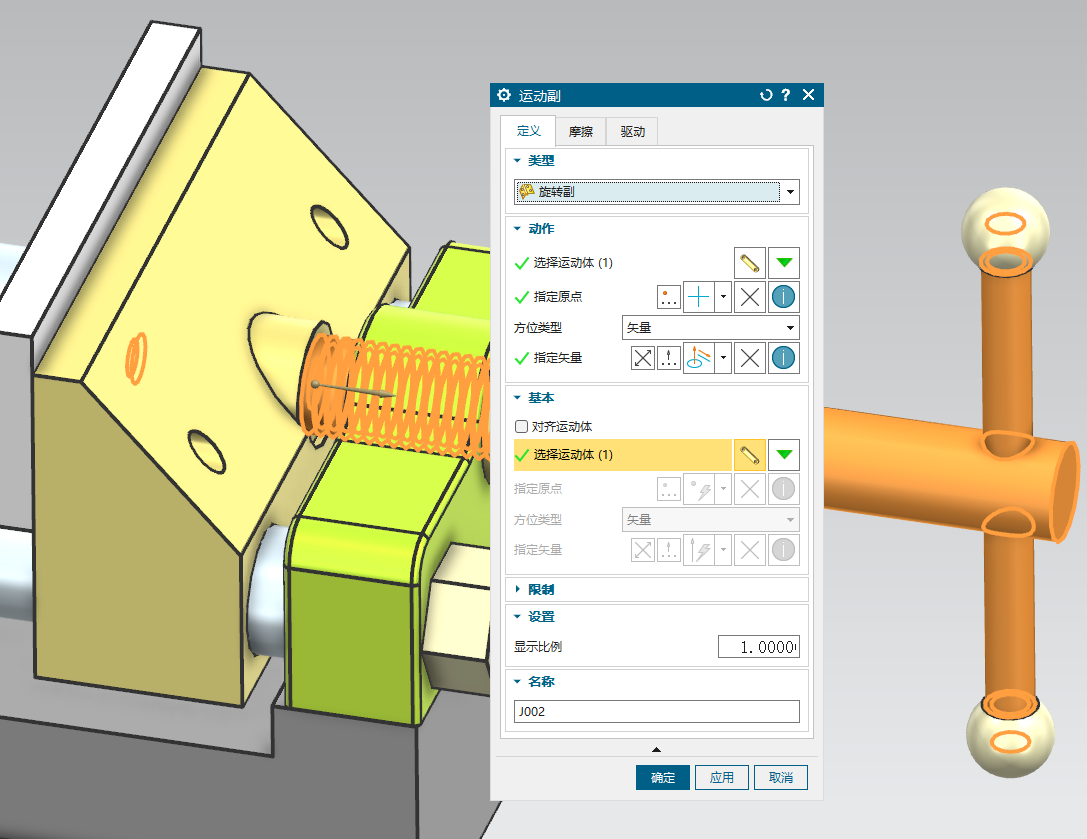
创建旋转副
活动钳口为动作运动体,丝锥为基本运动体
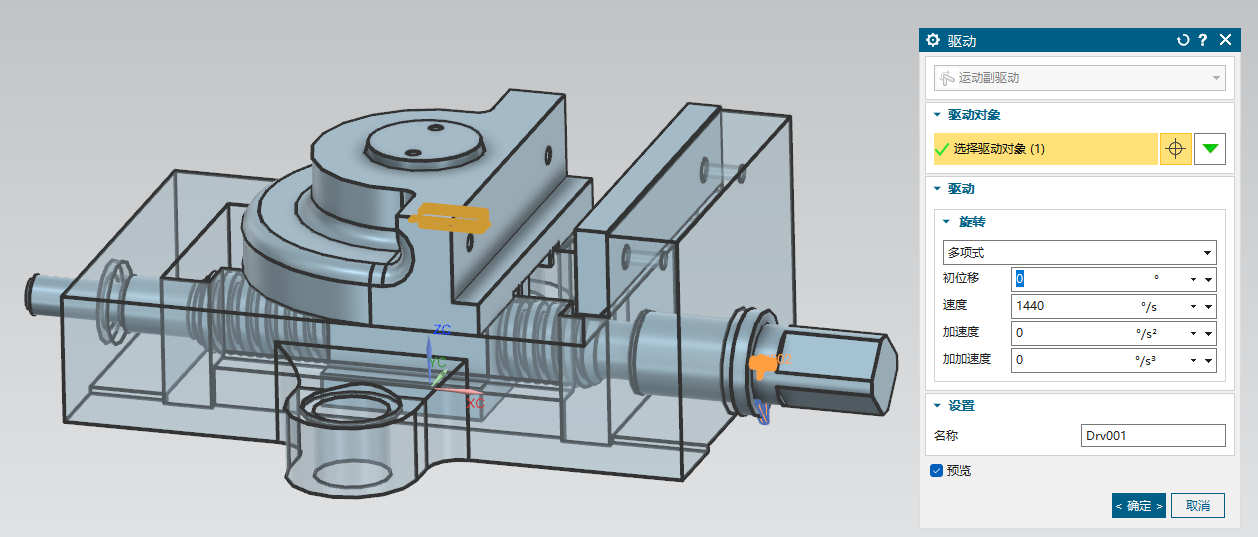
为丝杆创建柱面副
为柱面副创建驱动
每秒 4 圈,即 1440°,这里丝杆螺距是 6.35,4 圈行进距离 25.4
动画
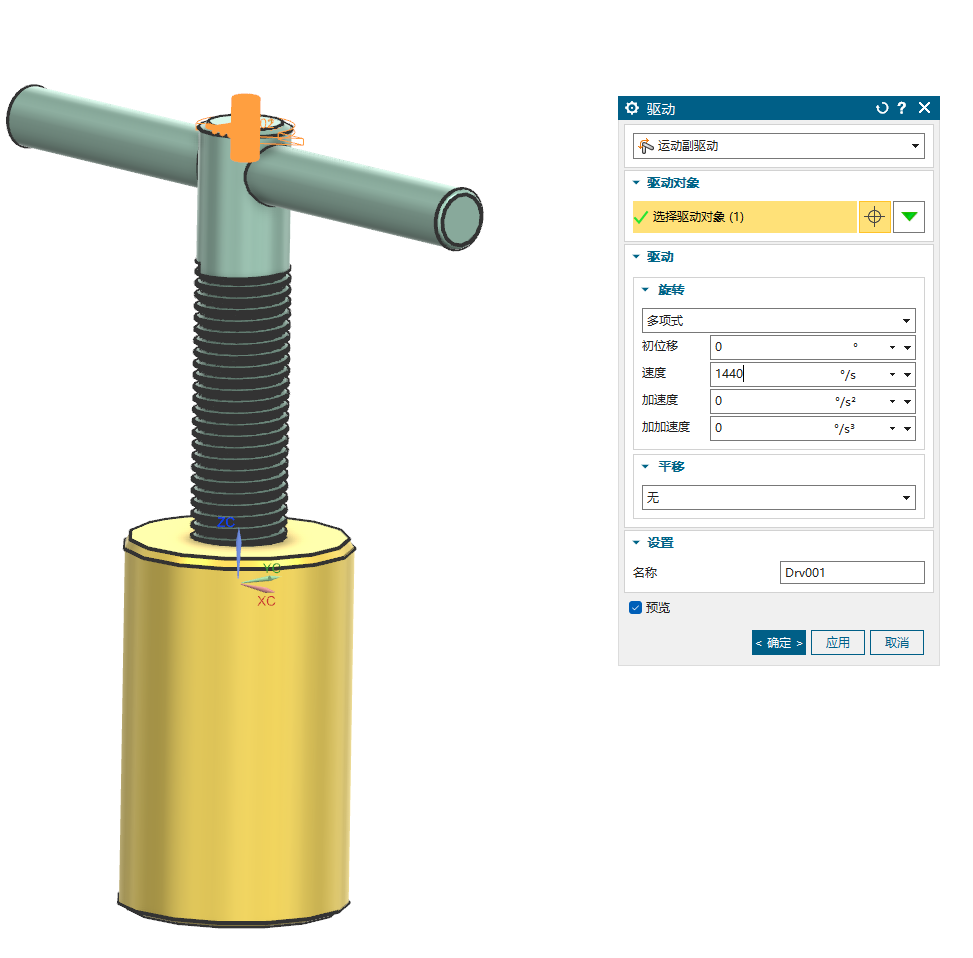
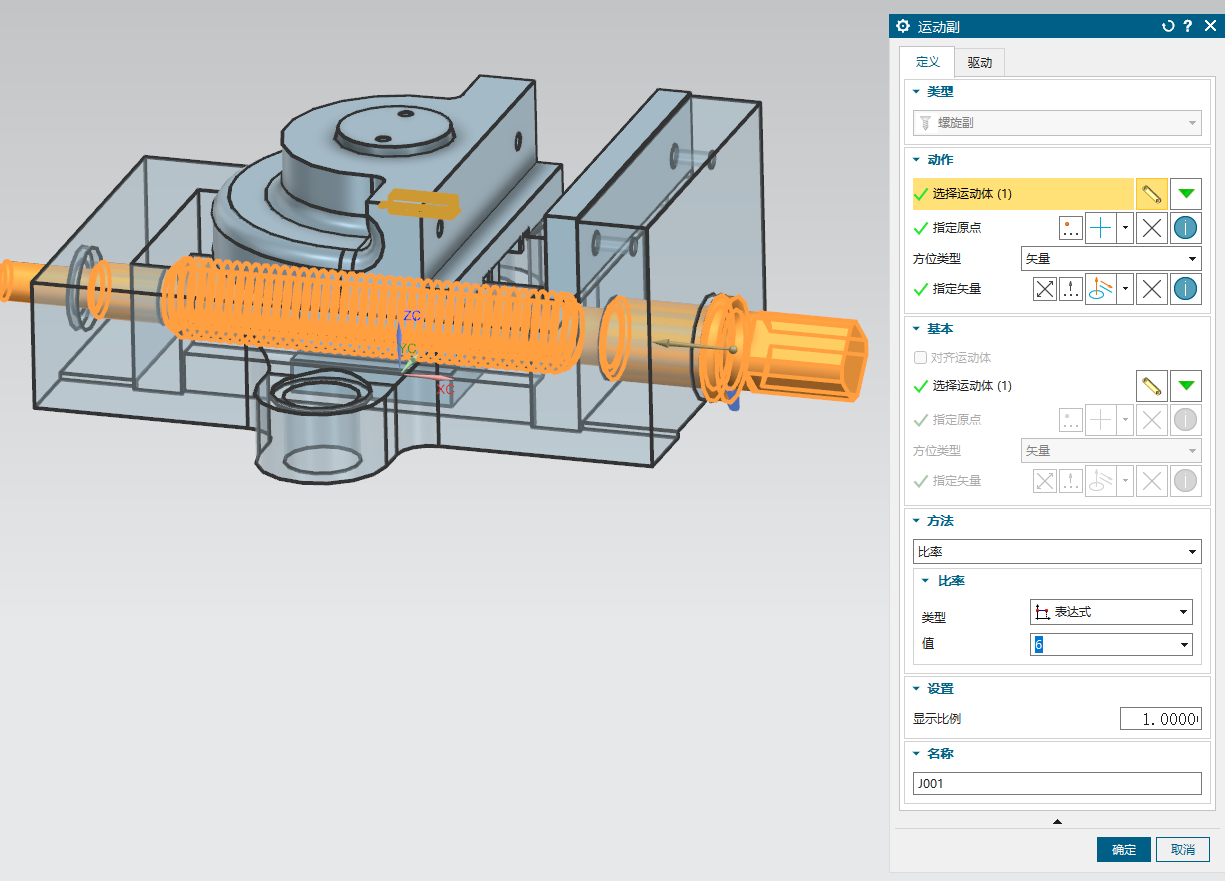
螺旋副
这里还是使用 T型丝锥手柄 的模型,直接使用柱面副的时候需要同时指定旋转角度和移动距离。使用螺旋副则可以指定比例(其实就是螺距),螺旋副会根据旋转量和设置的比率控制行进距离。
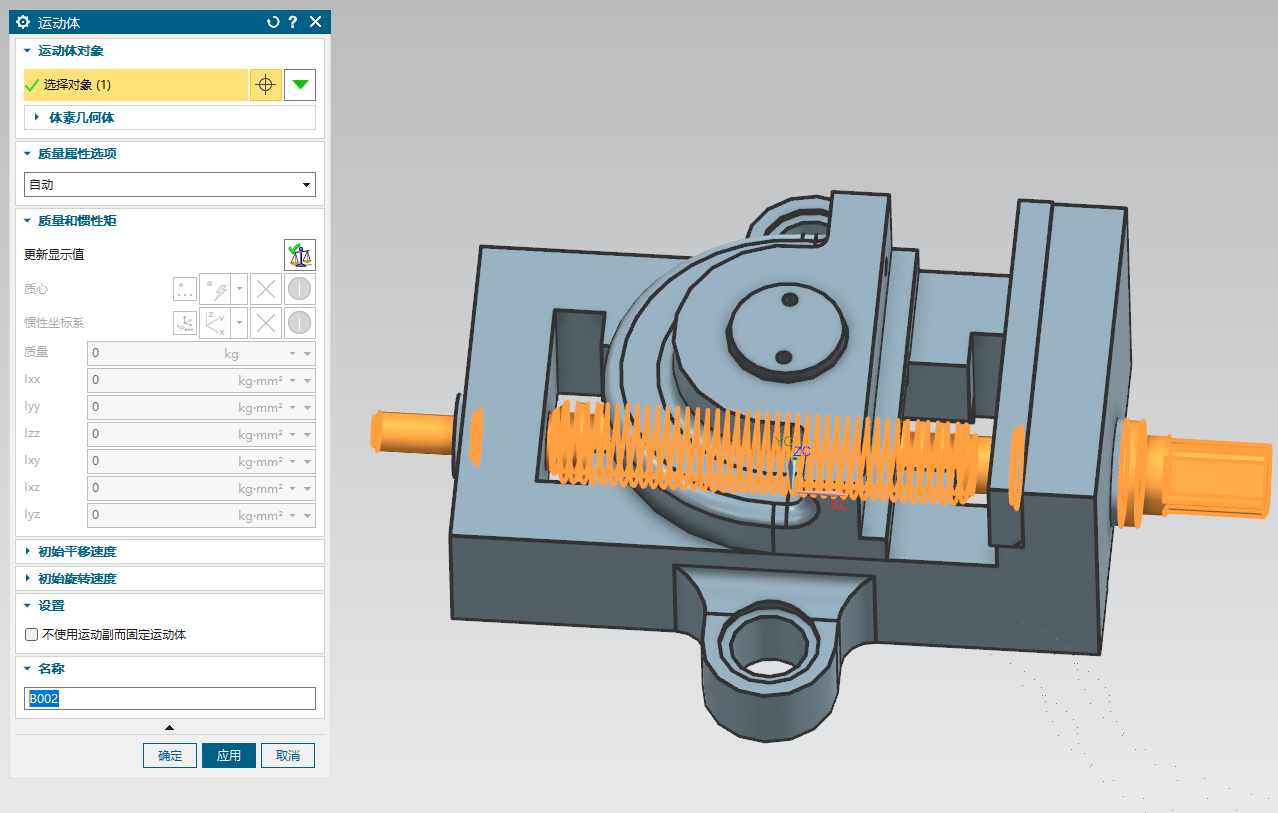
新建丝锥为运动体
创建螺旋副
这里丝锥螺距 2.5,指定比率 2.5
创建驱动
指定旋转速度 1440°/s,平移距离不指定时会根据设置的比率计算,指定了则按设置值执行
动画
虎钳二
新建仿真
将活动钳口的 3 个零件创建为一个运动体
将丝杠创建为运动体
创建螺旋副
螺距为 6
创建旋转副
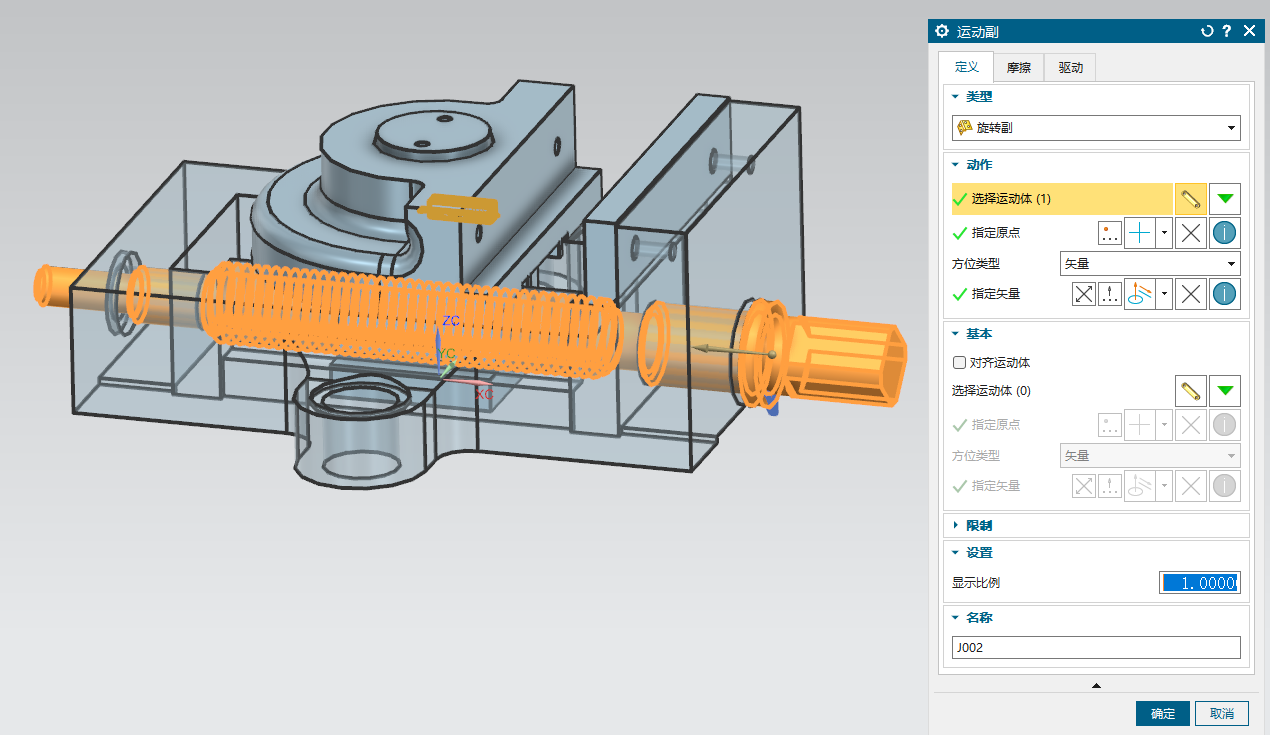
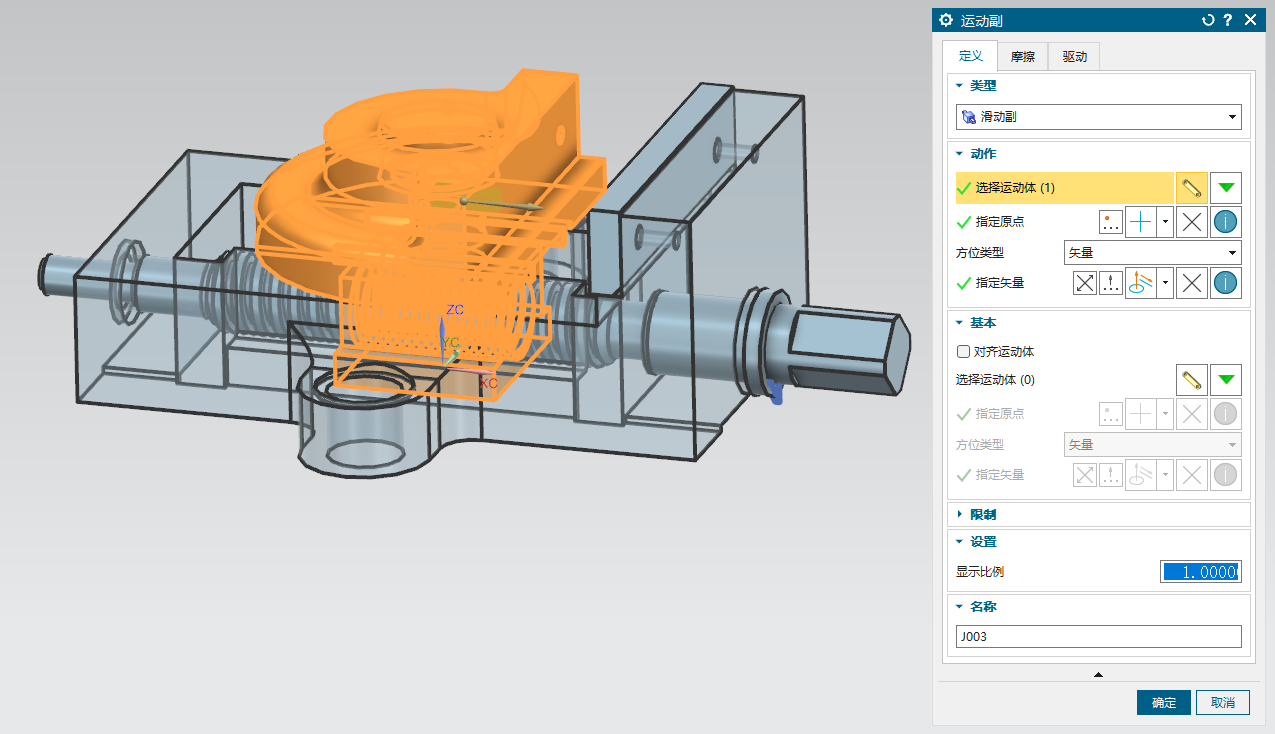
创建滑动副
选择一条在需要的运动方向上的边线
为旋转副创建驱动
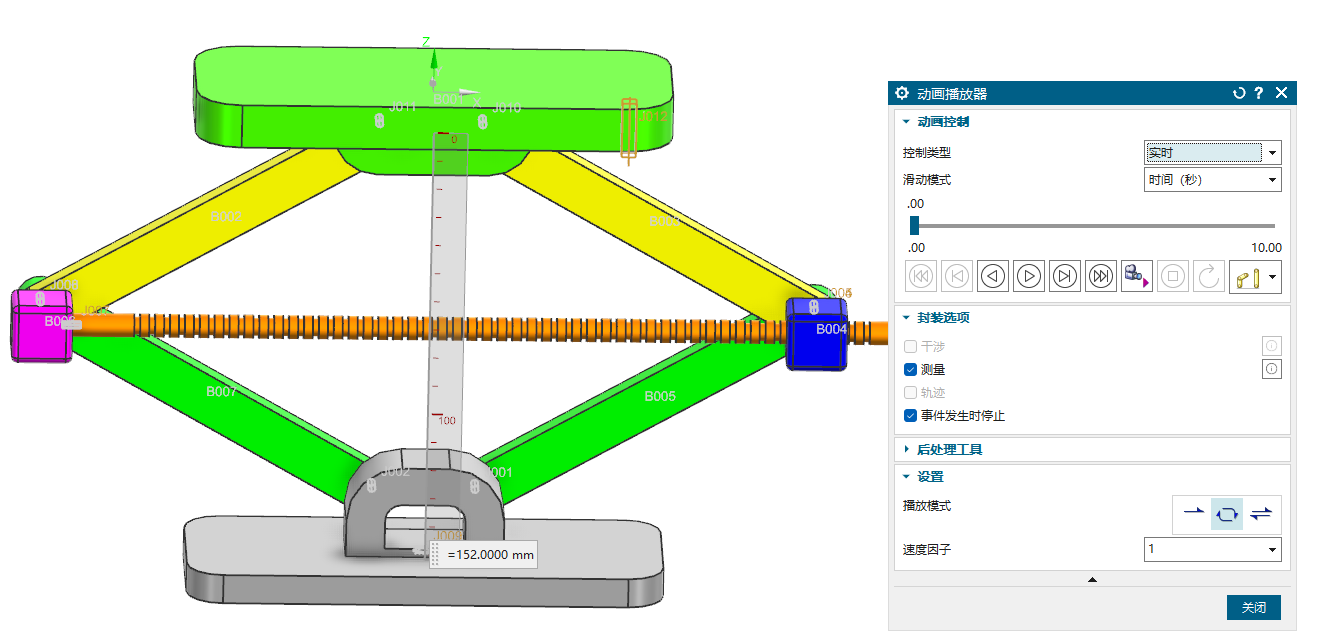
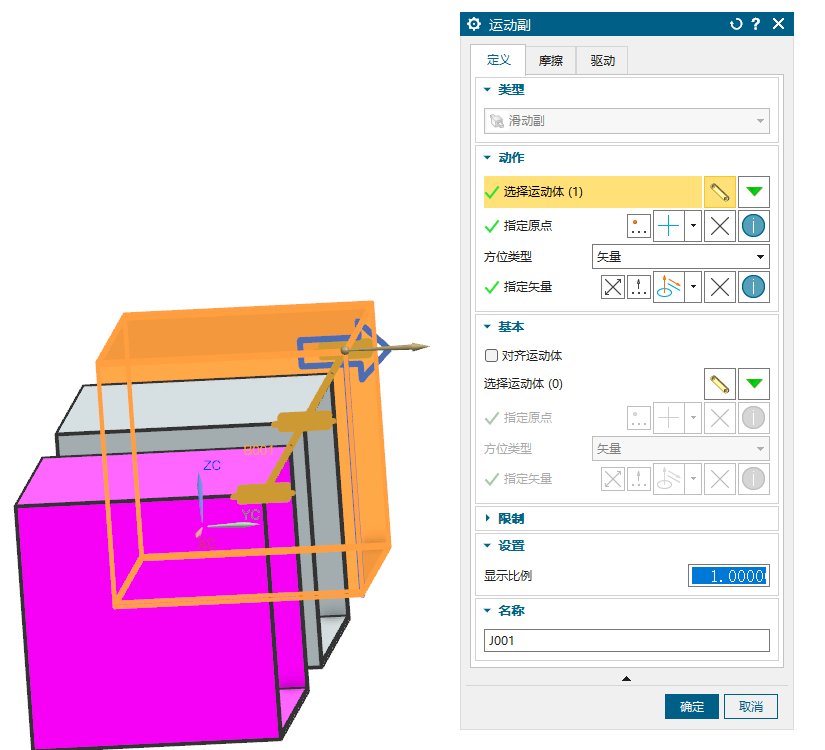
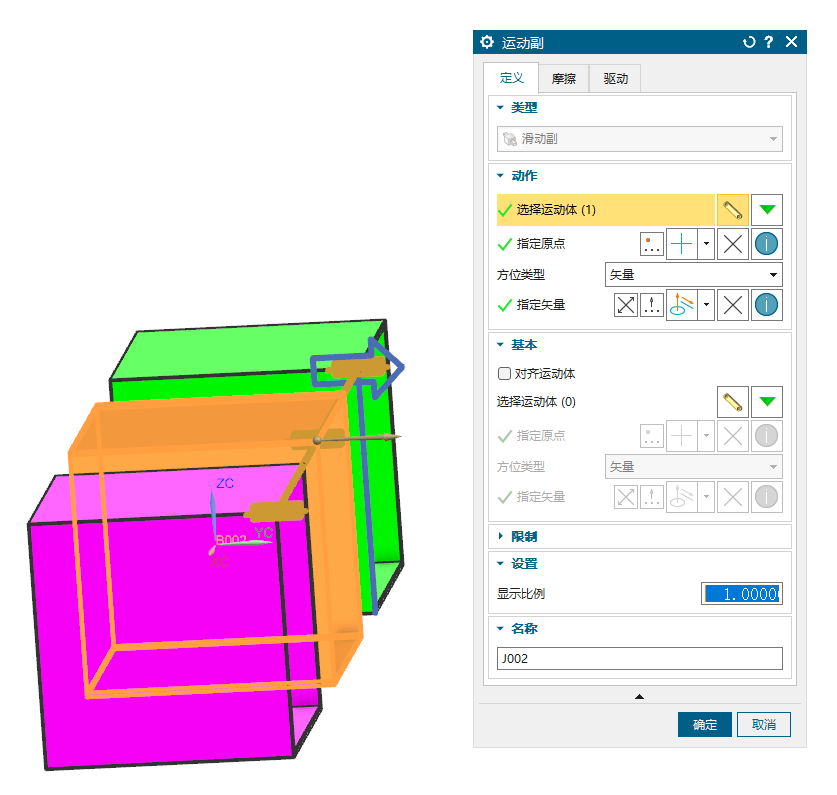
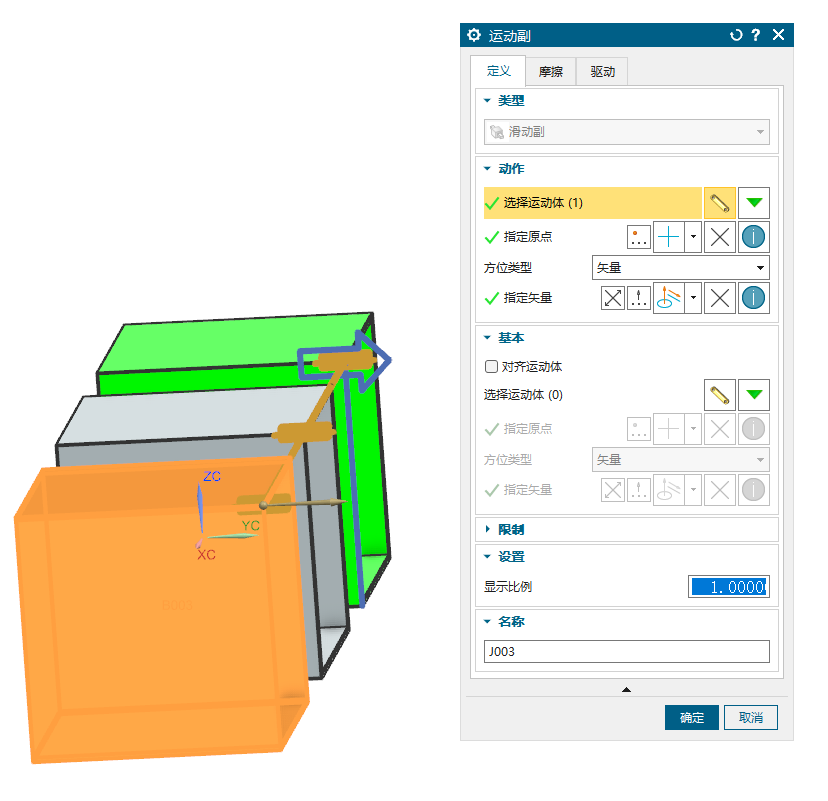
剪式千斤顶 & 动画测量
橙色丝杠和蓝色块之间用螺旋副,绿色承载座使用滑动副,其它零件两两之间都用旋转副
打开动画测量
这里测量承载座和底座的距离,可以添加阈值,达到阈值时停止动画
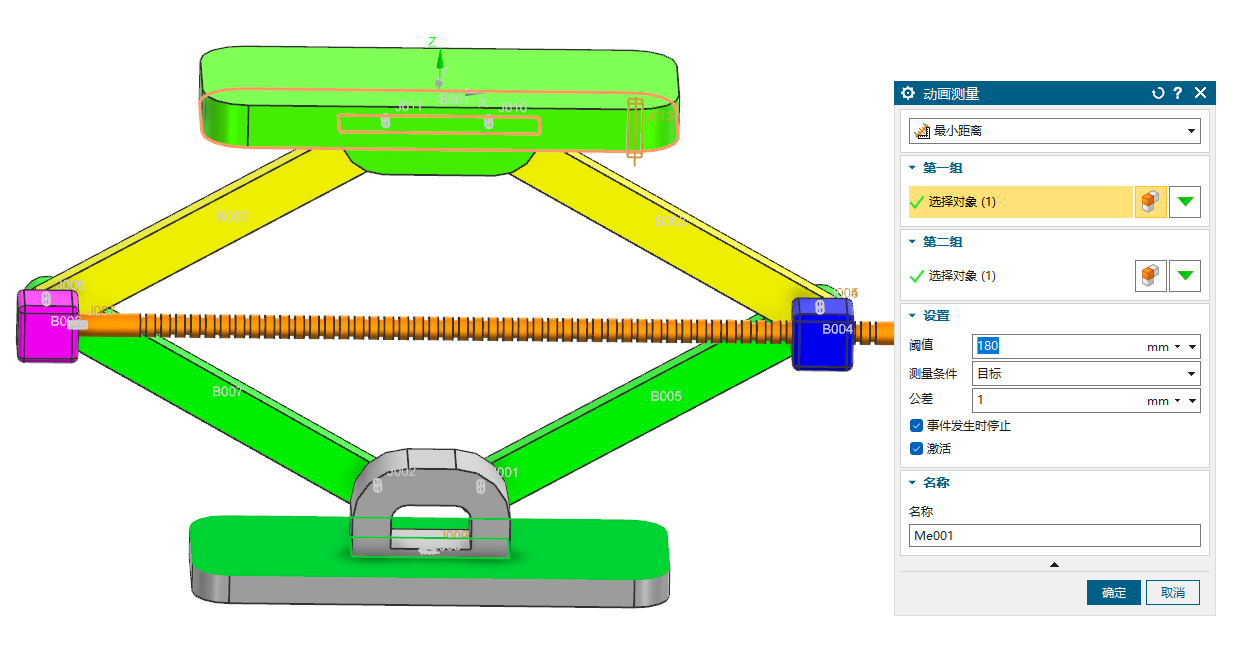
打开动画播放器,勾选测量,如果勾选事件发生时停止,那么满足阈值条件时就可以停止
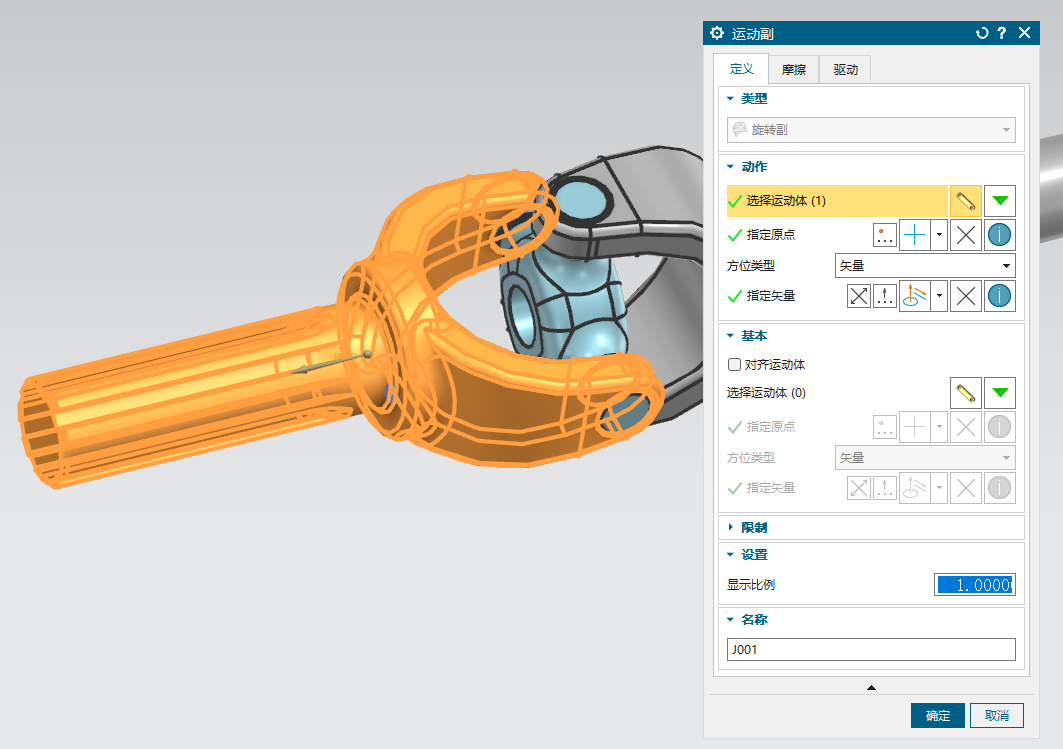
万向节
使用旋转副模拟万向节
为 3 个零件各自创建运动体
2 根轴杆都创建旋转副
分别创建万向节叉和十字轴的旋转副
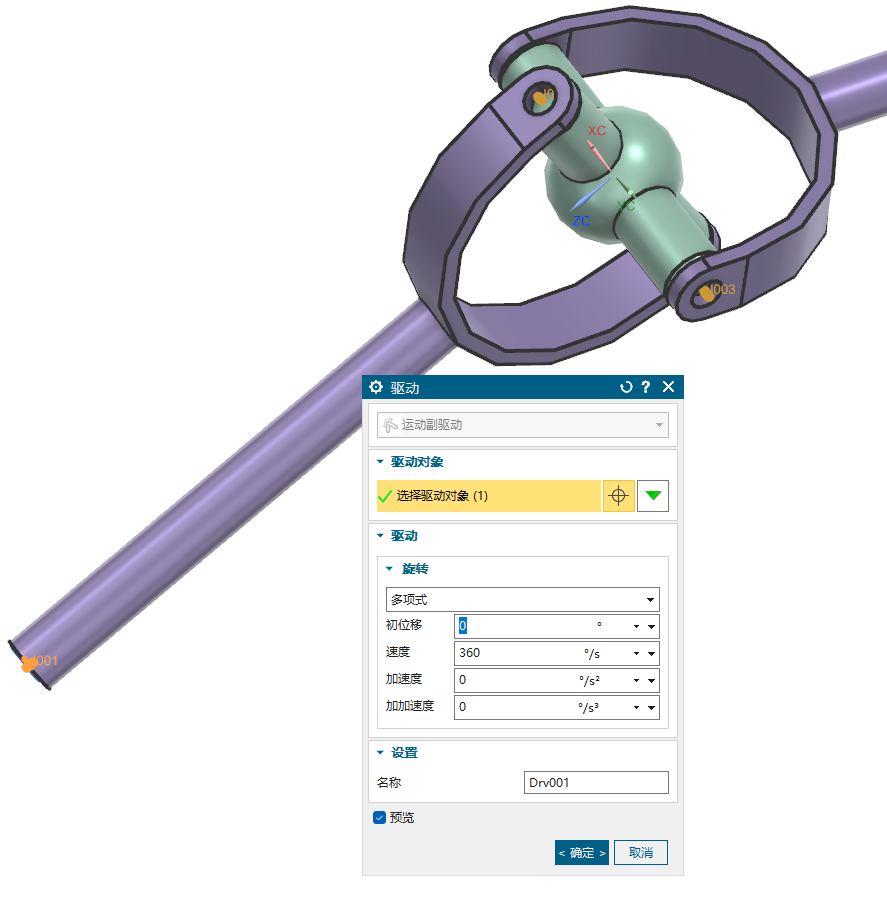
创建驱动
动画
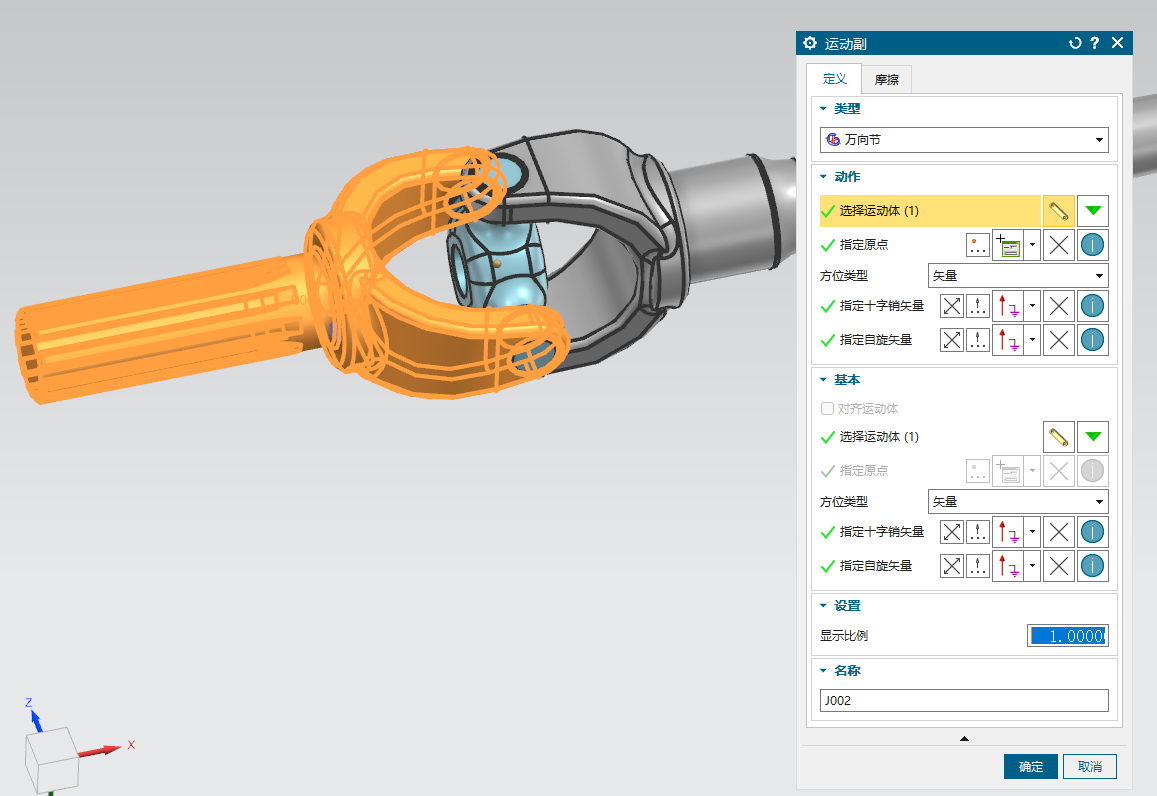
使用万向节运动副
万向节运动副可以取代十字轴,可以只创建 2 根轴作为运动体
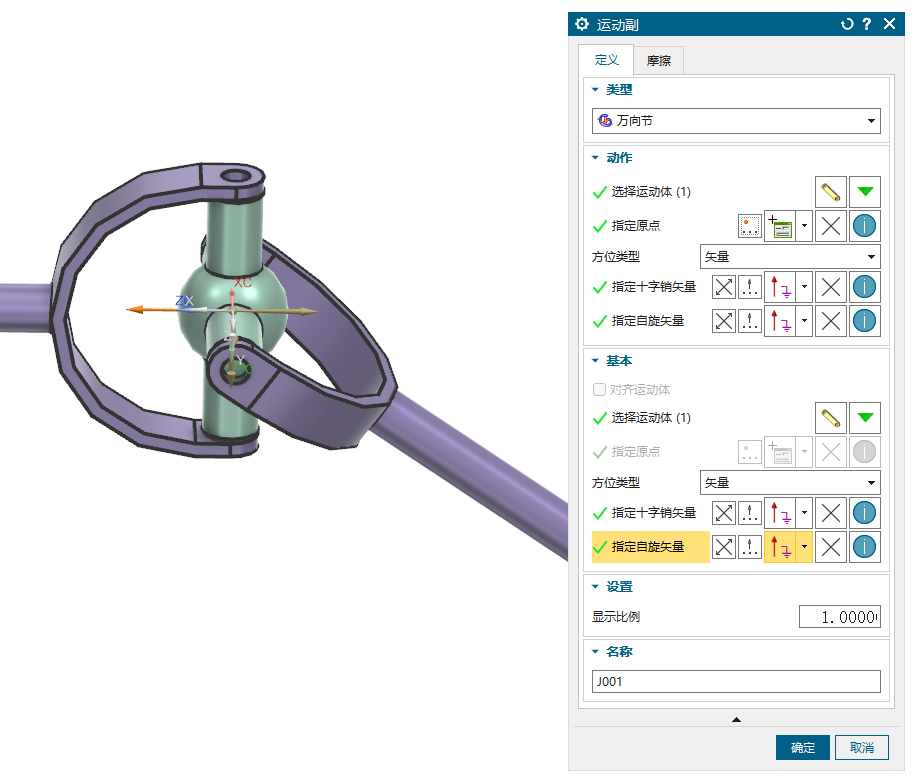
创建万向节运动副
动作组:
选择运动体,选左轴(这里称主动轴)
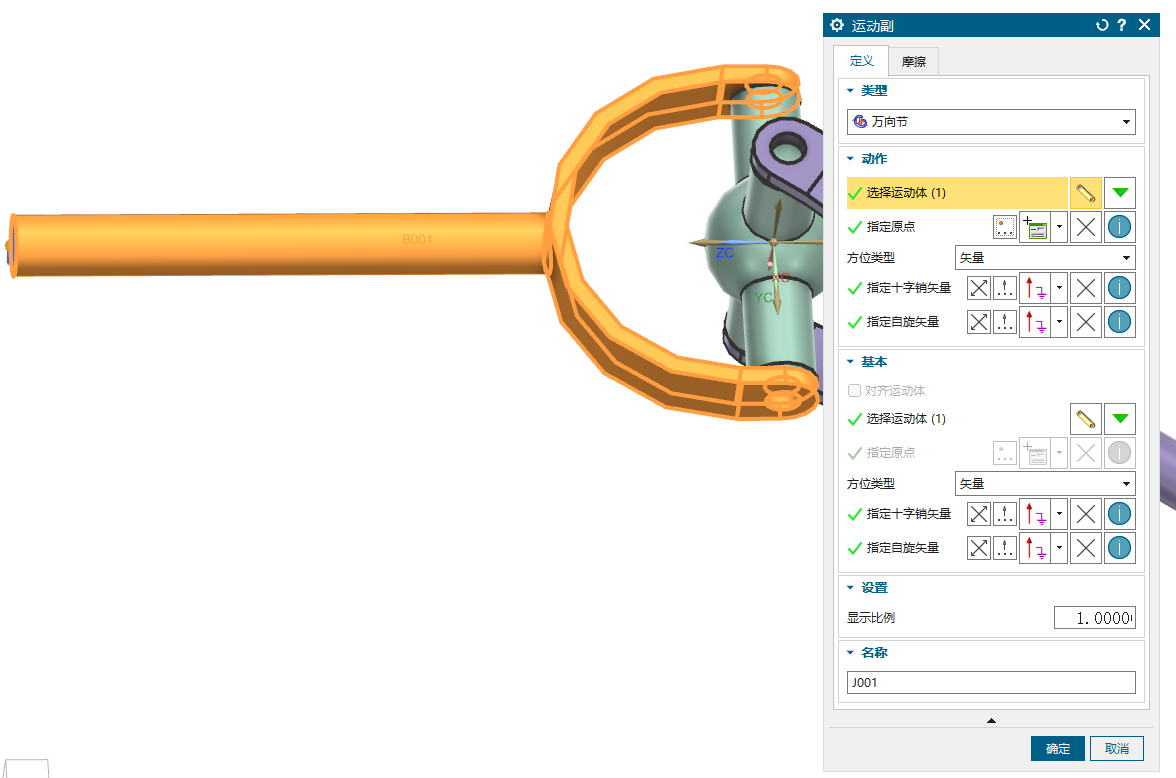
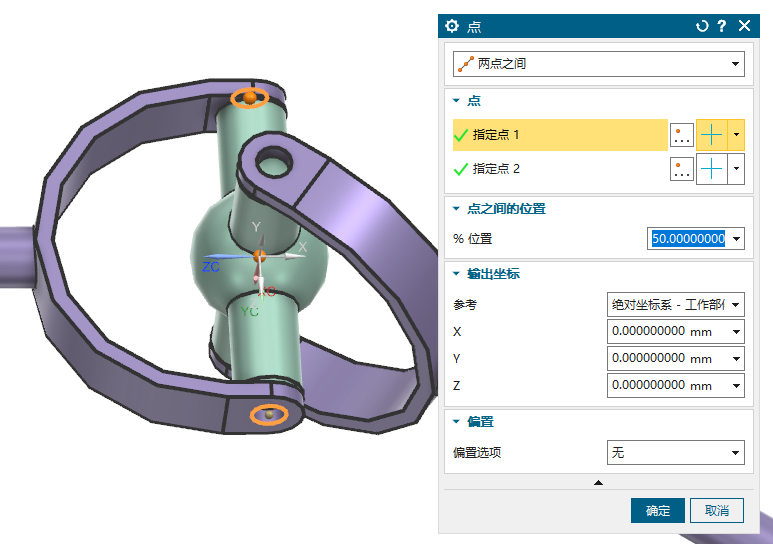
指定原点,新建点,两点之间,选主动轴叉的两个孔心,这样就得到叉的中心点,即十字轴的中心位置
指定十字销矢量,选主动轴叉的两个孔轴线连线方向
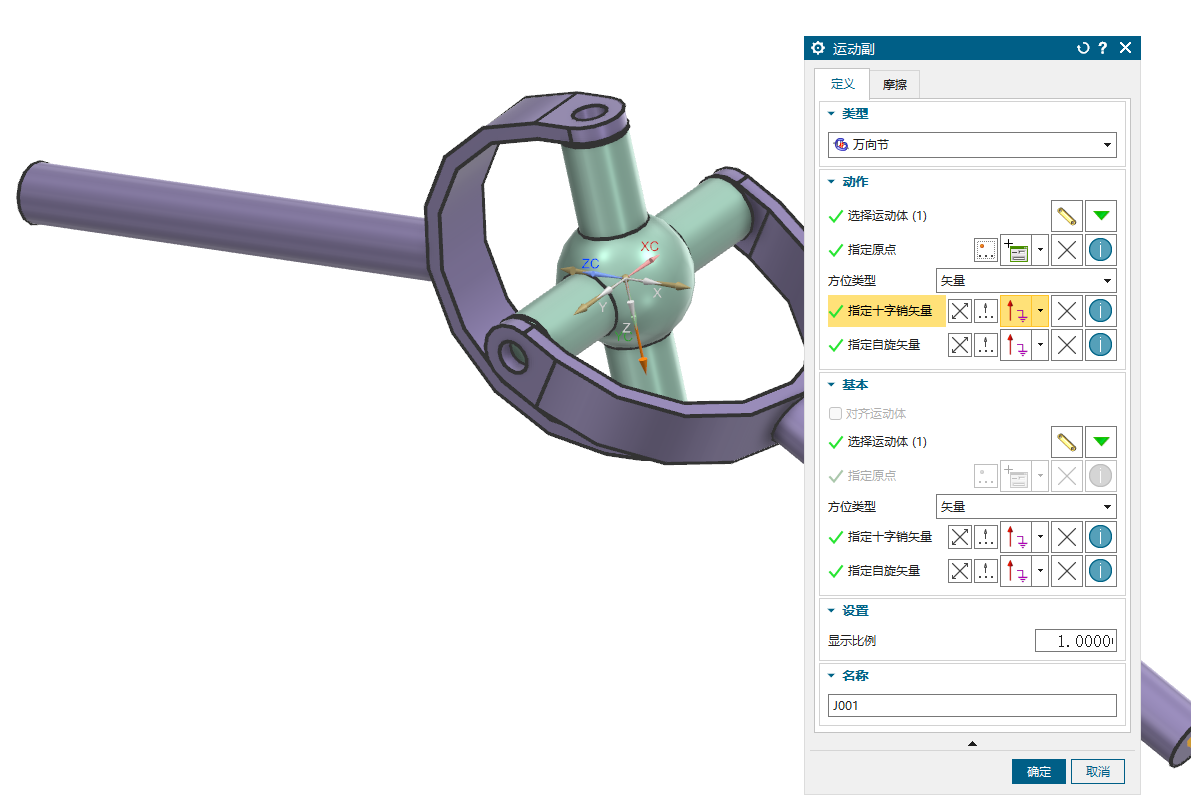
指定自旋矢量,选与十字轴的 2 条轴线都垂直的方向
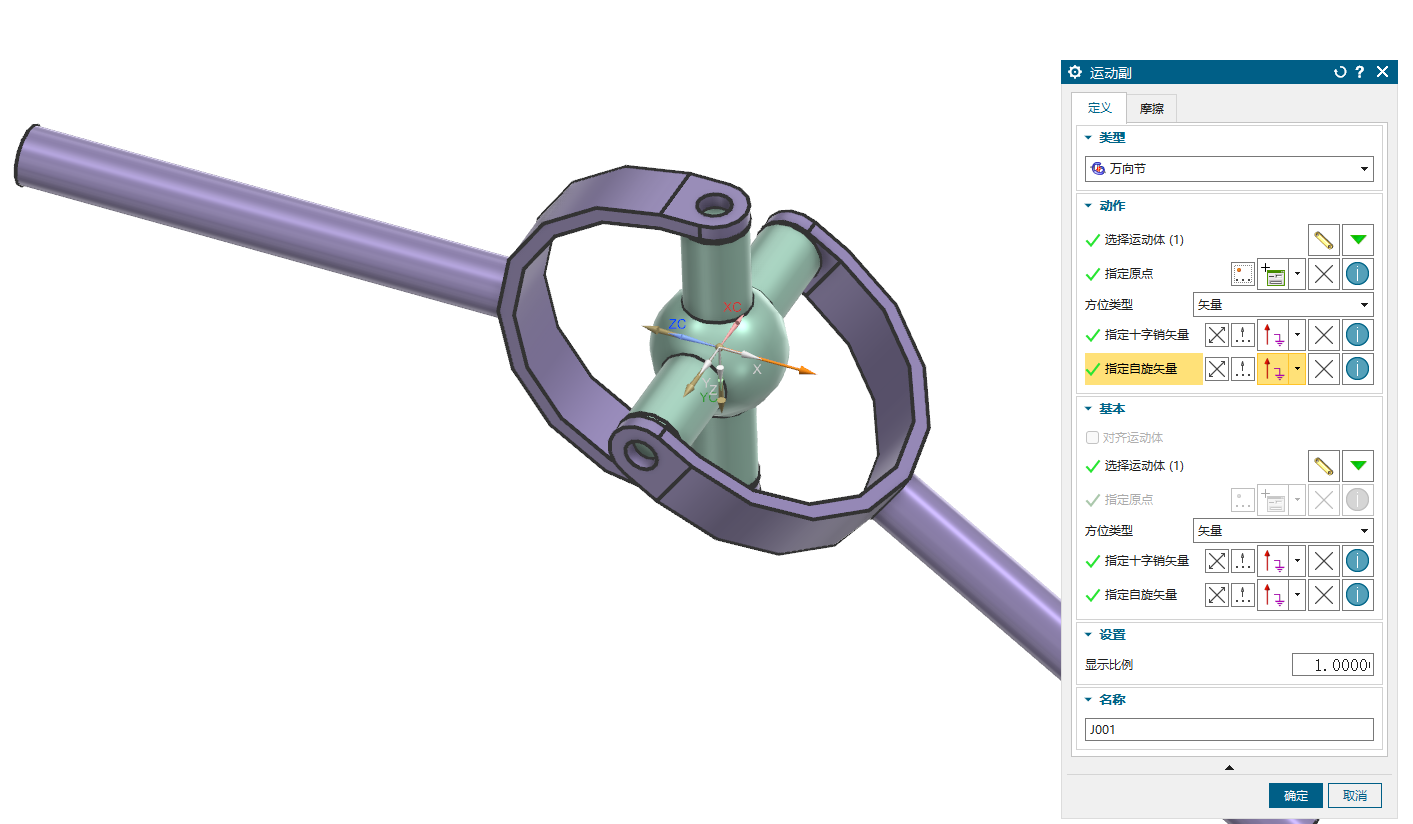
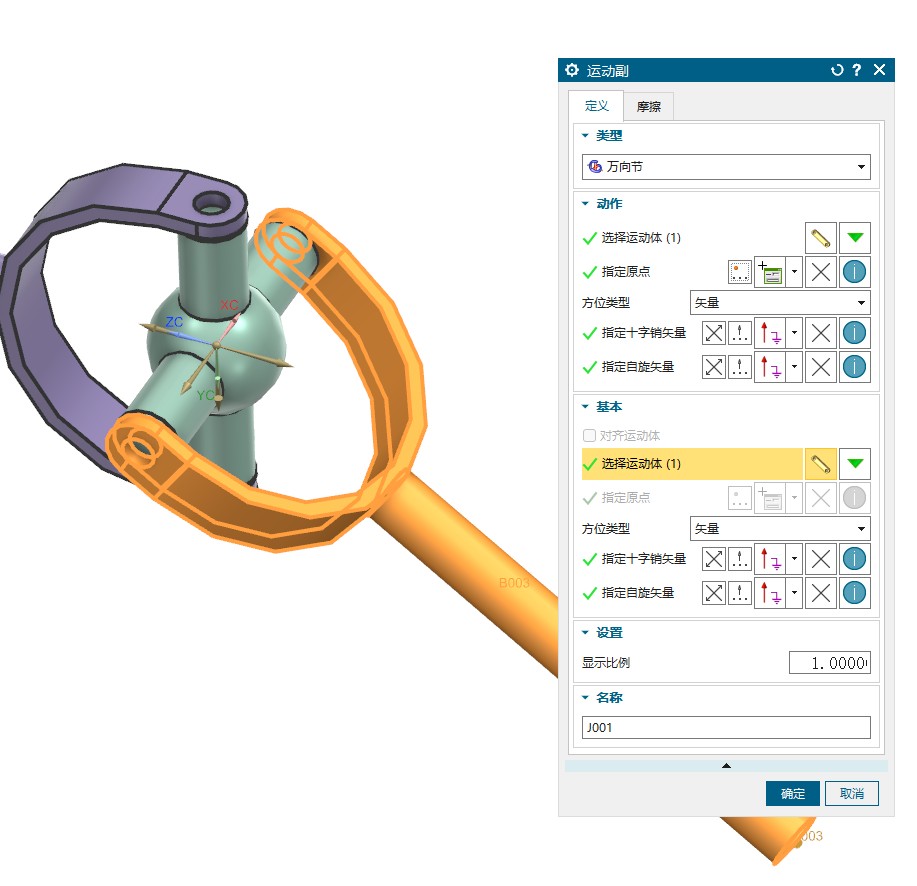
基本组:
选择运动体:选另一根轴(这里称从动轴)
指定十字销矢量,选从动轴叉的两个孔轴线连线方向
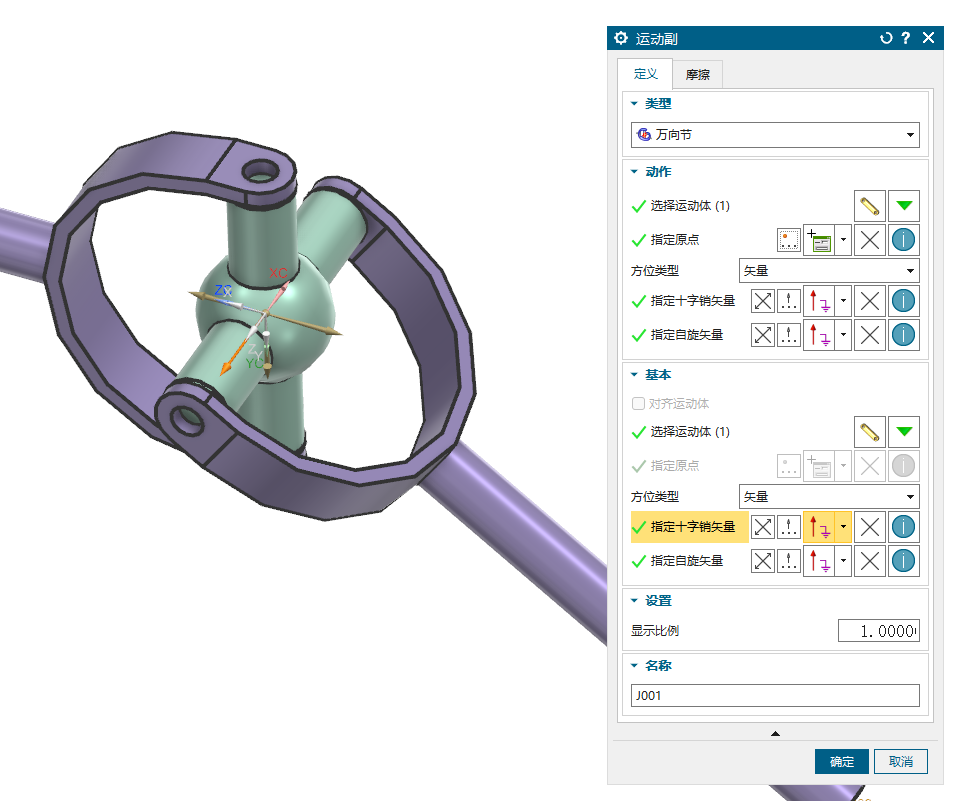
指定自旋矢量,选与十字轴的 2 条轴线都垂直的方向
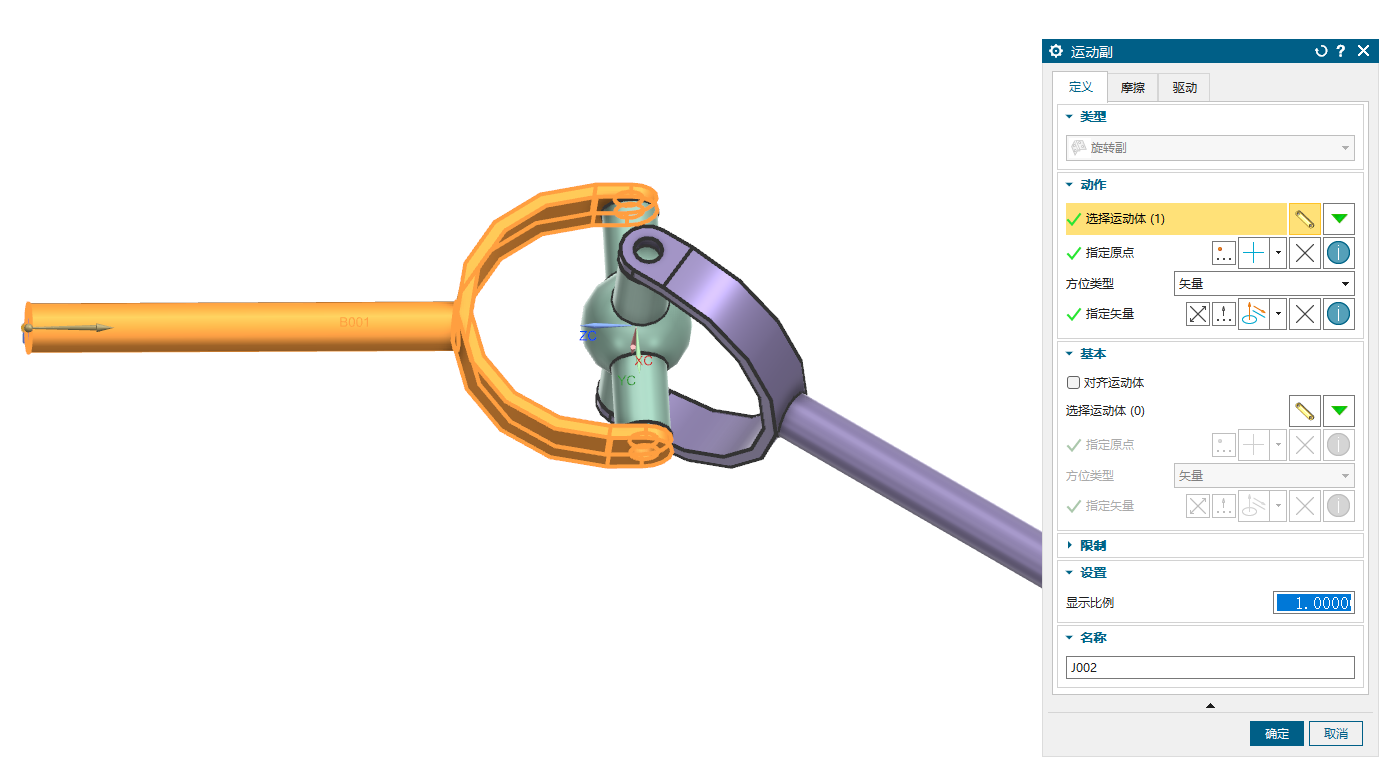
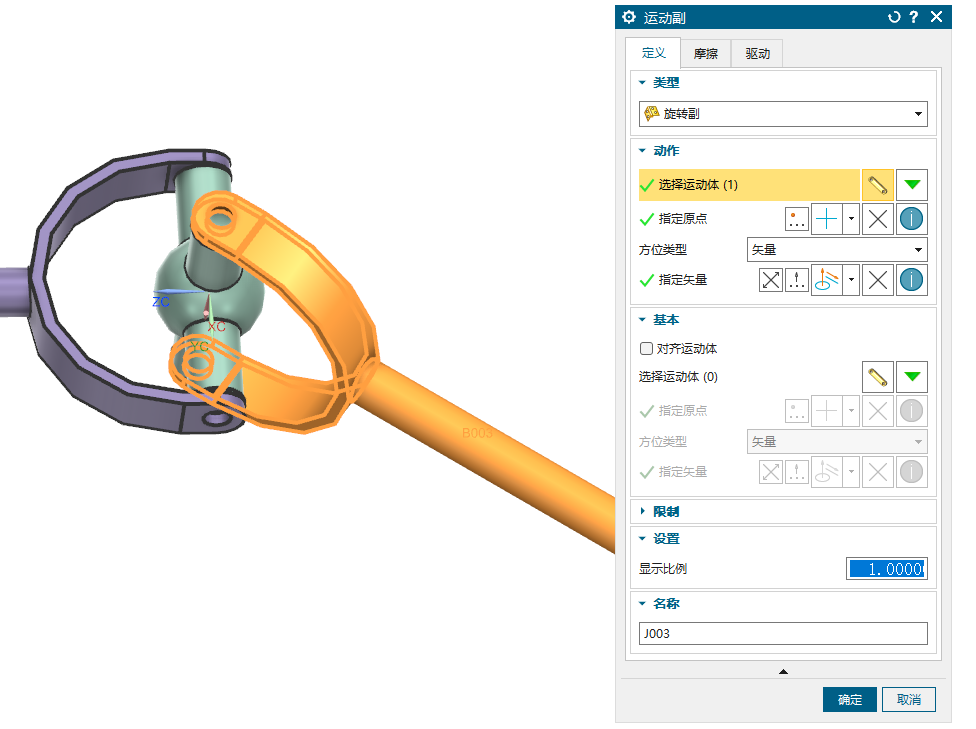
为主动轴和从动轴创建旋转副
动画
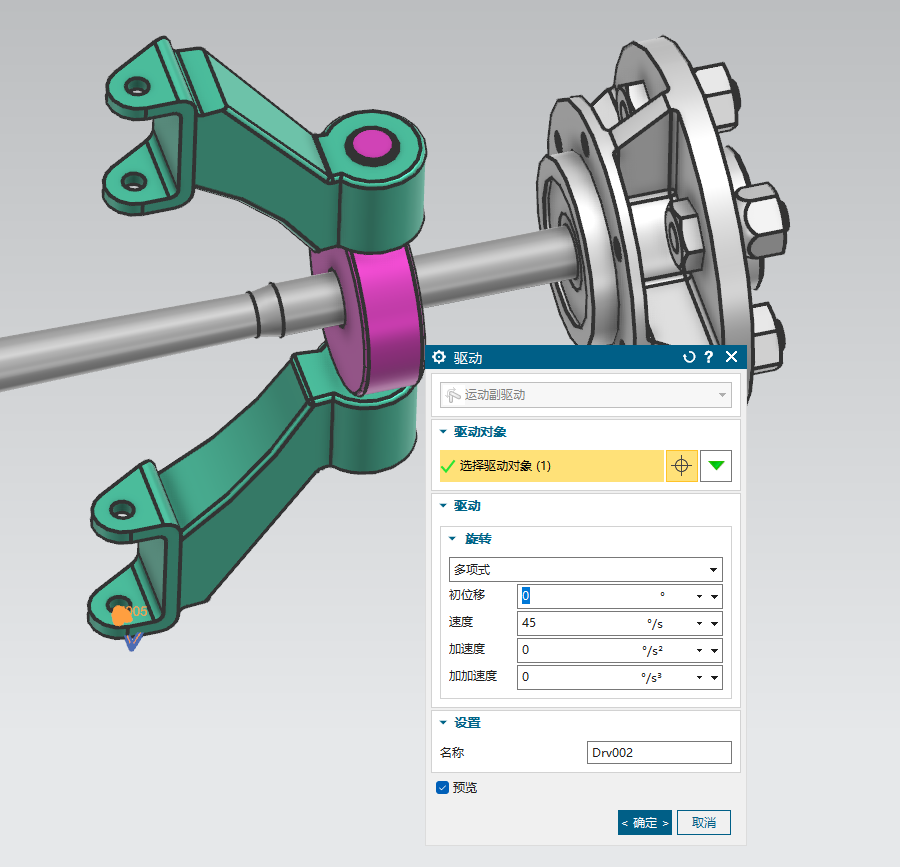
转向驱动总成
创建运动体
创建运动副
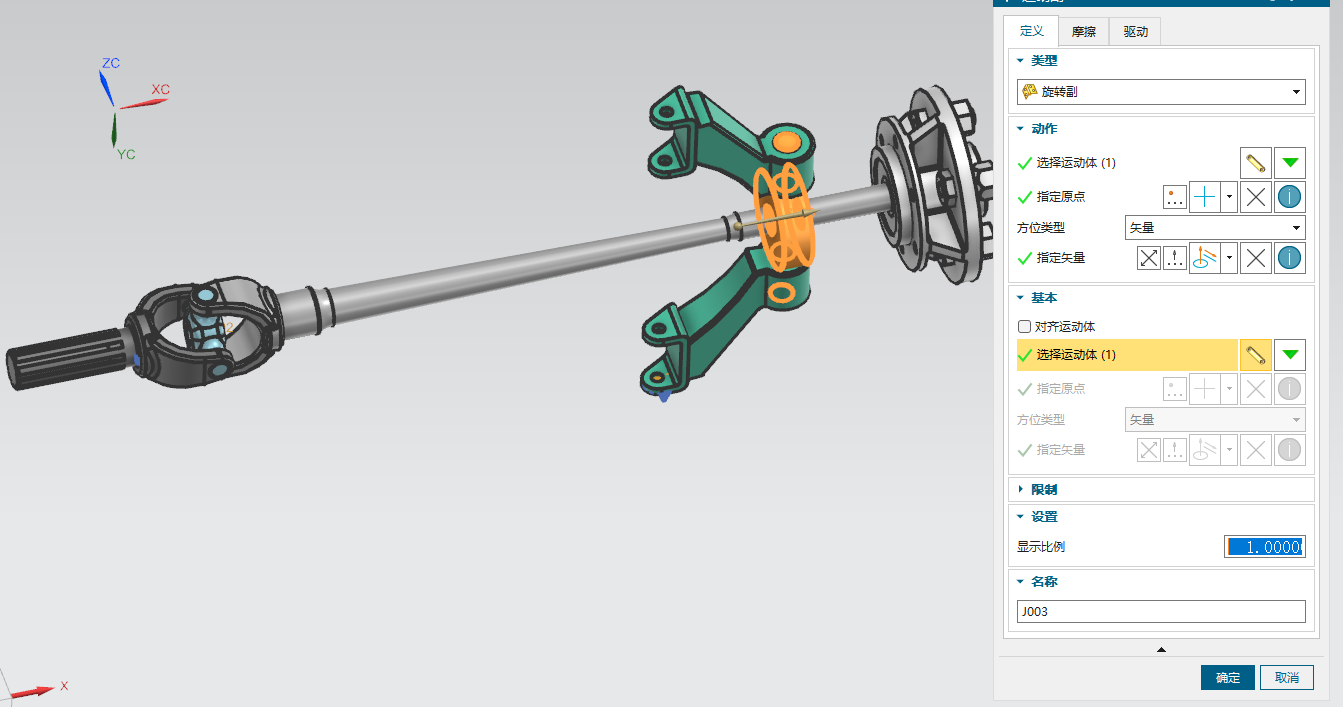
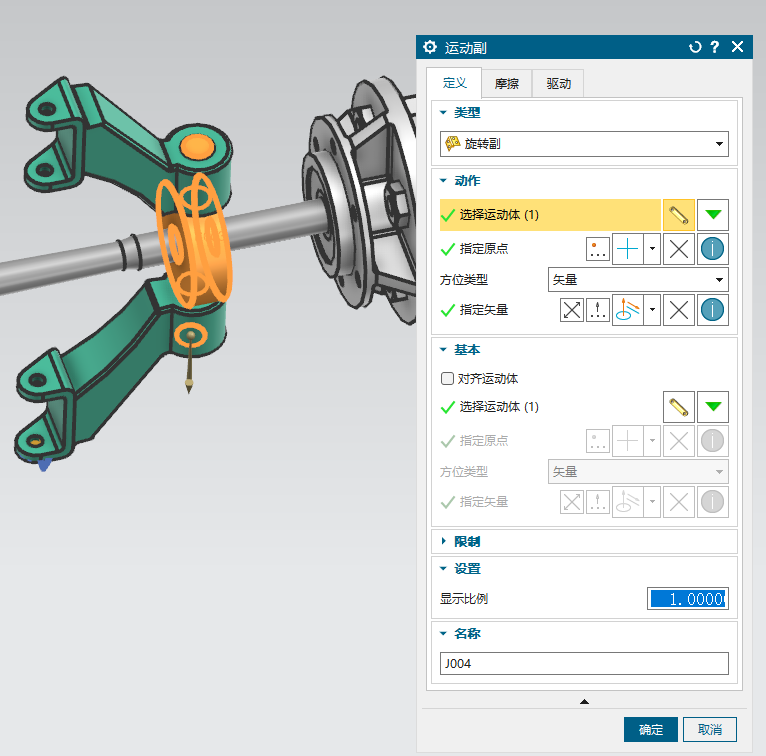
创建驱动
动画
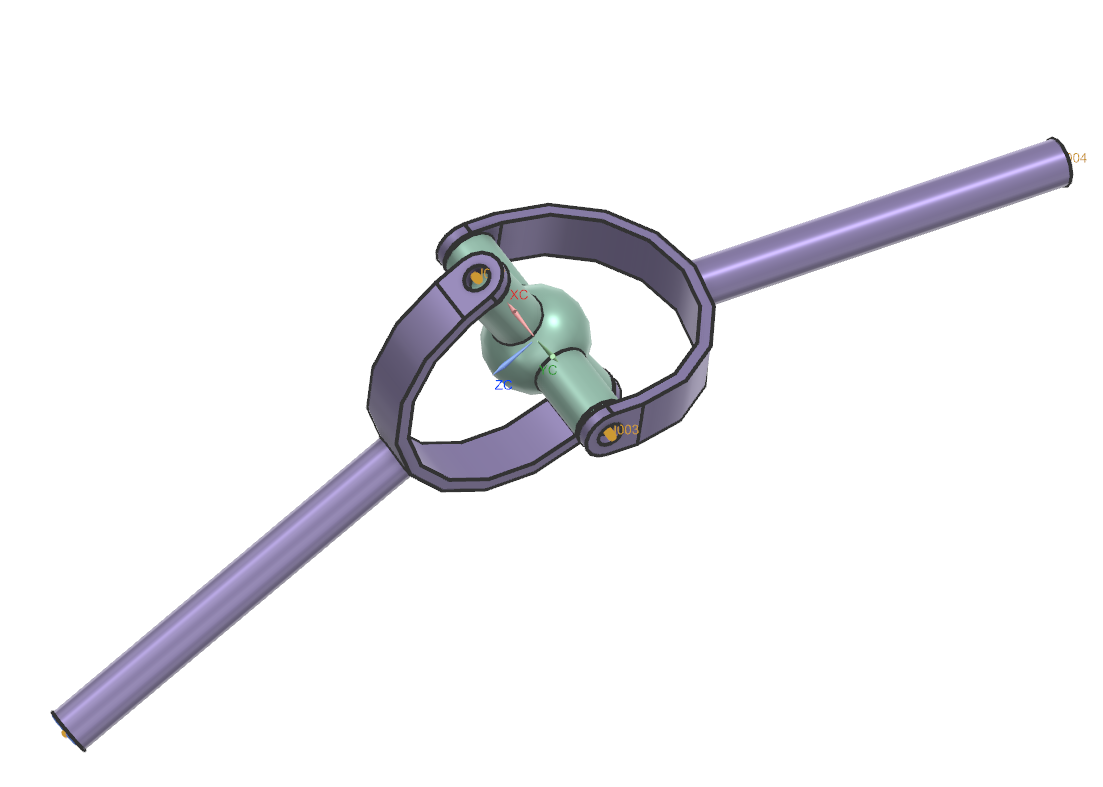
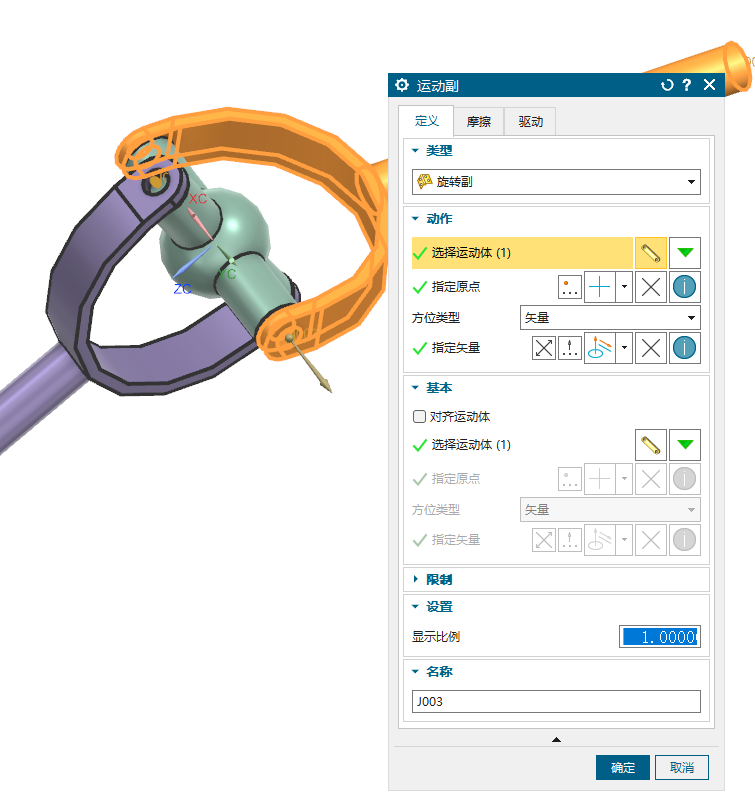
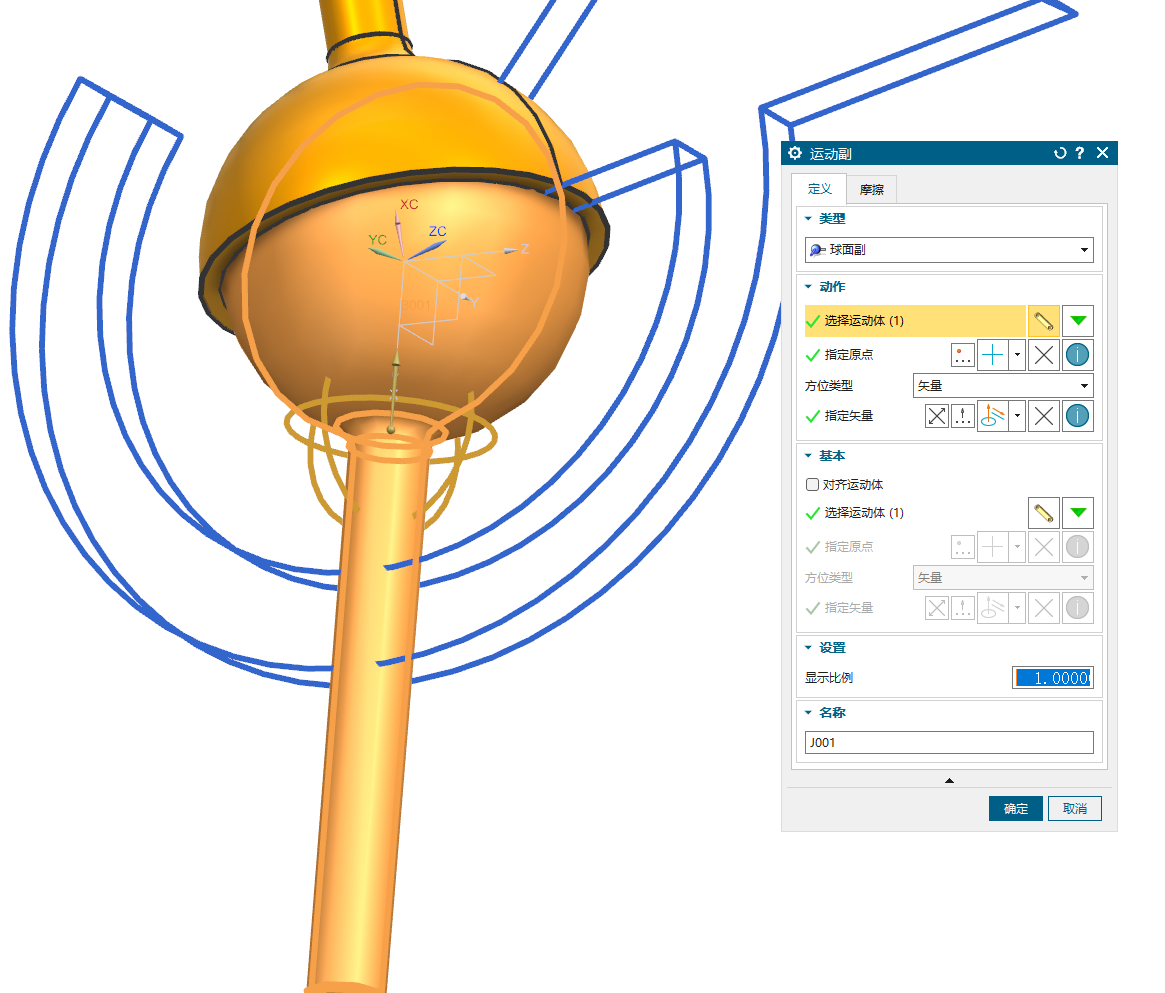
球面副
创建运动体,这里将凹杆部分设置为固定运动体
创建球面副,选择球面上的边线,这样可以捕捉原点到球心
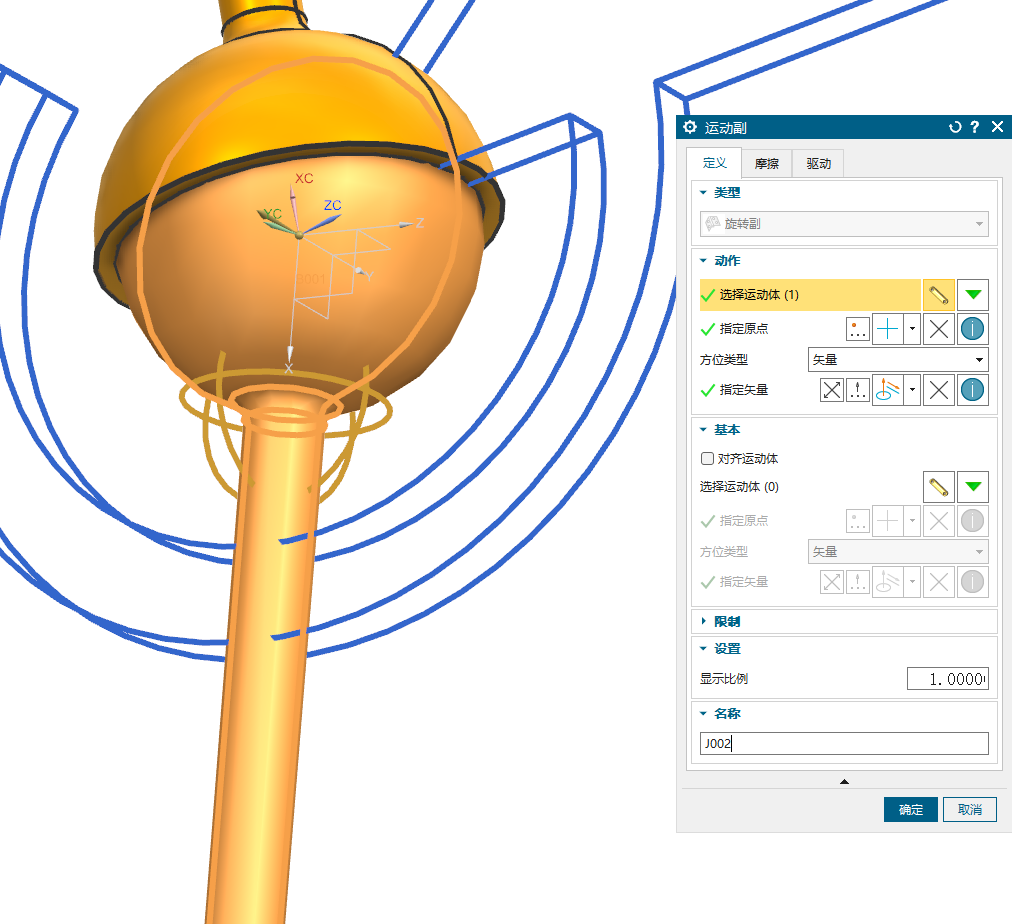
在球的边线上还可以创建旋转副
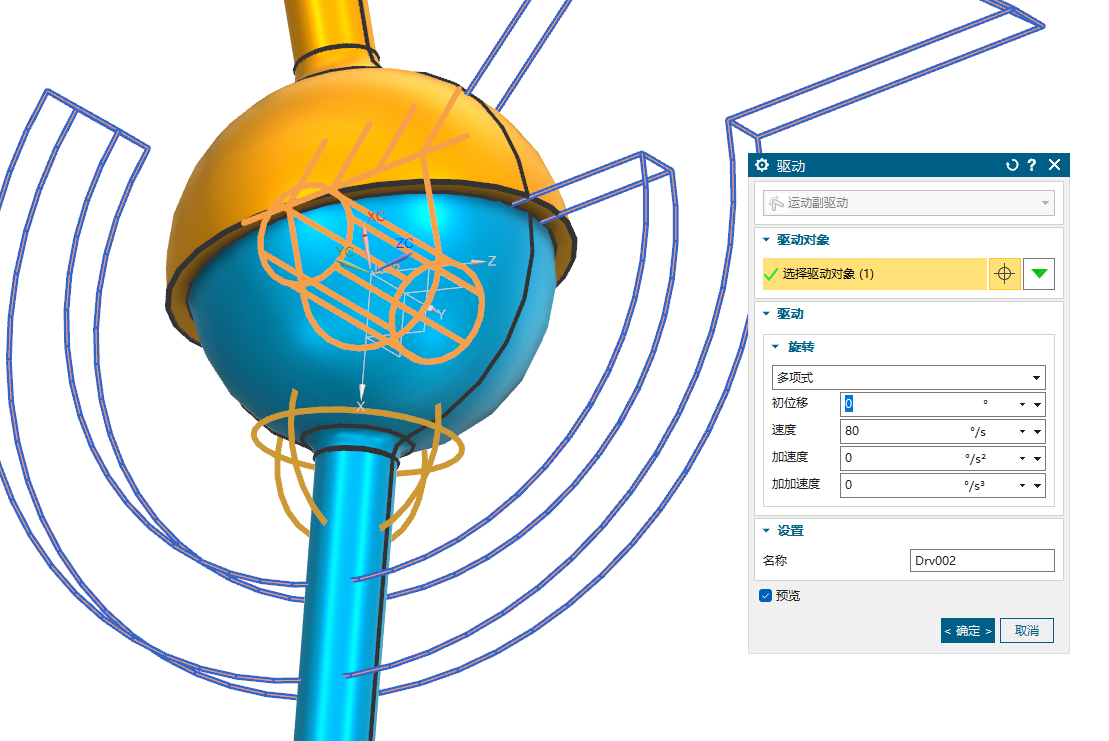
给旋转副添加驱动
动画
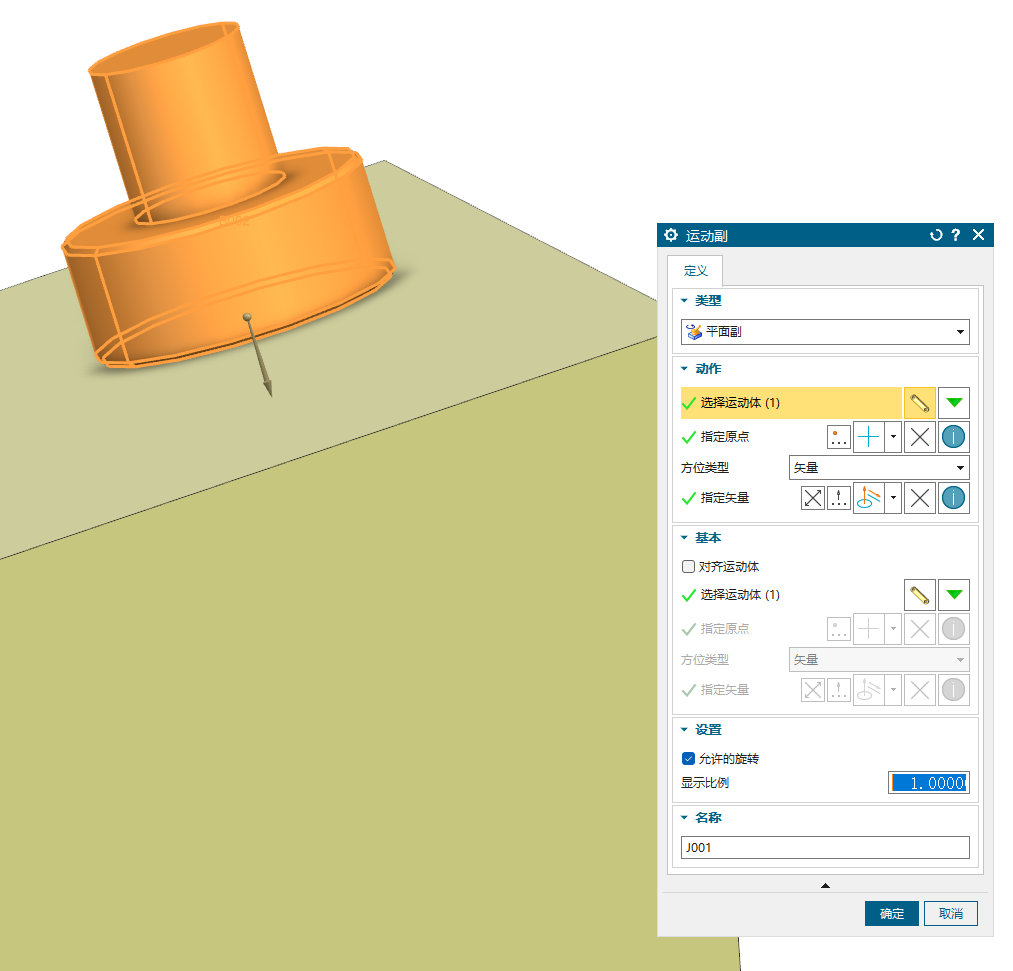
平面副
新建运动体,滑道创建为固定运动体
创建平面副
选滑块与滑道接触面的圆边线
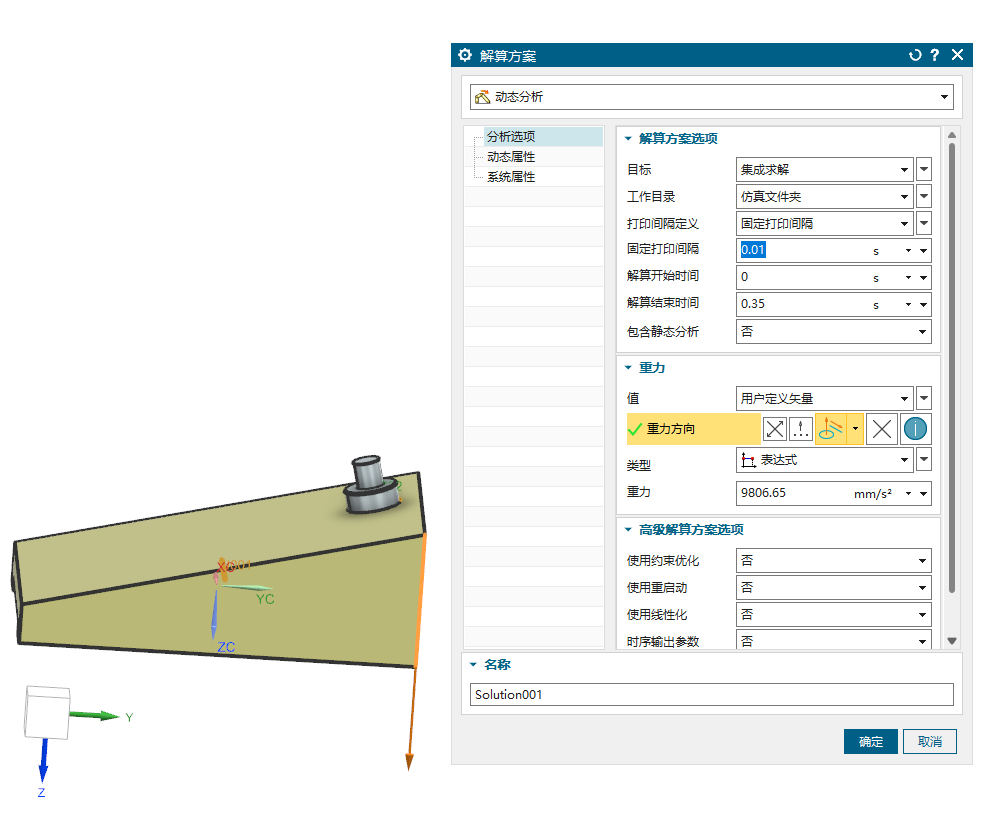
创建解算方案
解算结束时间:0.35s
重力方向:选滑道的竖直边线(坐标系Z正向)
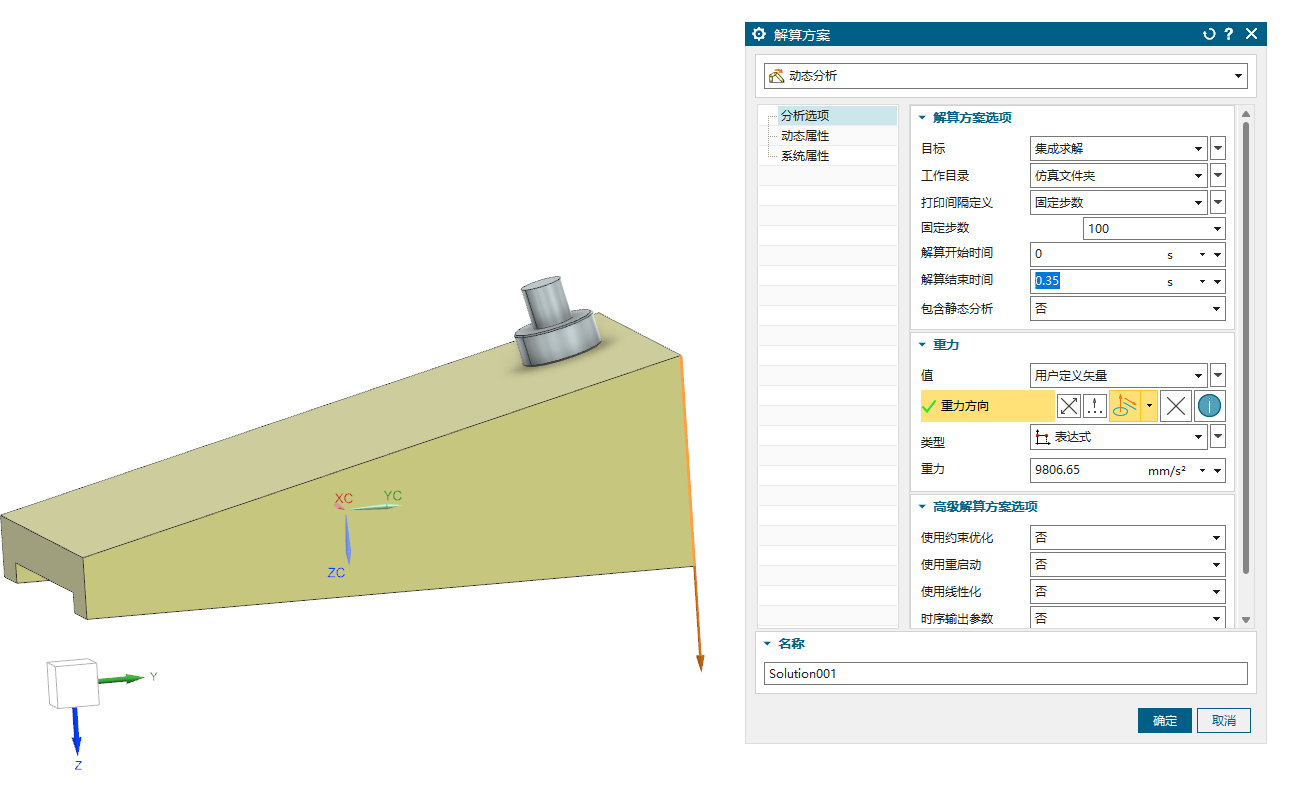
动画
在重力的作用下,滑块沿滑道滑动
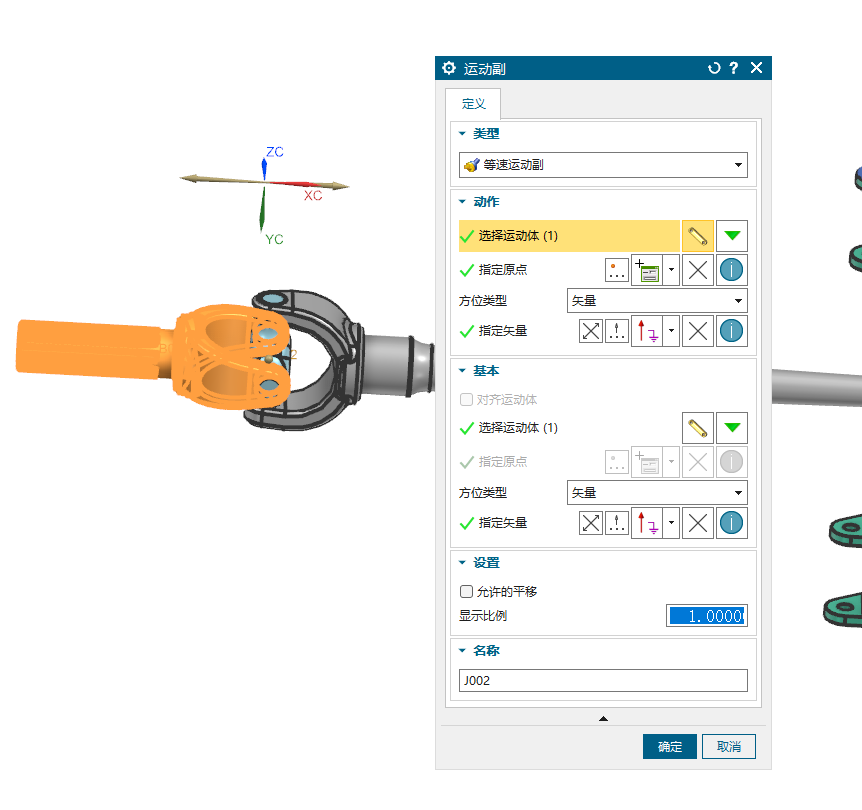
等速运动副
还是使用前面 转向驱动总成 模型,创建运动体也一样
把万向节运动副替换为等速运动副
动作组
选择运动体:选主轴
指定原点:叉孔轴线中点(十字轴中点)
指定矢量:主动轴轴线方向
基本组
选择运动体:从动轴
指定矢量:从动轴轴线
另外需要把这里的旋转副改为柱面副,这样轴向可以滑动,保证不会锁死
不然可能解算报错:Simcenter 3D Motion 求解器锁定

动画
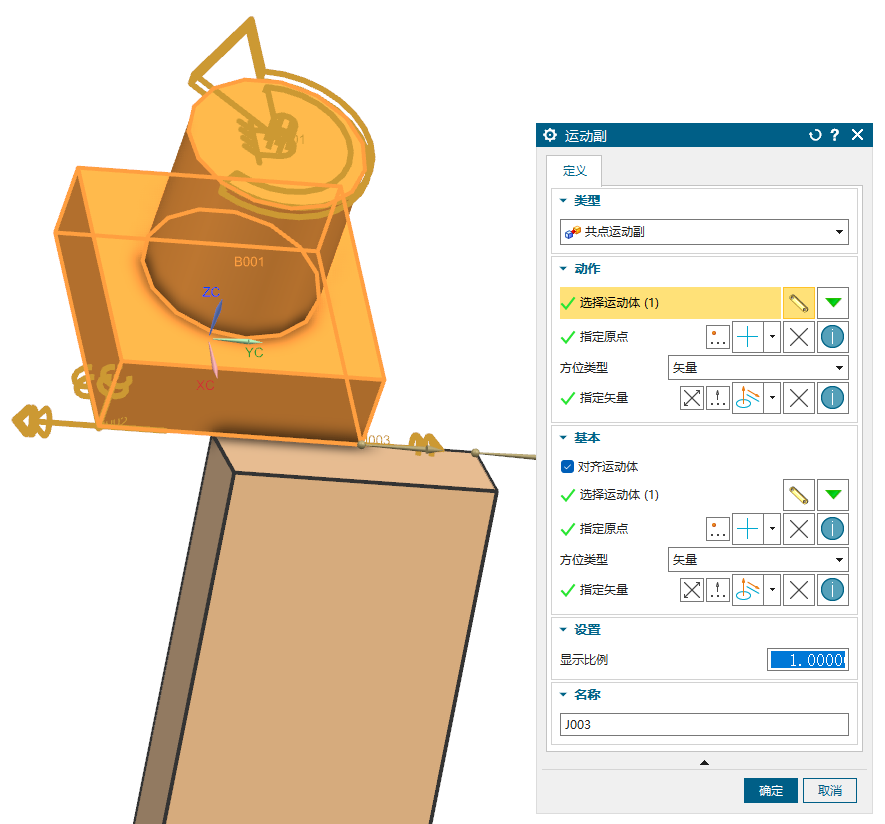
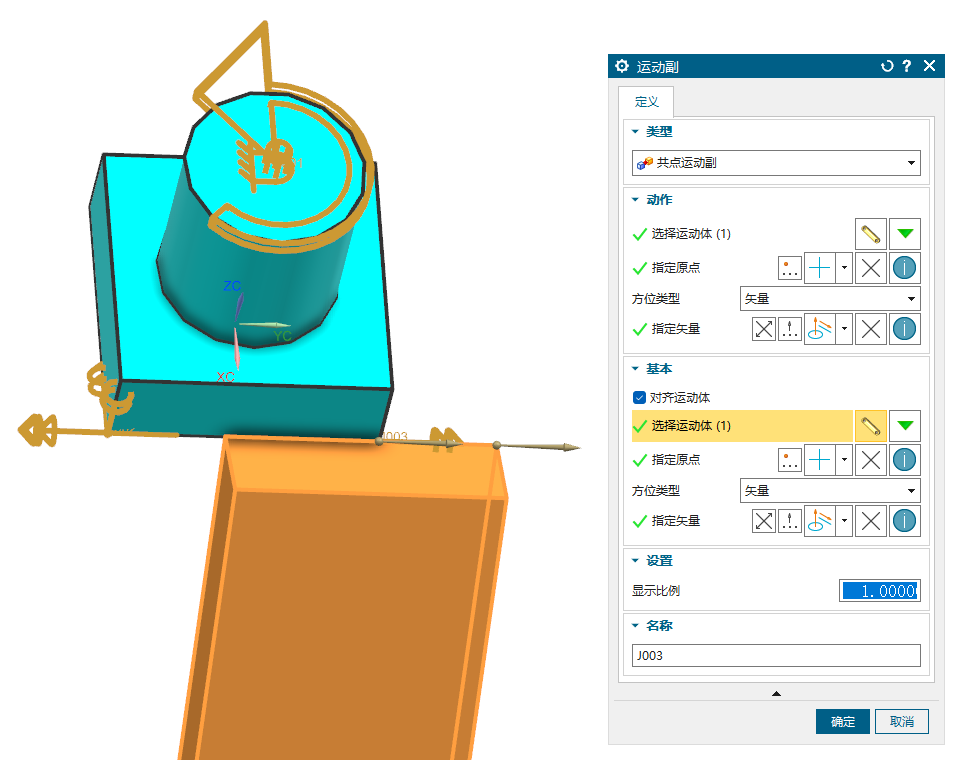
共点运动副
共点运动副会约束 3 个自由度(3 个轴向的平移被锁定)
3 个零件创建为 3 个运动体
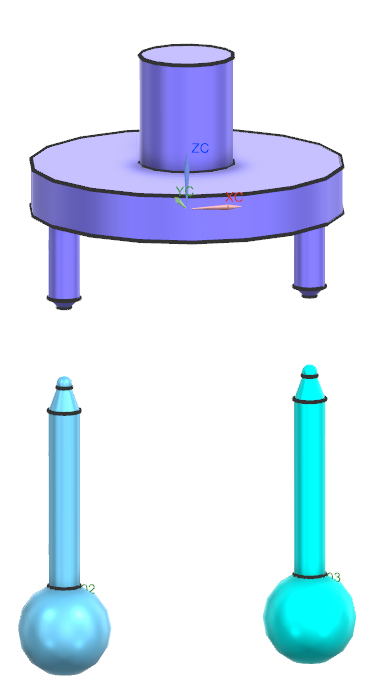
为转盘添加一个旋转副
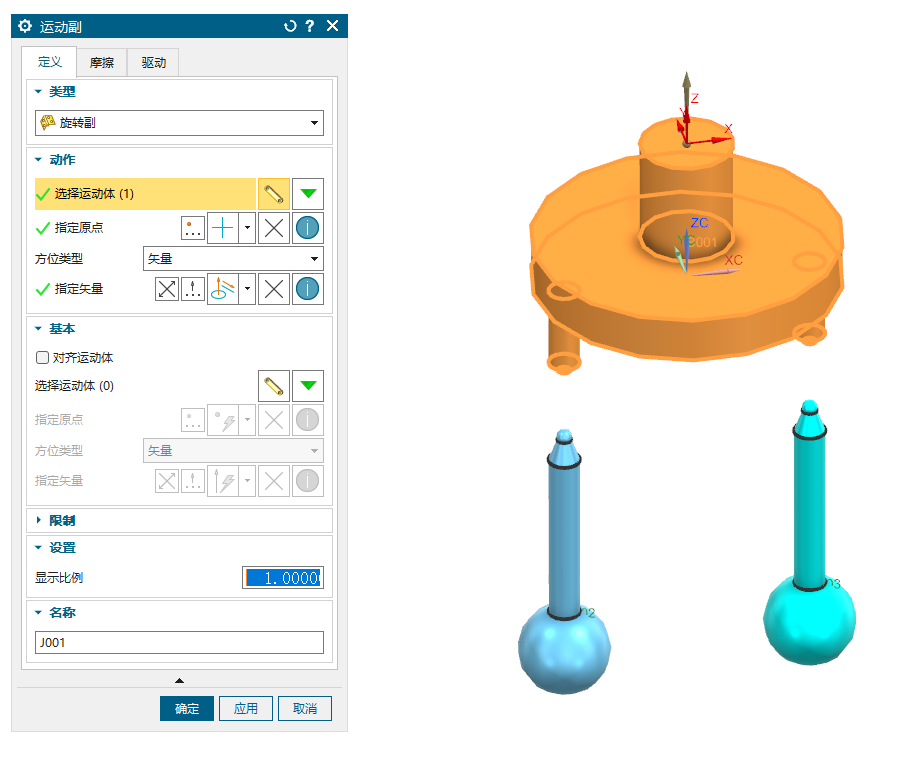
第一个共点运动副
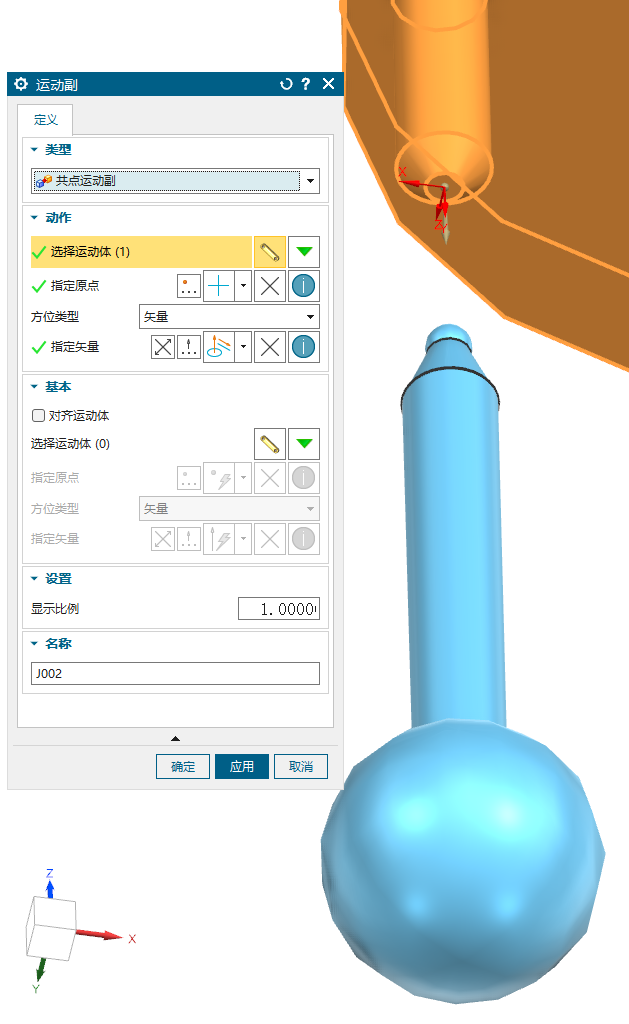
勾选对齐运动体,基本组的原点捕捉球心

矢量选轴向
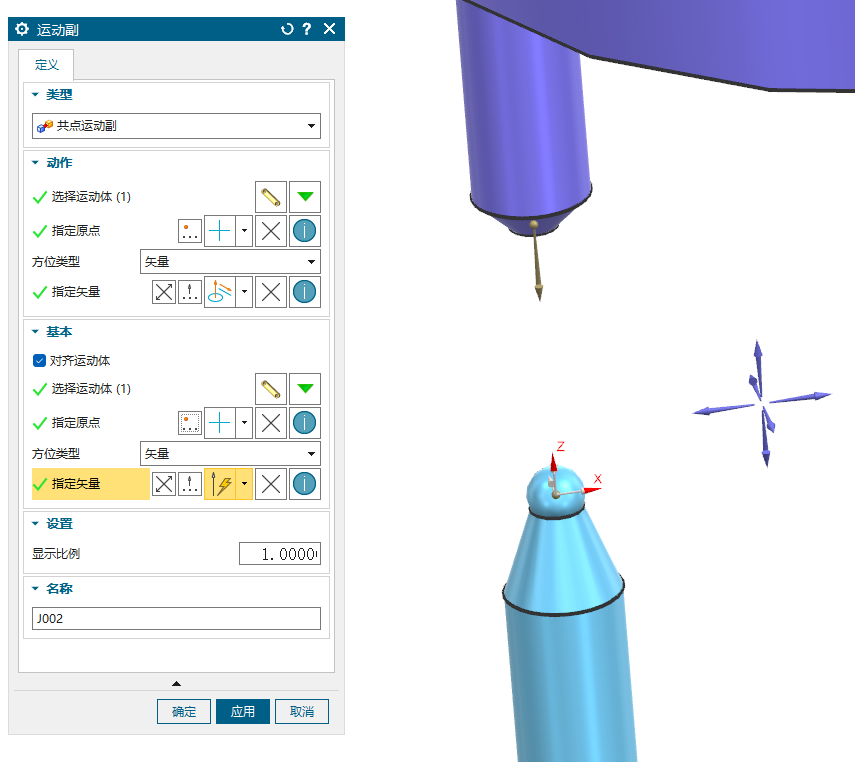
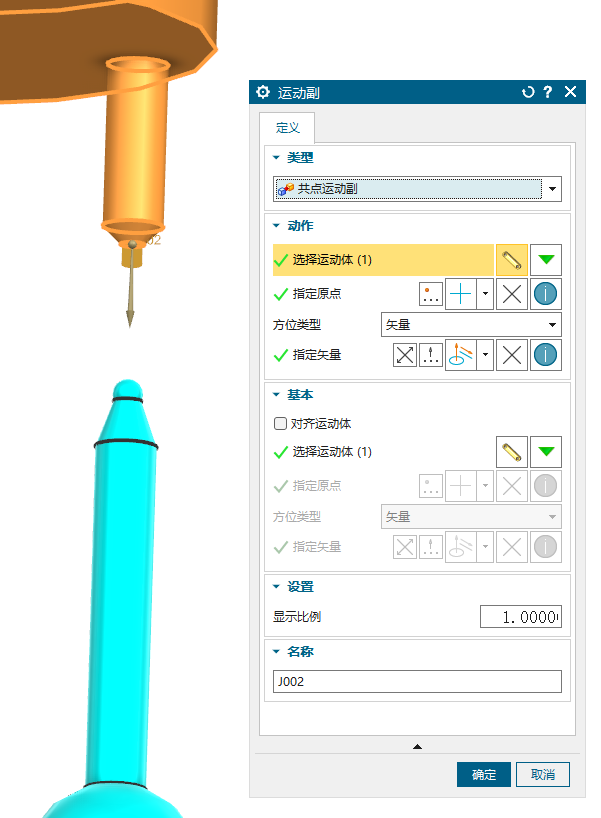
第二个共点运动副
没有勾选对齐运动体,可以对比一下效果
为转盘的旋转副添加驱动,创建解算方案,求解,播放动画
勾选了对齐运动体的共点运动副就是把两个运动体的指定原点重合在一起了,但是两个运动体之间可以在点处旋转。没勾选对齐运动体就是约束了两个点的相对坐标位置,同样不约束旋转。
共线运动副
2 个零件都创建为运动体
添加旋转副
切换到驱动选项卡,可以直接在运动副定义中添加驱动
添加共线运动副
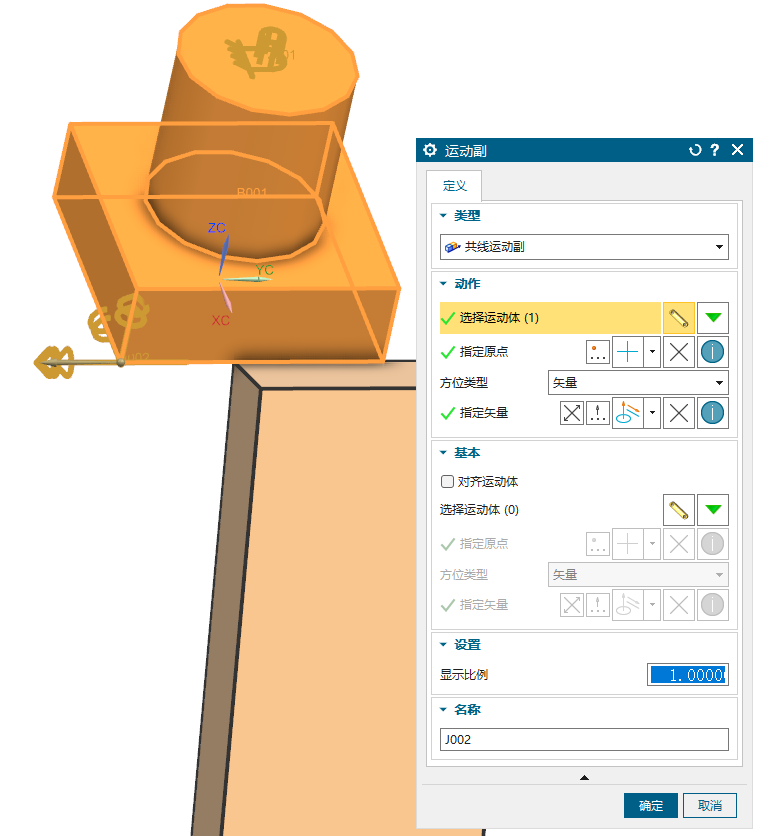
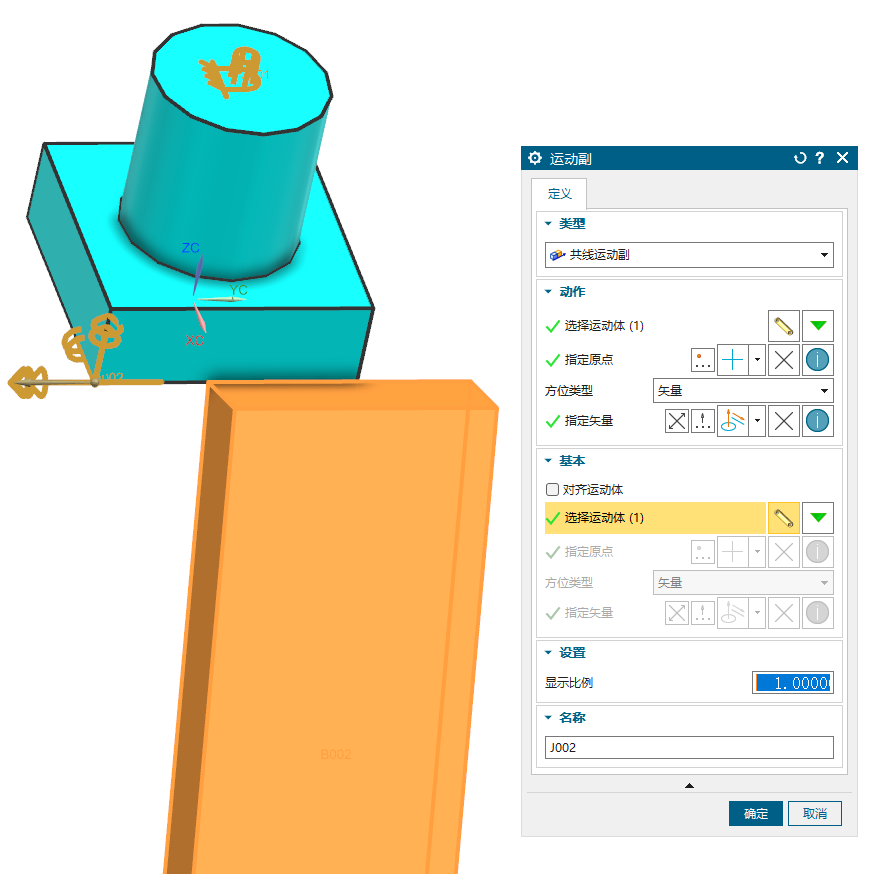
共线运动副约束 4 个自由度,2 个与线垂直方向的平移和旋转,剩下沿线的平移和旋转 2 个自由度。
这个时候上面的零件旋转,理论上方块应该顺着线方向被甩出,实际求解时可能因为计算条件的关系,直接呈现的结果就是被丢出,配合重力加速度会坠下去
在共线运动副所在的线上加一个共点运动副,这样相当于组合成了旋转副
再次求解播放动画
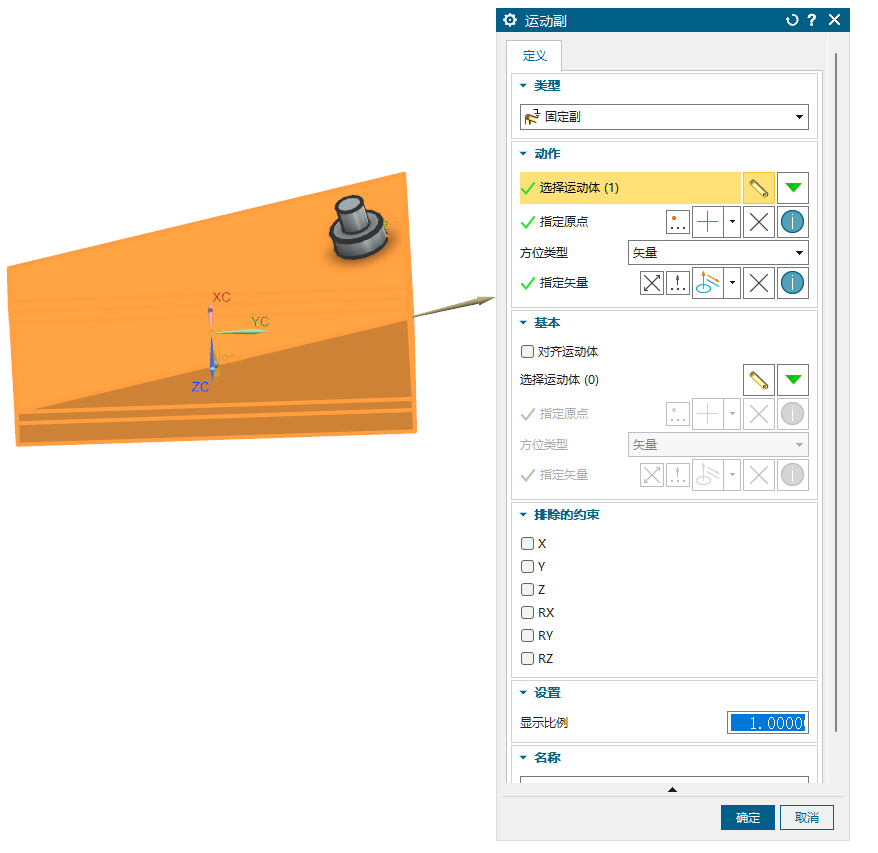
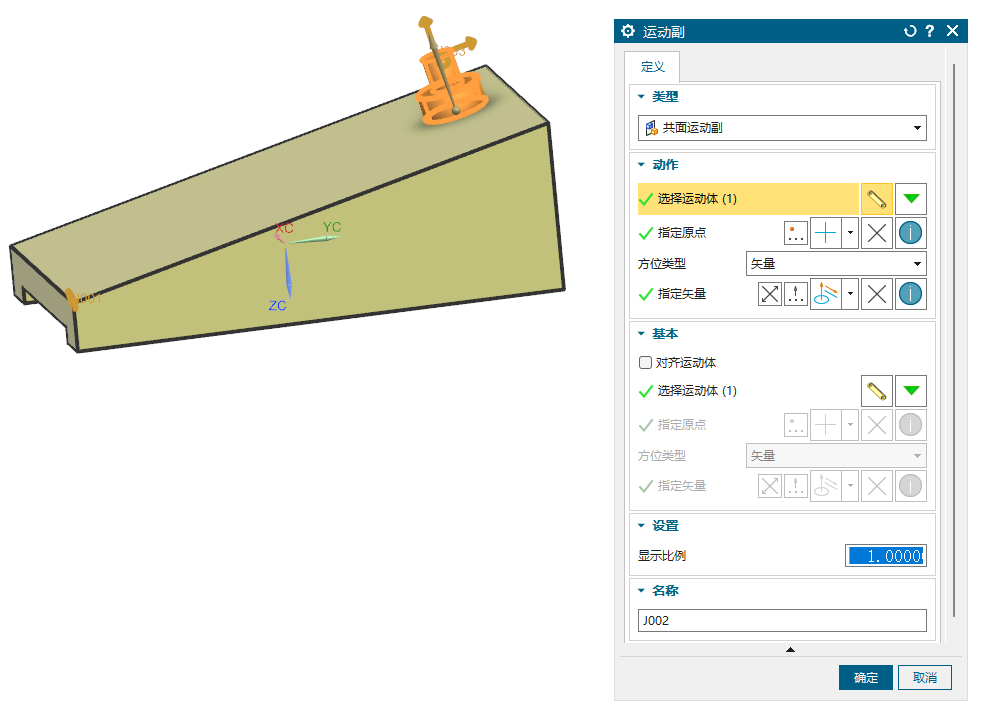
共面运动副 & 固定副
使用前面平面副的模型,为滑道和滑块各自创建运动体
将滑道添加为固定运动副
创建共面运动副
动作组选滑块共面平面上的圆边线
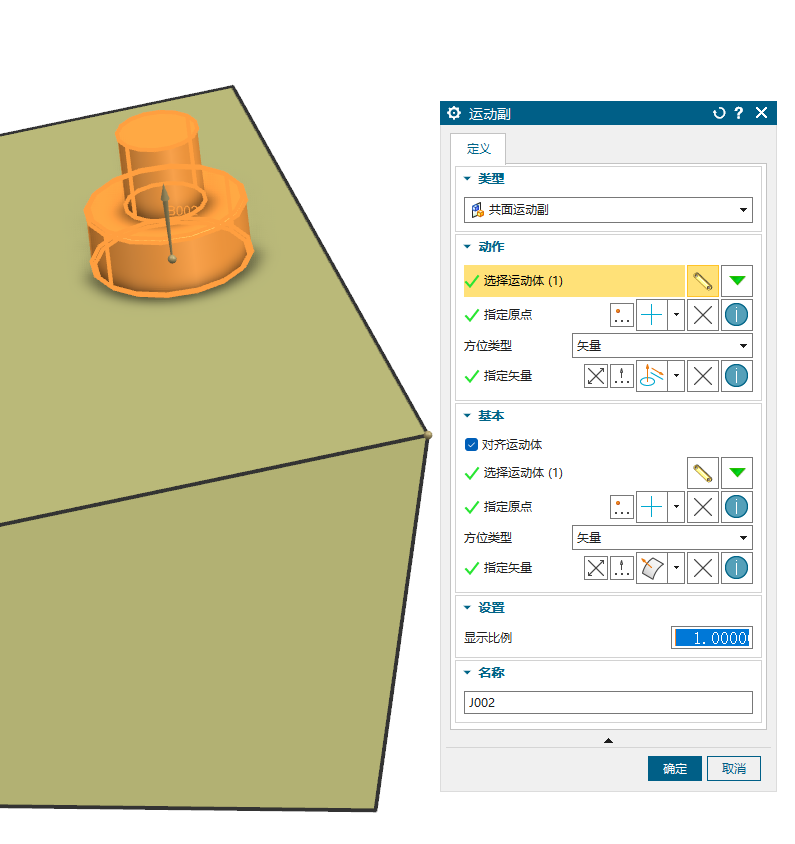
基本组
勾选对齐运动体
选择运动体选滑道
指定原点选共面平面上的一点
指定矢量,下拉选面/平面法相,然后选择滑道共面平面
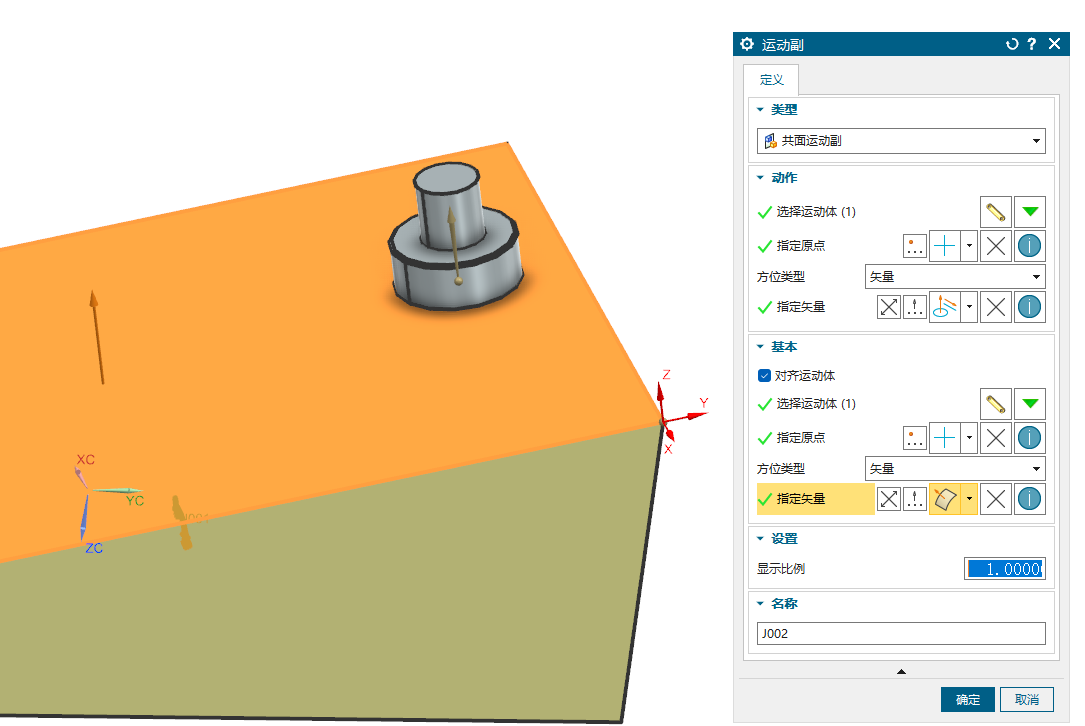
创建解算方案,解算结束时间 0.35s,重力方向沿Z正向
动画效果和前面平面副一样
方向运动副
使用前面平面副的模型,为滑道和滑块各自创建运动体
将滑道添加为固定运动副
创建好共面运动副
创建方向运动副
基本组的矢量方向在重力方向上
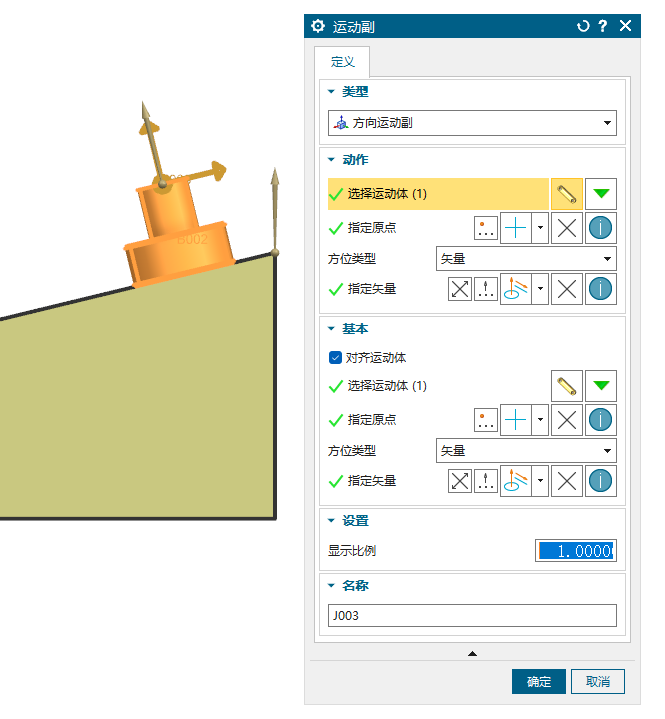
可以看到滑块立起来了
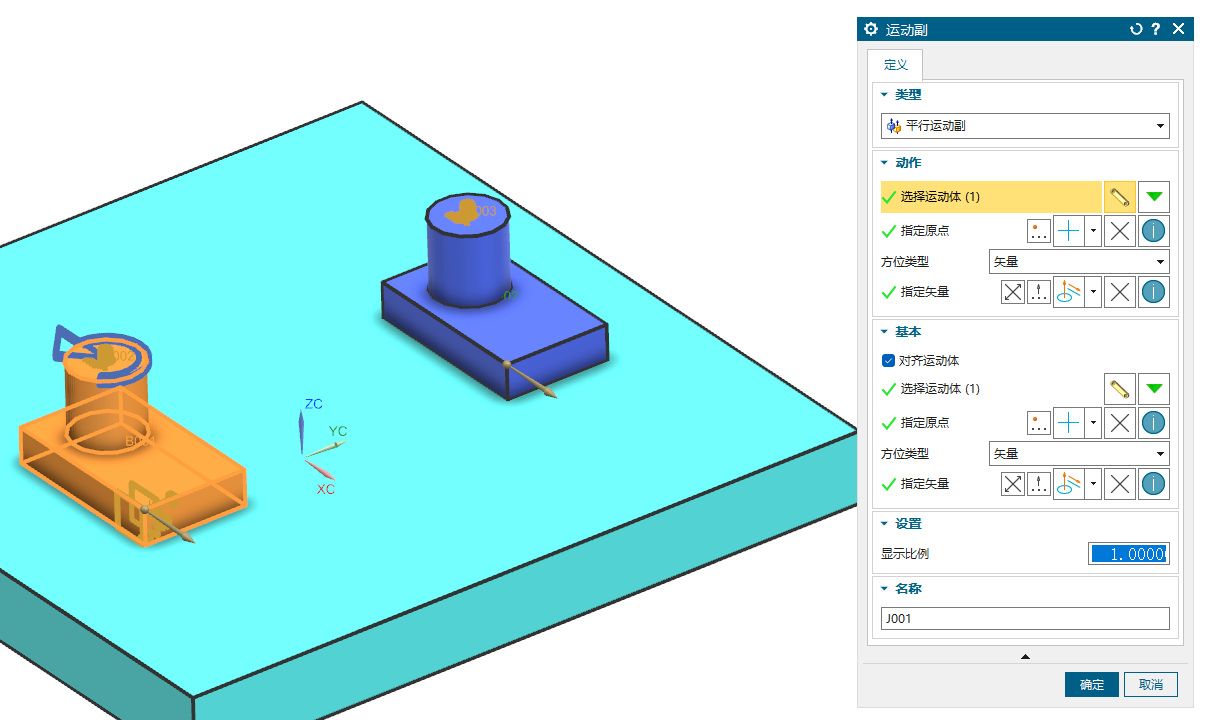
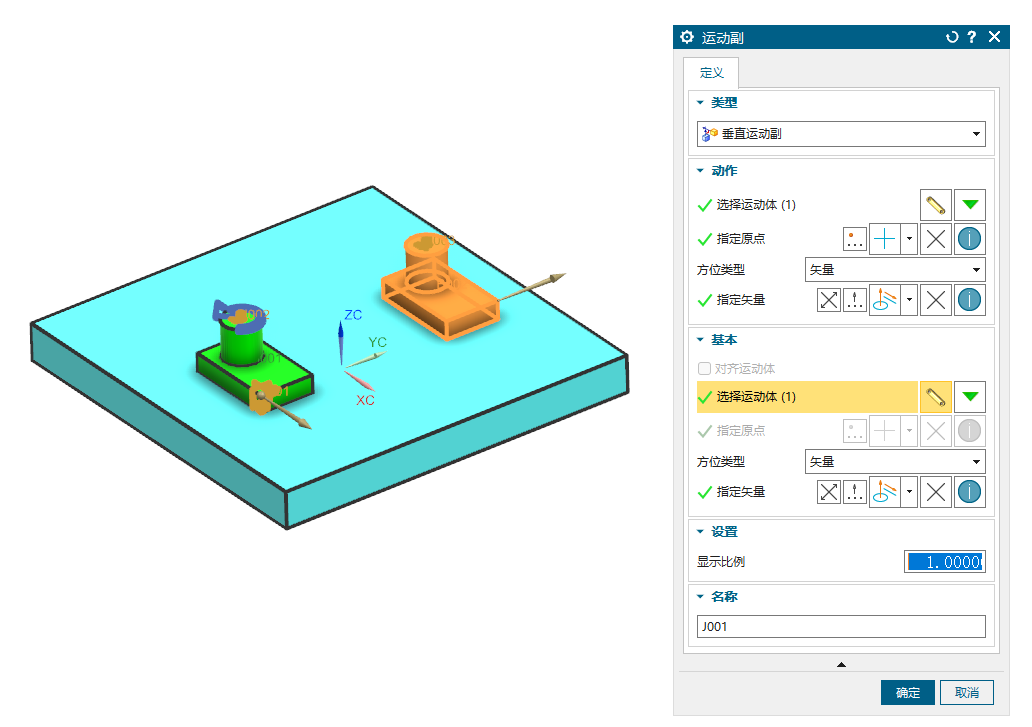
平行运动副和垂直运动副
将绿色和蓝色的两个零件各自创建为运动体
创建平行运动副
让 2 个运动体的侧面保持平行
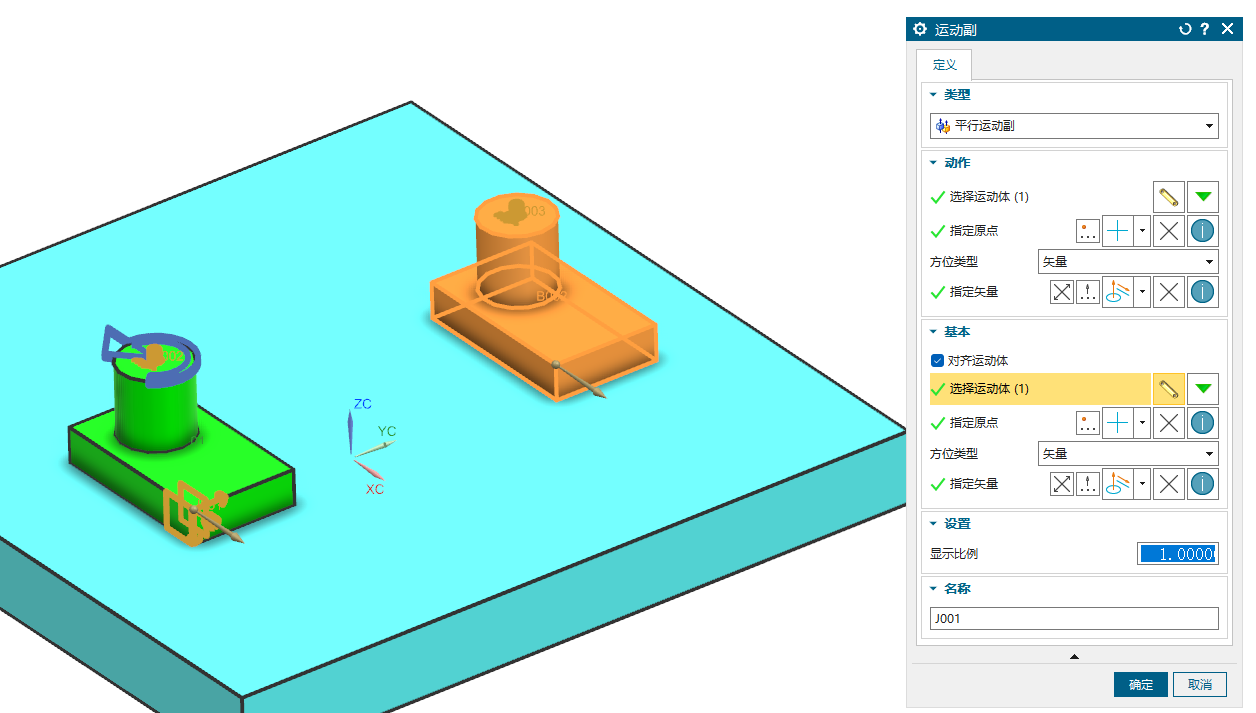
再分别给 2 个运动体创建旋转副
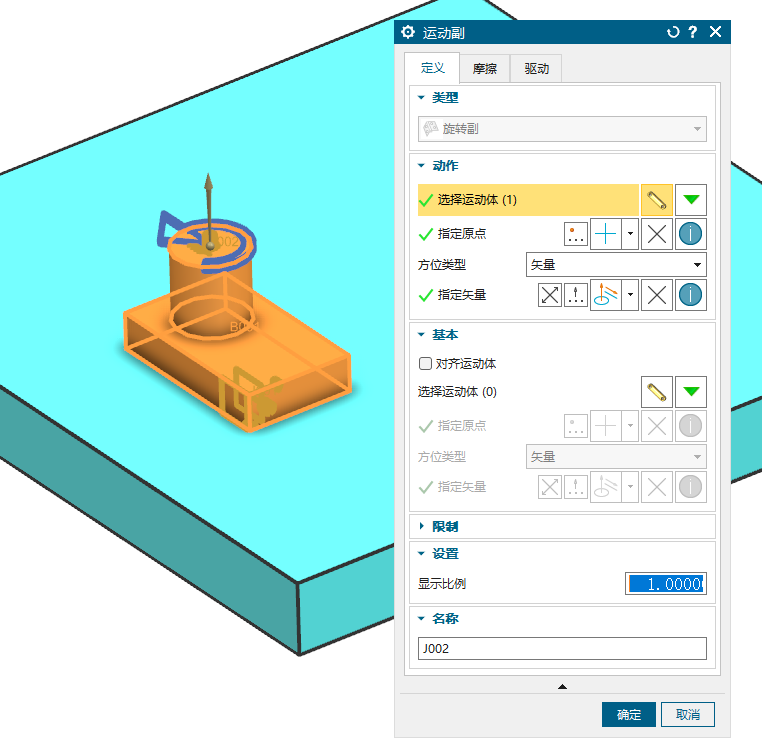
为一个运动体添加驱动,动画如下
把平行运动副删掉,重新创建垂直运动副。
基本组设置的时候,不需要指定原点了,只需要指定运动体和矢量,矢量要和动作组的矢量垂直。
动画效果还是一样的
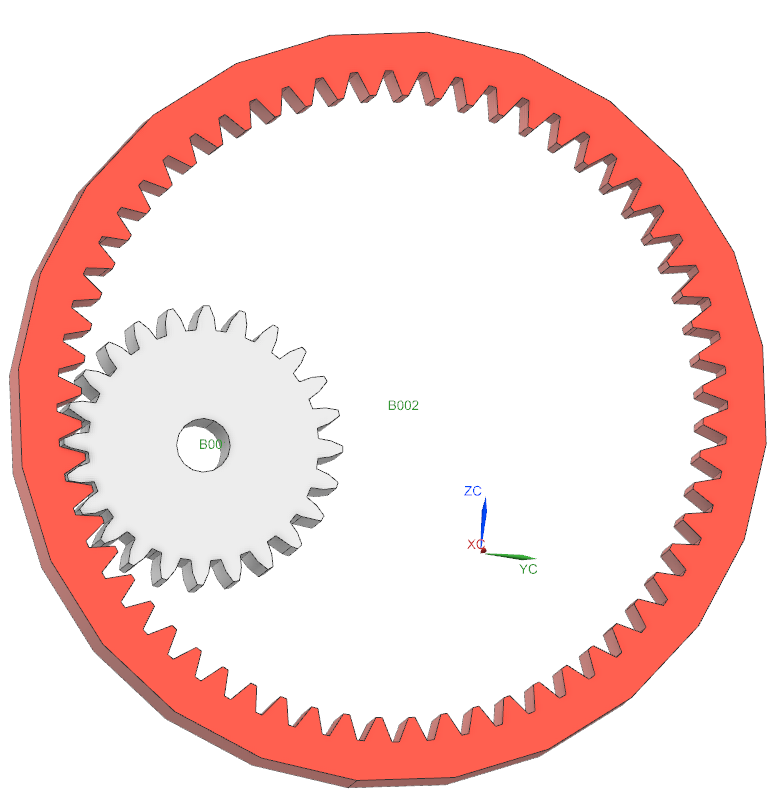
齿轮耦合副
2 个齿轮各自创建为运动体
2 个齿轮各自创建好旋转副
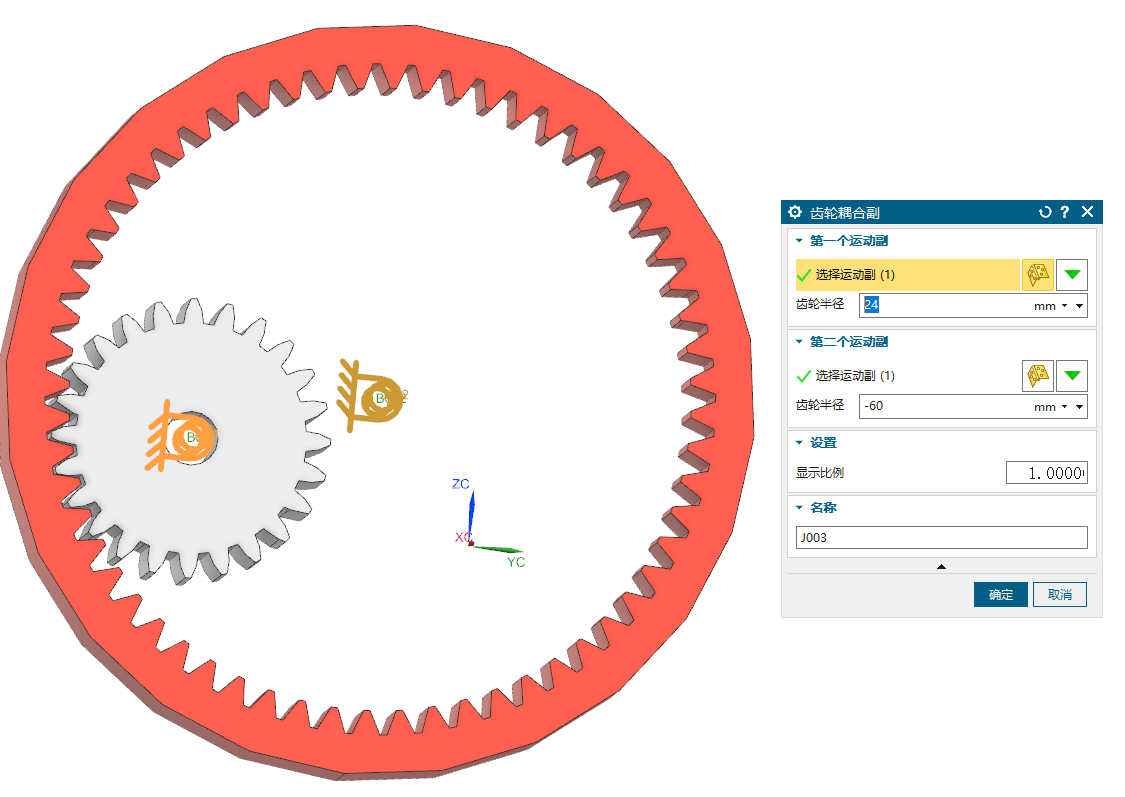
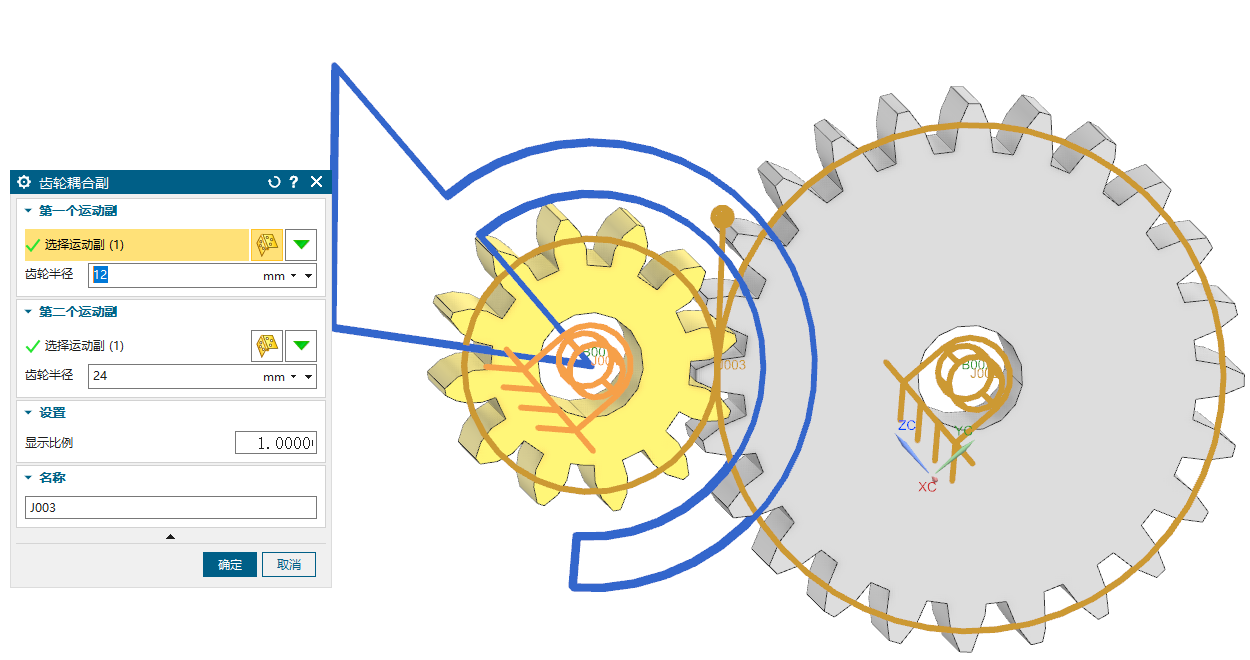
点开齿轮耦合副

第一个运动副选的小齿轮的旋转副,不用管齿轮半径,最终计算需要的是两个啮合齿轮的半径之比,也等于齿数之比,直接填齿数即可,有 24 齿
第二个运动副选大齿轮的旋转副,大齿轮有 60 齿,由于大齿轮是内啮合的,需要加负号,这里填 -60,否则旋转方向是反的
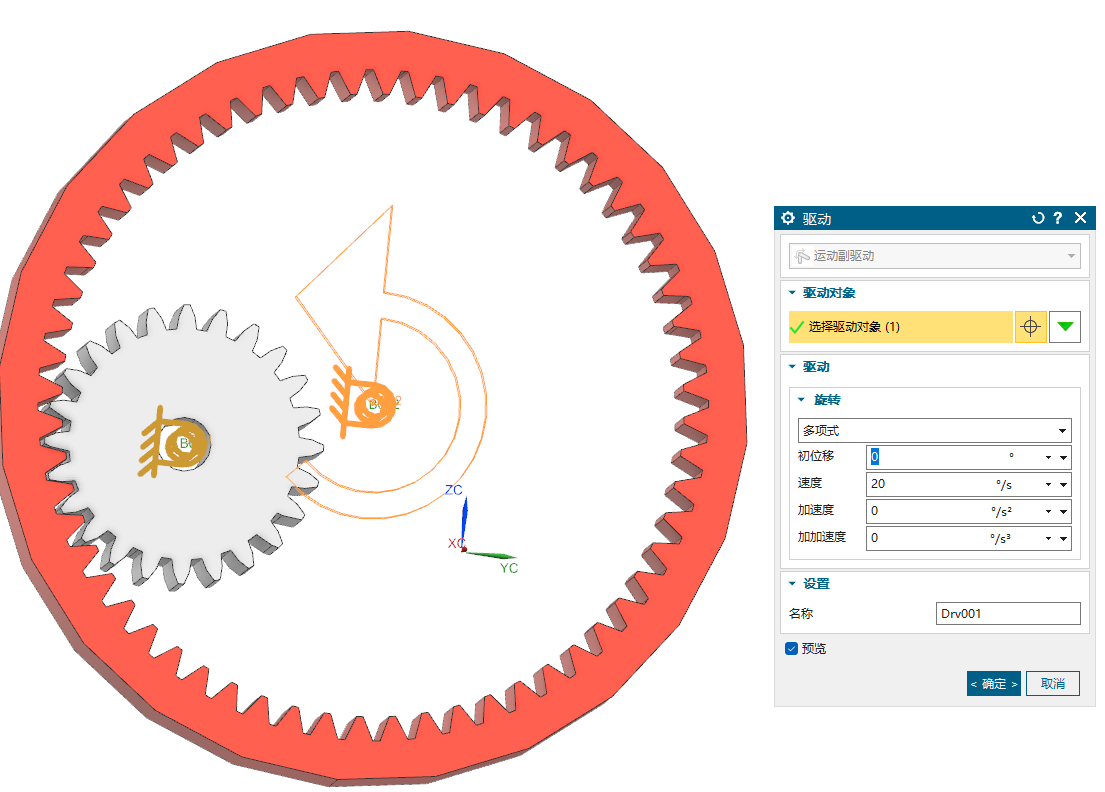
为大齿轮的旋转副添加驱动
动画
齿轮耦合副二
这个模型是外啮合齿轮,小齿轮 12 齿,大齿轮 24 齿
动画
齿轮齿条副
为齿轮和齿条分别创建运动体
为齿轮创建旋转副
为齿条创建滑动副
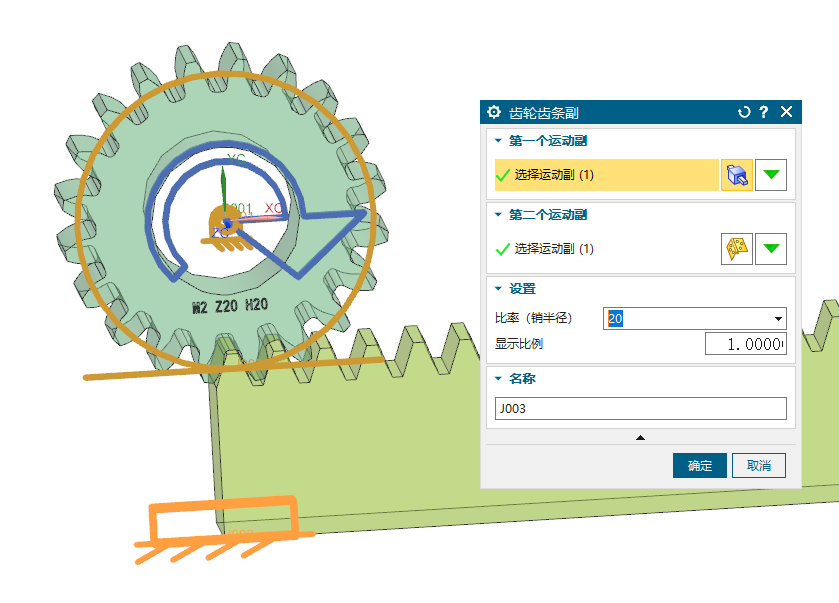
打开齿轮齿条副
第一个运动副选齿条的滑动副
第二个运动副选齿轮的旋转副
比率填节圆半径,齿轮上标注了模数 m=2,齿数 z=20,则齿圆半径 = m z / 2 = 2 20 / 2 = 20。这里的比率加负号也可以反转齿条滑动方向。
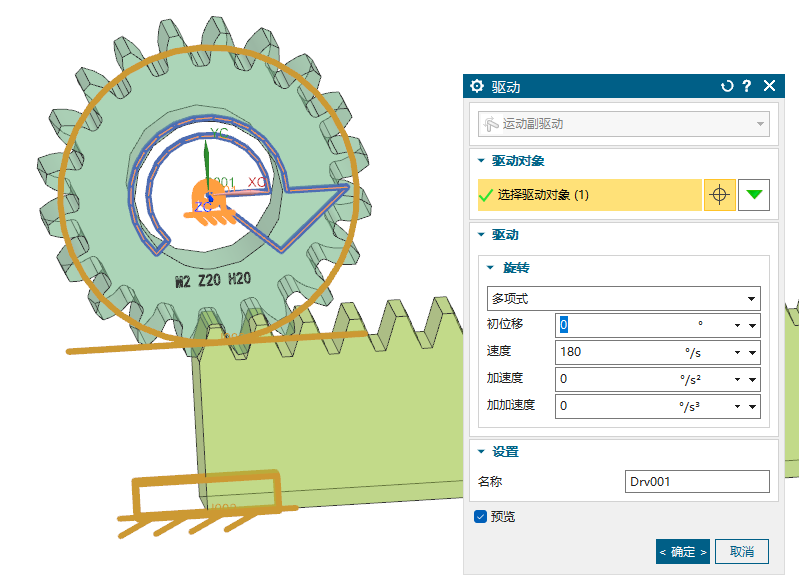
为旋转副添加驱动
动画
线缆副
为 2 个圆柱滑块各自创建运动体
为 2 个圆柱滑块创建运动副
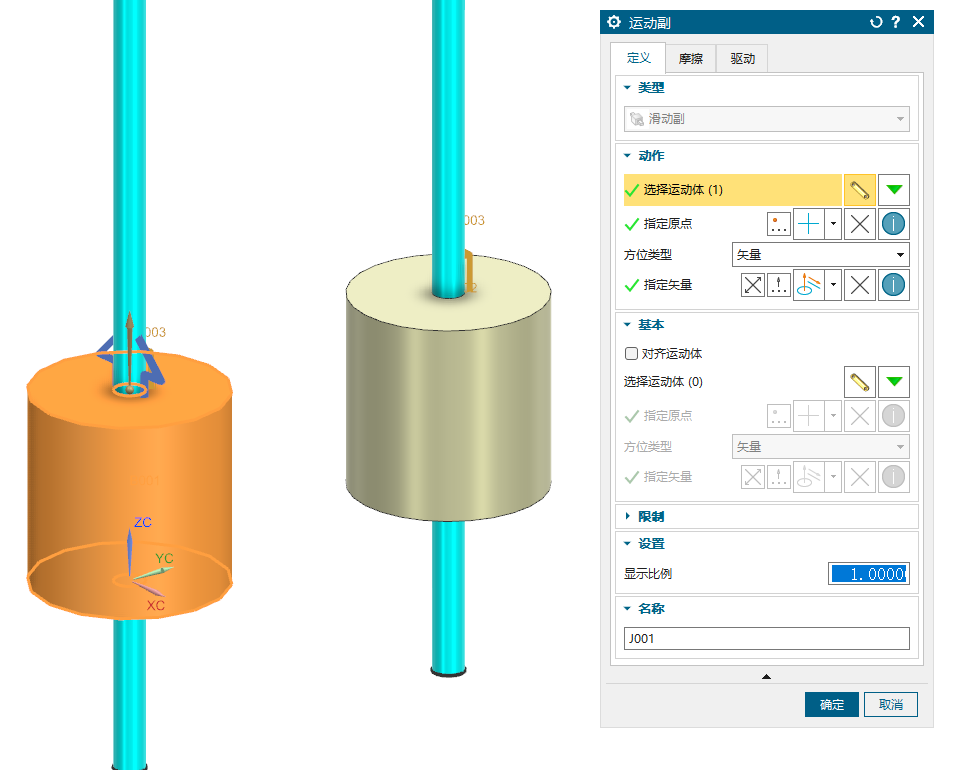
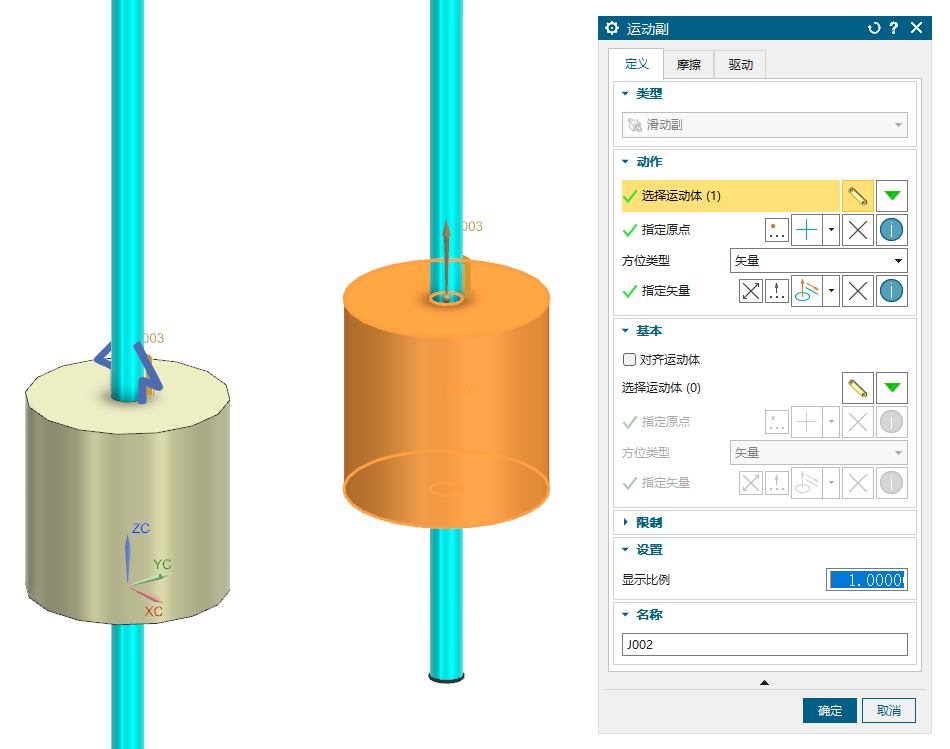
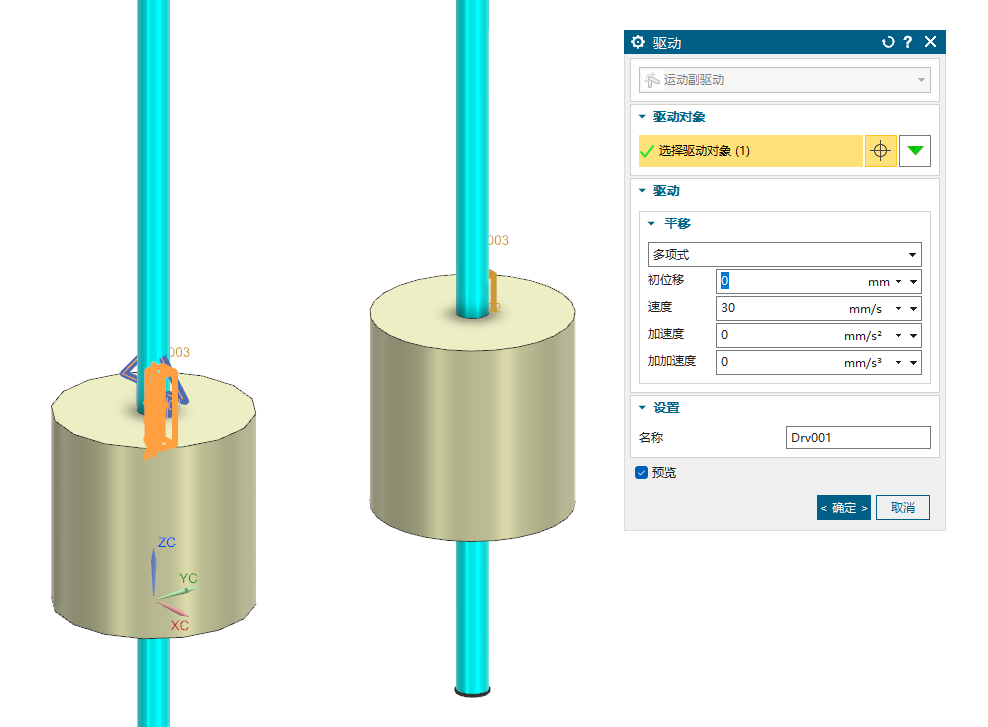
为一个滑动副创建驱动
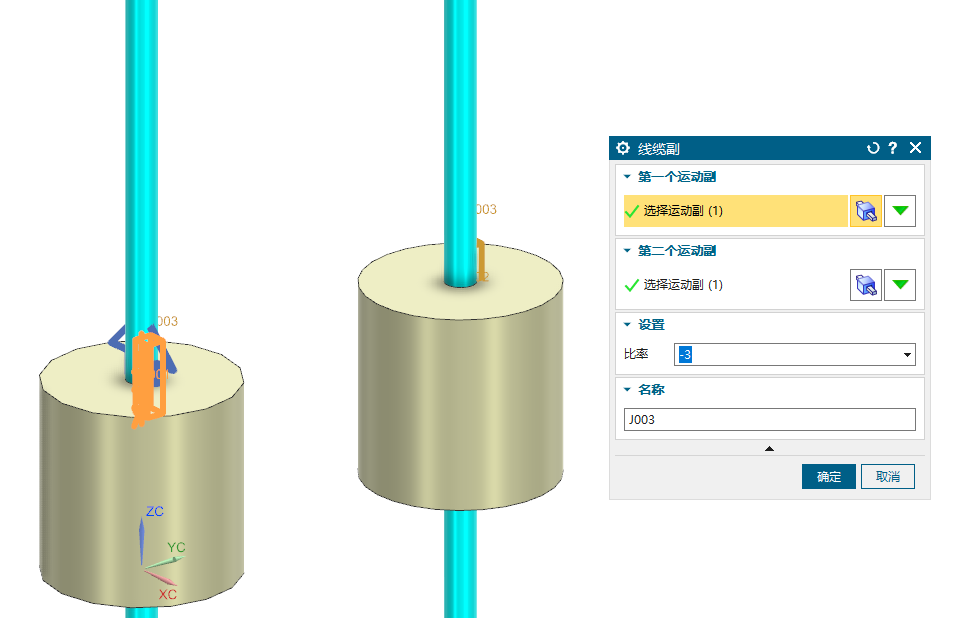
打开线缆副

分别选择两个滑动副,比率是第一个运动副和第二个运动副移动距离的比率。填正数,从动的滑块移动方向就和滑动副指定的矢量方向一样,填负数则和滑动副矢量相反。
动画
2-3 联接耦合副
3 联接耦合副
3 联接耦合副类似汽车的差速器,1 个动力输入,2 个传动输出。假如动力输入的运动副系数为 k_1,2 个传动输出的系数分别为 k_2、k_3,然后 3 个运动副的速度分别为 v_1、v_2、v_3,则有:
k_1v_1+k_2v_2+k_3v_3=02 个传动输出的动力总和等于 1 个动力输入,同时 2 个传动输出的方向是和它们的运动副矢量反向的。
为 3 个方块各自创建运动体,分别为它们添加滑动副
为绿色方块的滑动副添加驱动
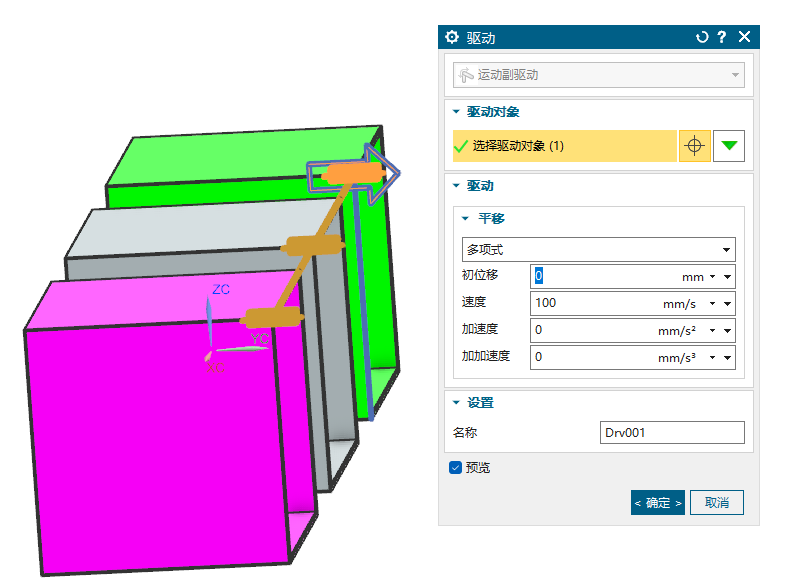
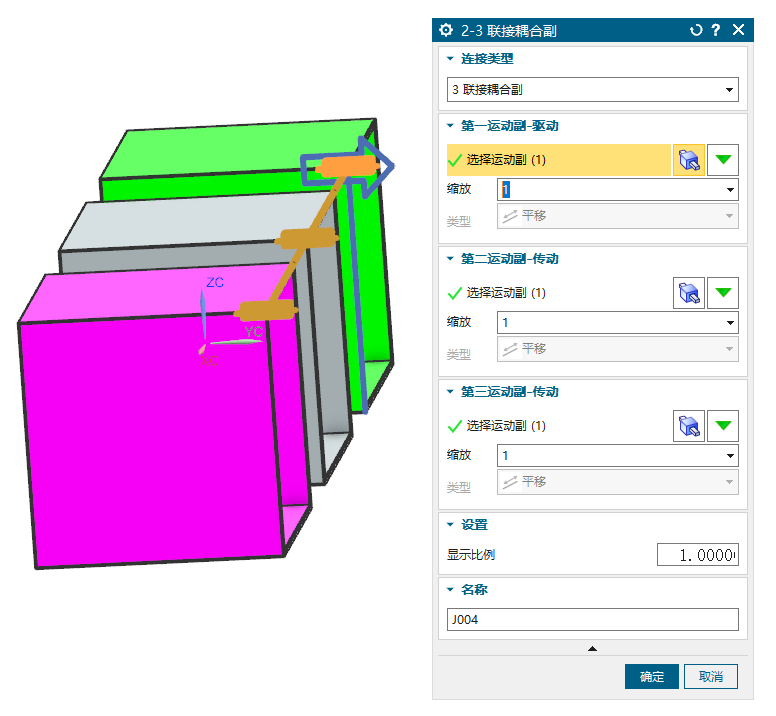
打开2-3 联接耦合副

选 3 联接耦合副,3 个运动副分别选择绿色(驱动)、灰色(传动)、品红(传动),缩放都填写 1。如果给传动运动副的缩放加负号,则可以将让运动方向和运动副矢量相反,但给驱动运动副加负号没有变化。
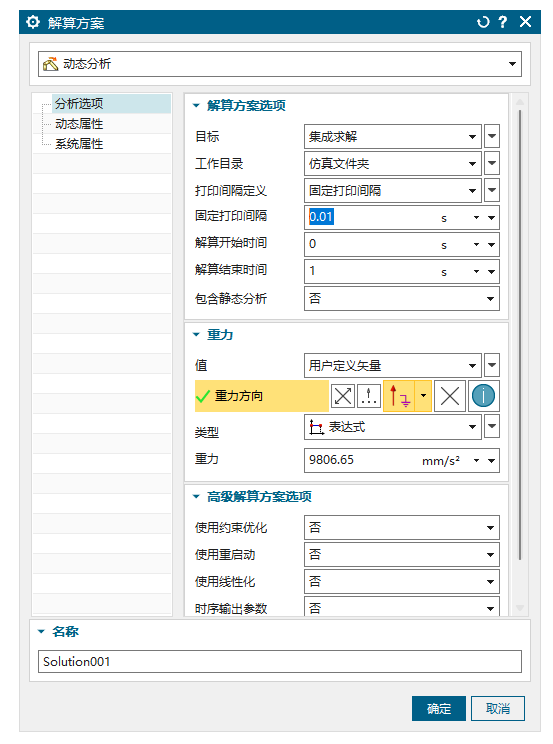
创建解算方案,解算结束时间 1s,然后求解
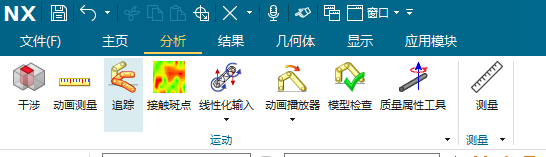
打开追踪
分别为 3 个方块创建追踪,绿色会向右运动,就追踪右侧边线,另外 2 个会向滑动副矢量相反反向运动,则会向左运动,因此追踪左边线
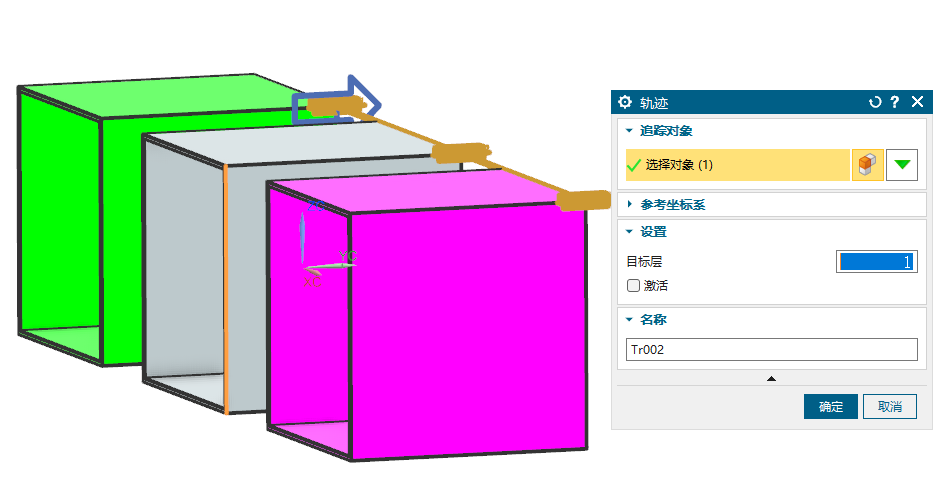
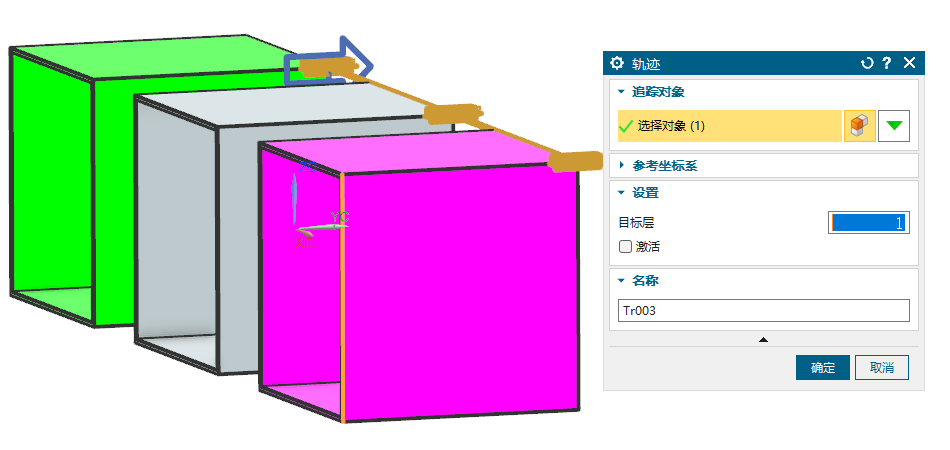
打开动画播放器,需要勾选轨迹
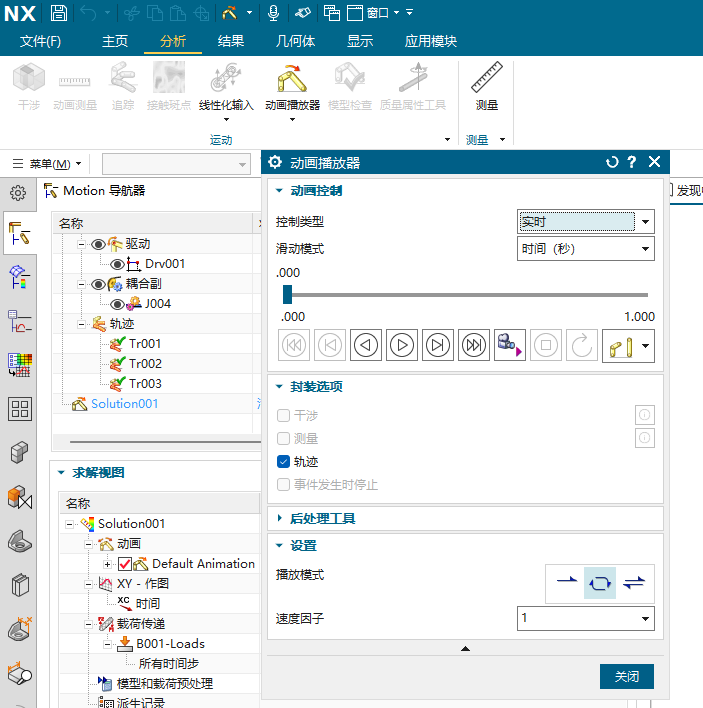
动画
然后可以测量轨迹
品红移动了 50mm
灰色也移动了 50mm
绿色移动了 100mm
绿色是动力输入,设置的速度为 100mm/s,总时长 1s,所以对应绿色移动 100mm,两外 2 个在没有外部阻力的情况下,均分了动力,各自移动了 50mm。
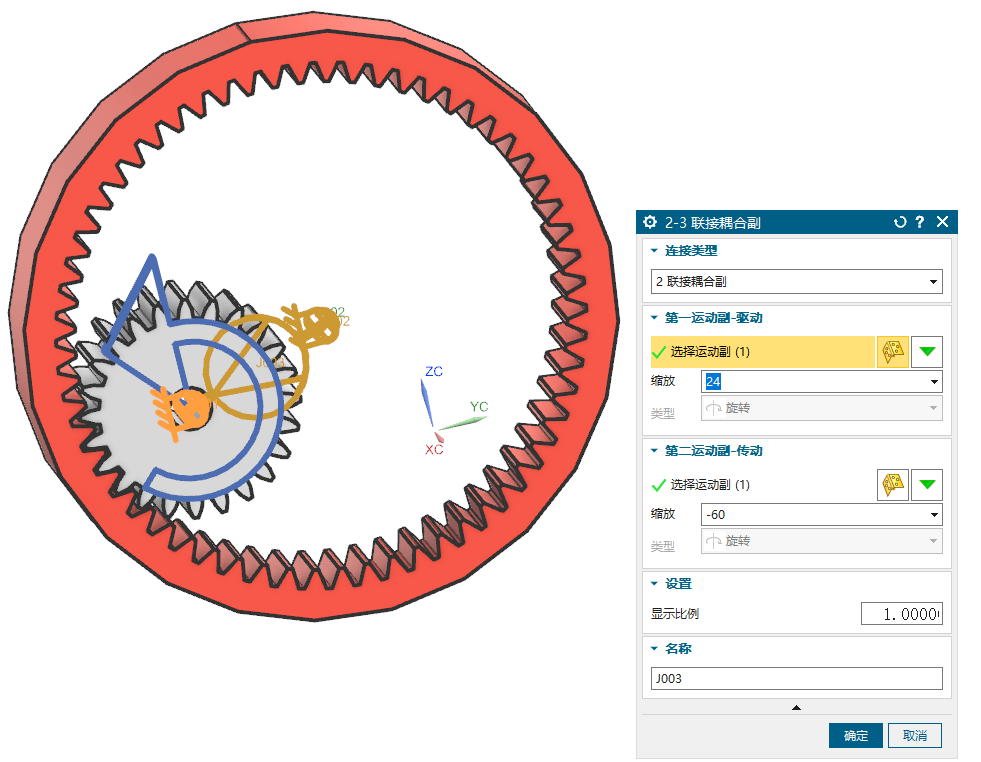
2 联接耦合副
2 联接耦合副就简单了,相当于只有一个动力输入和一个传动输出,也没啥说的了
k_1v_1+k_2v_2=0使用齿轮耦合副的模型,创建好运动体、旋转运动副(旋转运动副矢量方向相同)、驱动(小齿轮)
创建2 联接耦合副,这里缩放意义和齿轮齿数一样,小齿轮 24 齿,大齿轮 60 齿。内啮合齿轮同向旋转,根据上面的公式需要给系数加负号才能得到同向的运动,所以大齿轮填 -60。这个 2 联接耦合副其实就可以当作是齿轮耦合副使用。
动画
约束
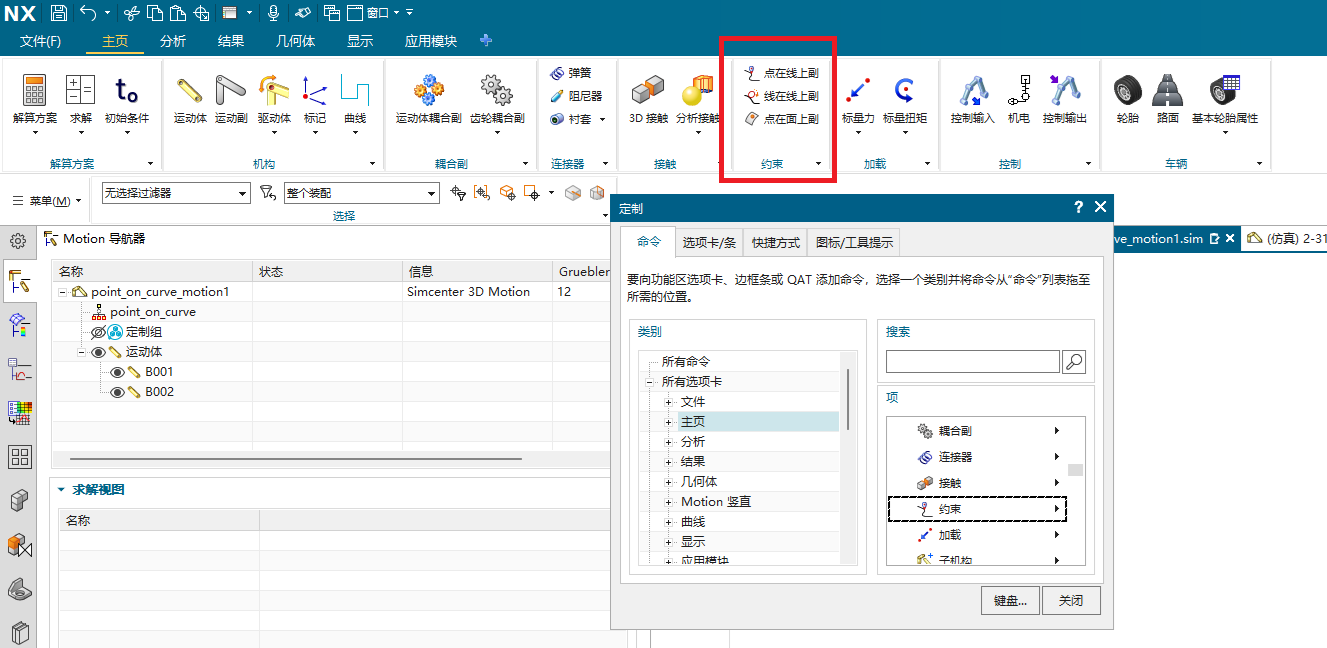
我这里 NX 主页栏没有显示约束选项卡

在功能区右键,点击最下面的定制
展开所有选项卡,点击主页,右侧可以看到有约束,点击约束不放开,将它拖动到主页功能区上即可

这样就把约束添加到功能区了,里面有:点在线上副、线在线上副、点在面上副
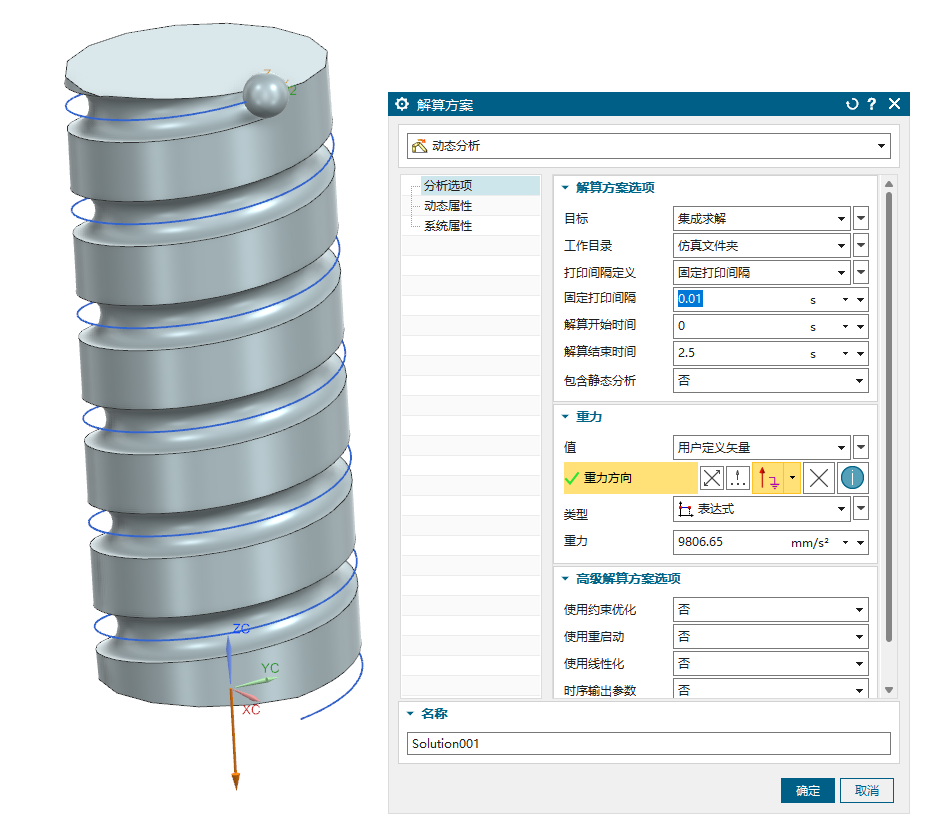
点在线上副
将导轨柱创建为规定运动体,将球创建为运动体
创建点在线上副,运动体选球,点选球心,曲线选导轨柱上的草图曲线

创建解算方案,解算结束时间2.5s,重力方向如图向下(Z负)
动画
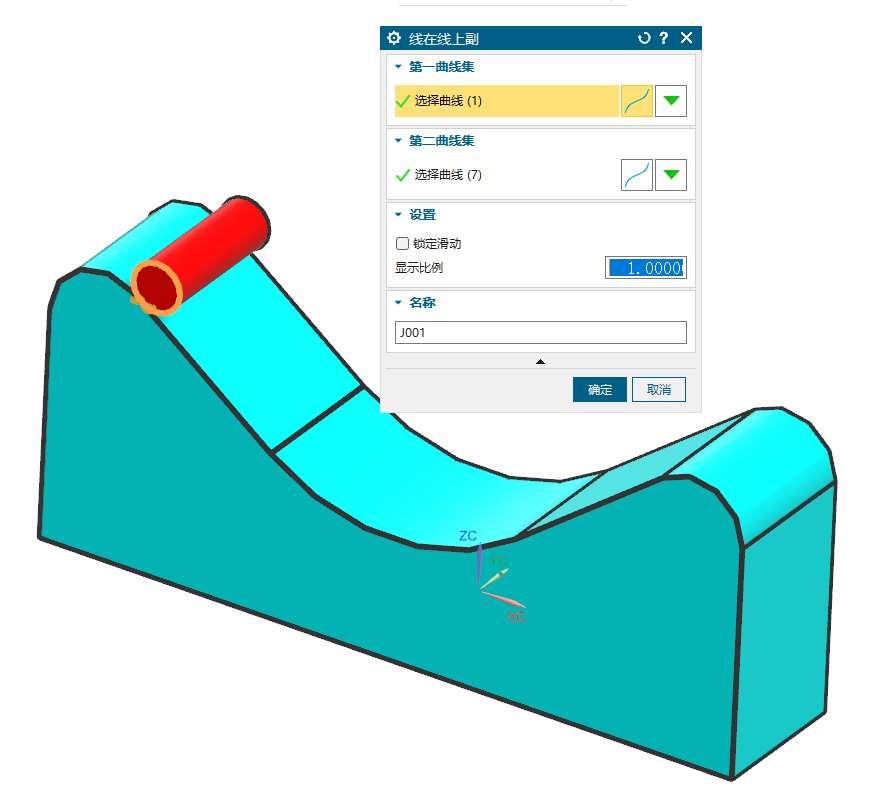
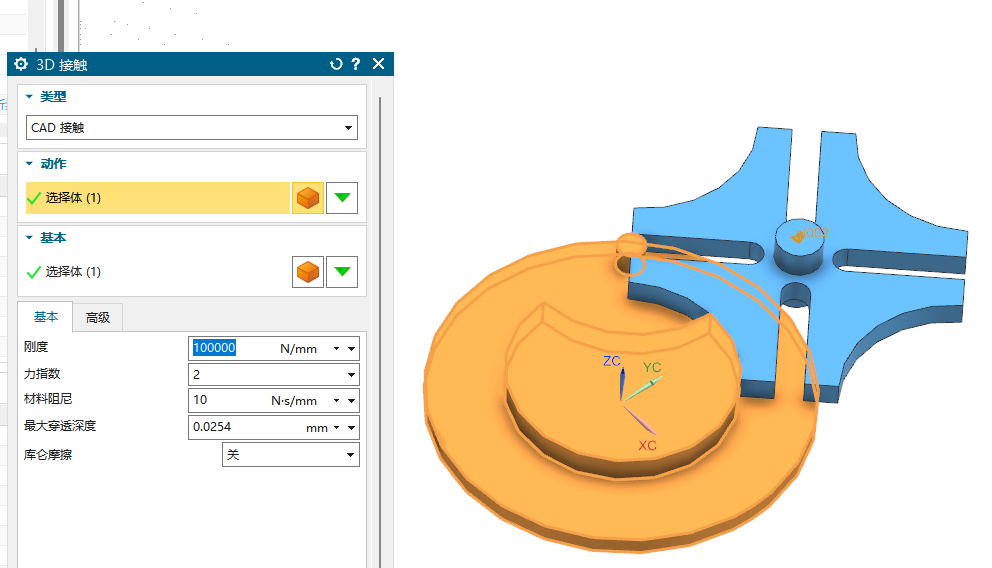
线在线上副 & 3D 接触
圆柱体创建为运动体,滑道创建为固定运动体
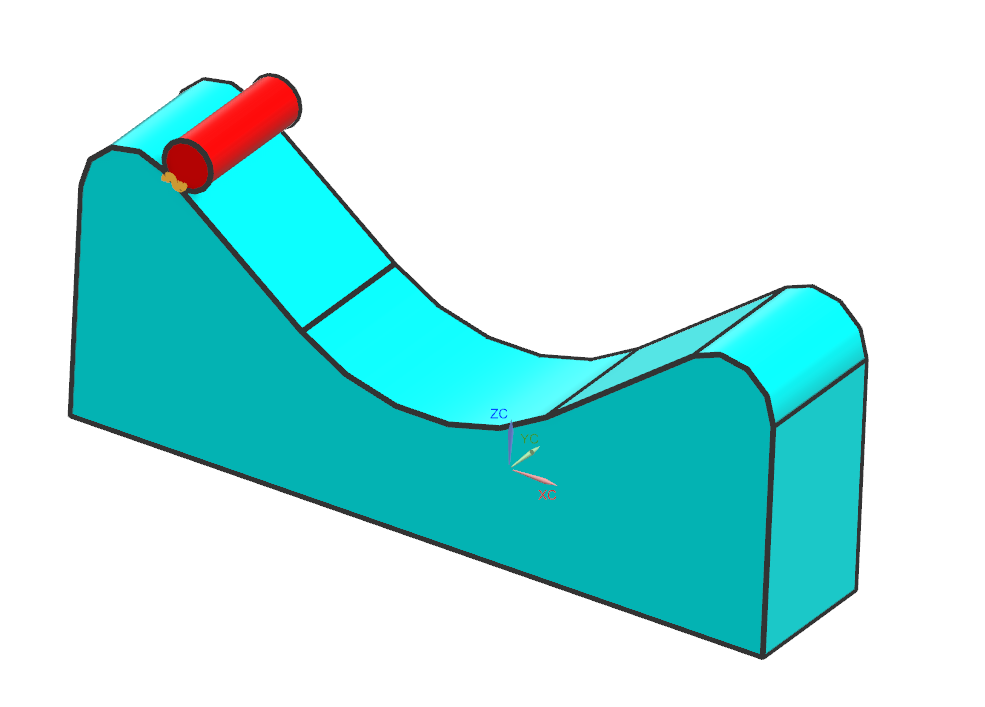
创建线在线上副
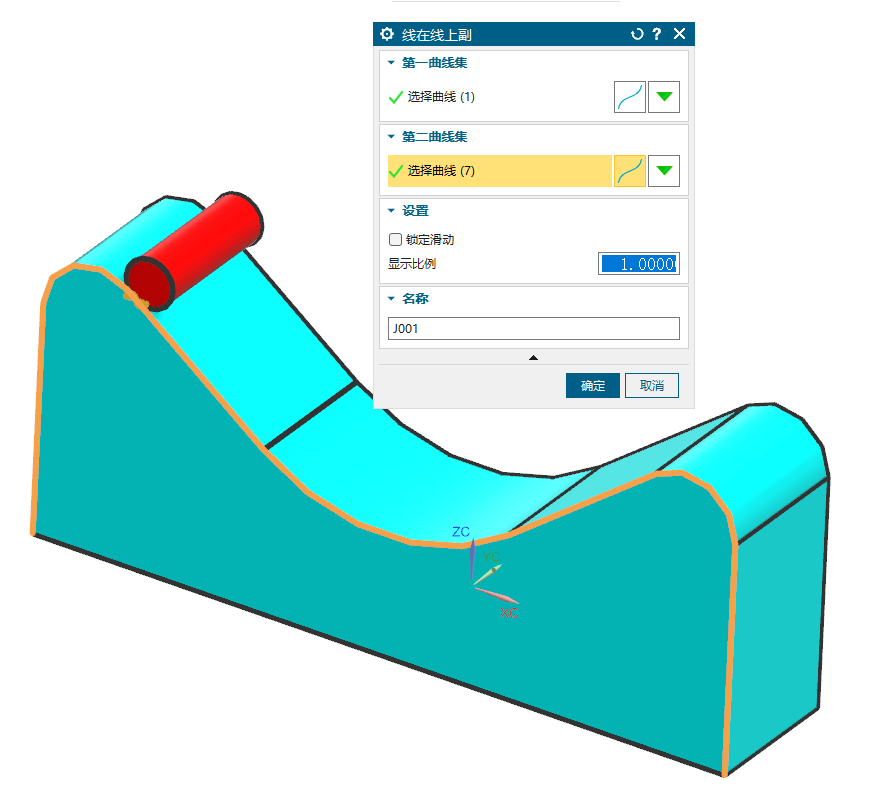
重力如图向下(Z负)
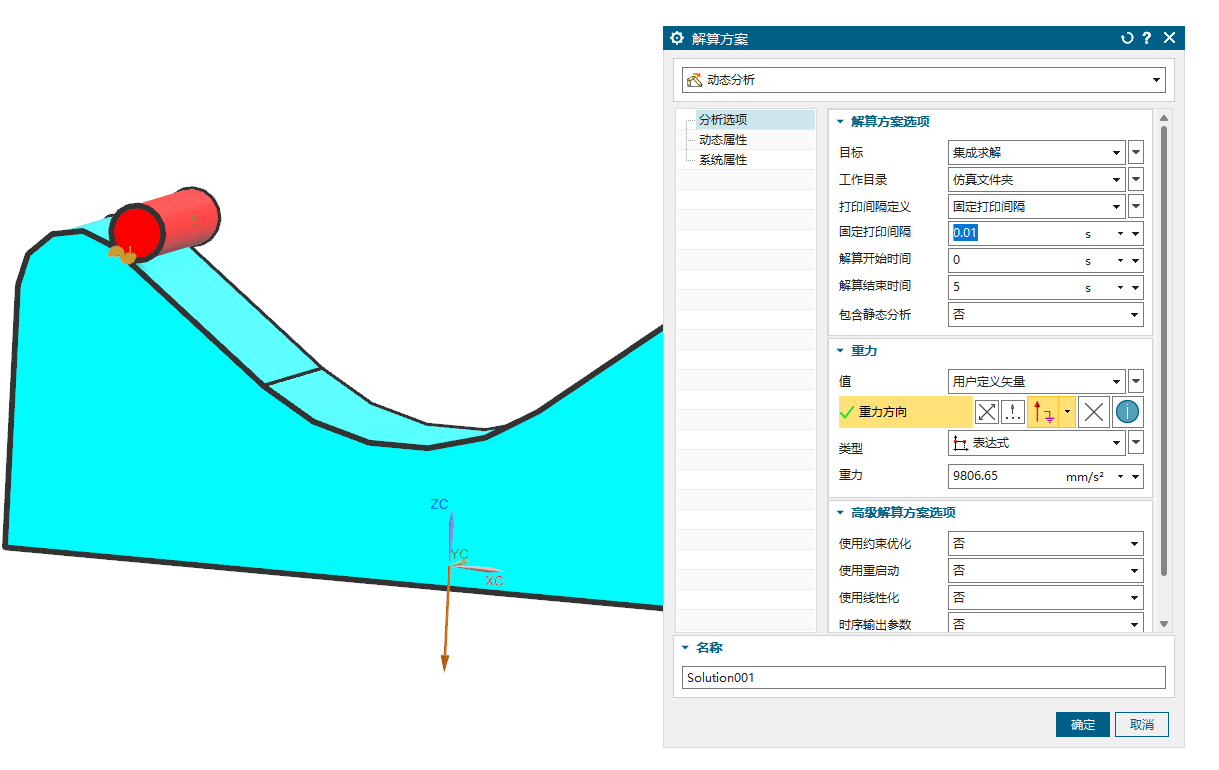
动画
圆柱边线可以沿着滑道边线运动
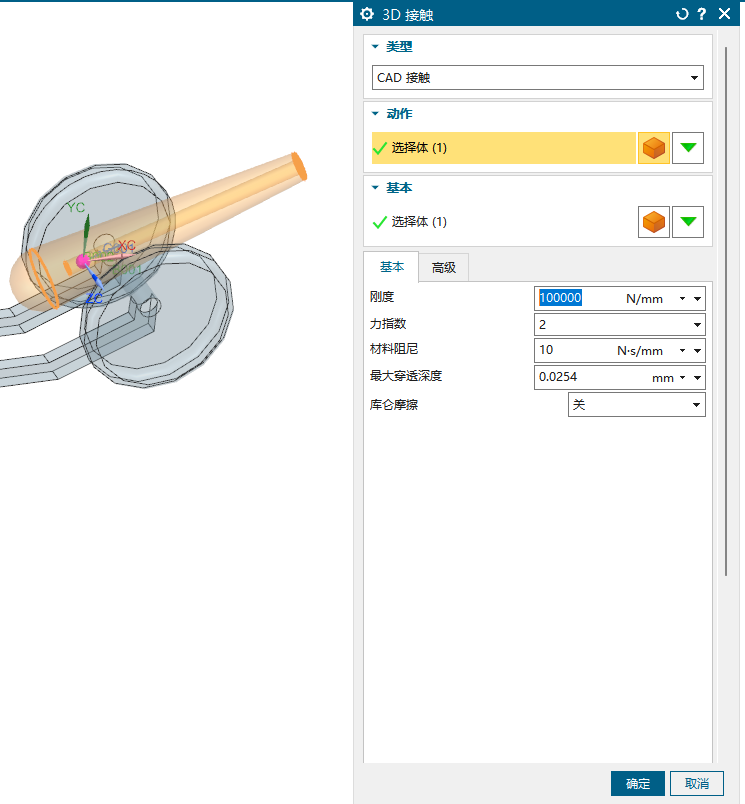
打开 3D 接触

动作体选圆柱,基本体选滑道
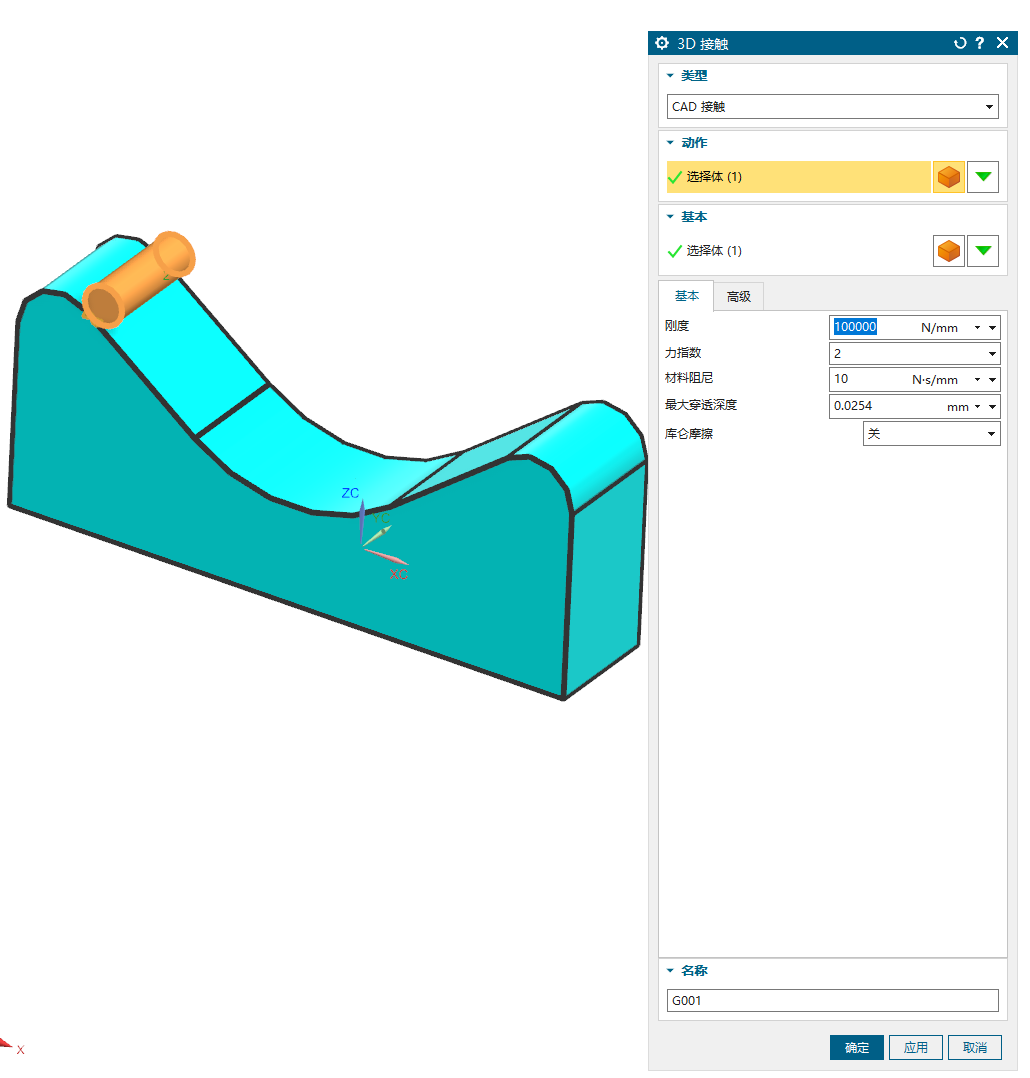
再次求解,播放动画
这次圆柱和滑道有物理接触关系了,然后在斜坡和圆弧面交接的地方被绊了一下就跳到外面了,由于线在线上约束存在被吊着
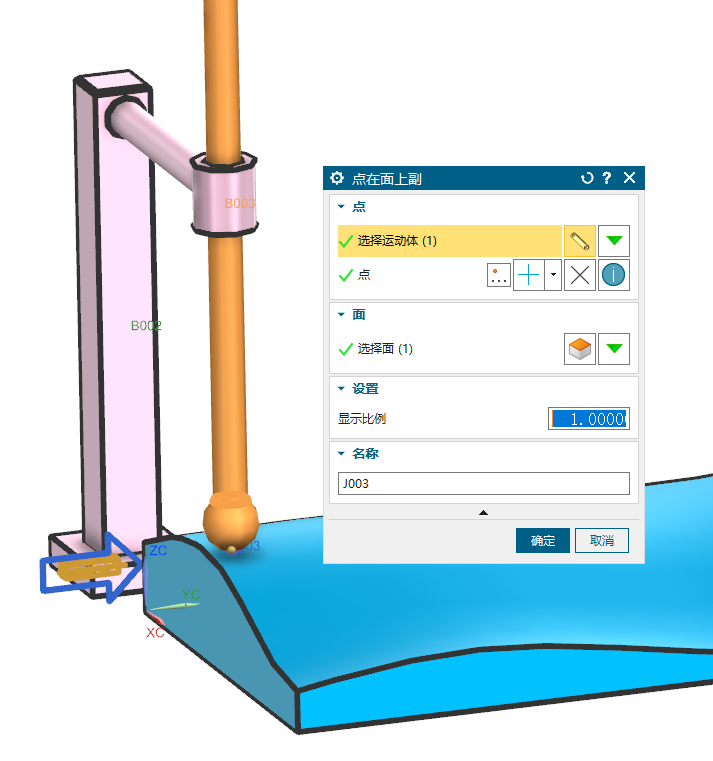
点在面上副
3 个零件都创建为运动体,坡道为固定运动体
为支架创建滑动副,矢量方向向右
为从动杆创建滑动副
为支架添加驱动
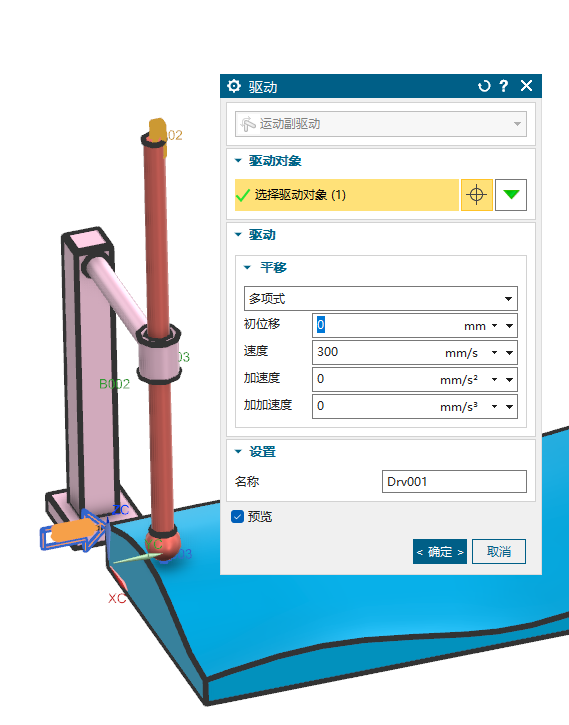
创建点在面上副,从动杆球面底部有一个点,可以选中作为接触点
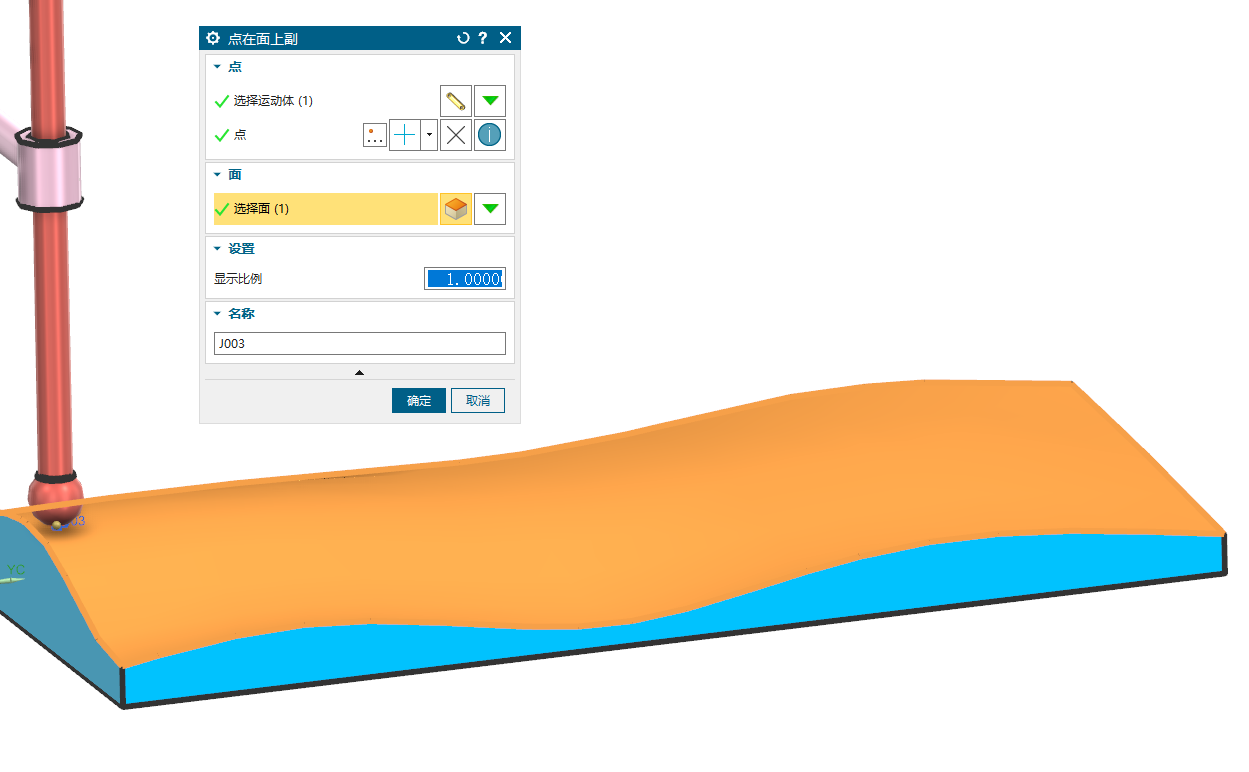
动画
连接器
弹簧
为底座和圆环创建运动体,底座固定
为圆环创建柱面副
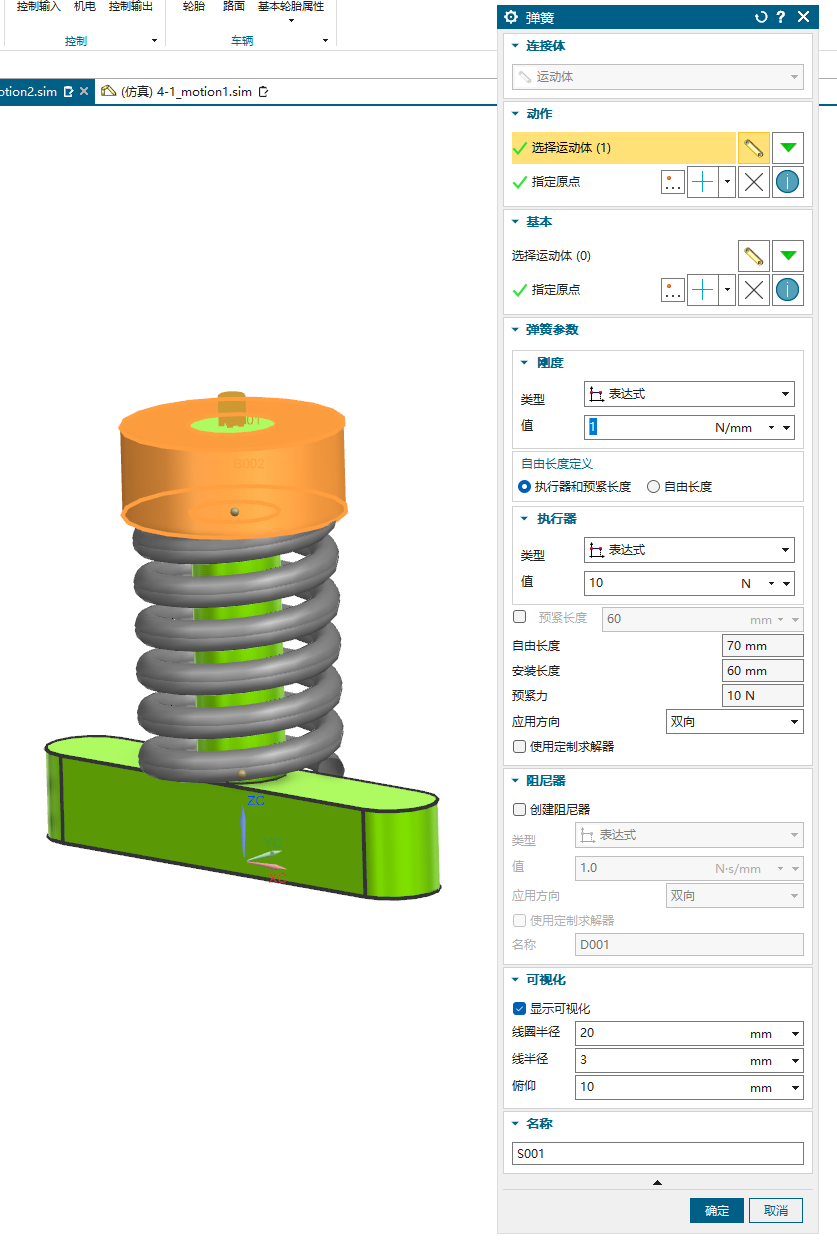
打开弹簧

动作运动体选圆环,原点指定一侧弹簧连接运动体面
基本原点指定另一侧弹簧连接面
刚度就是弹簧的劲度系数,单位形变量的力大小,填 1N/mm
执行器 值填弹簧的预紧力大小,填 10N
勾选显示可视化会显示可视化的弹簧,线圈半径是弹簧钢丝材料中心到弹簧中心的距离,填 20mm,线半径是弹簧钢丝材料圆柱半径,填 3mm,俯仰就是螺距,填 10mm。
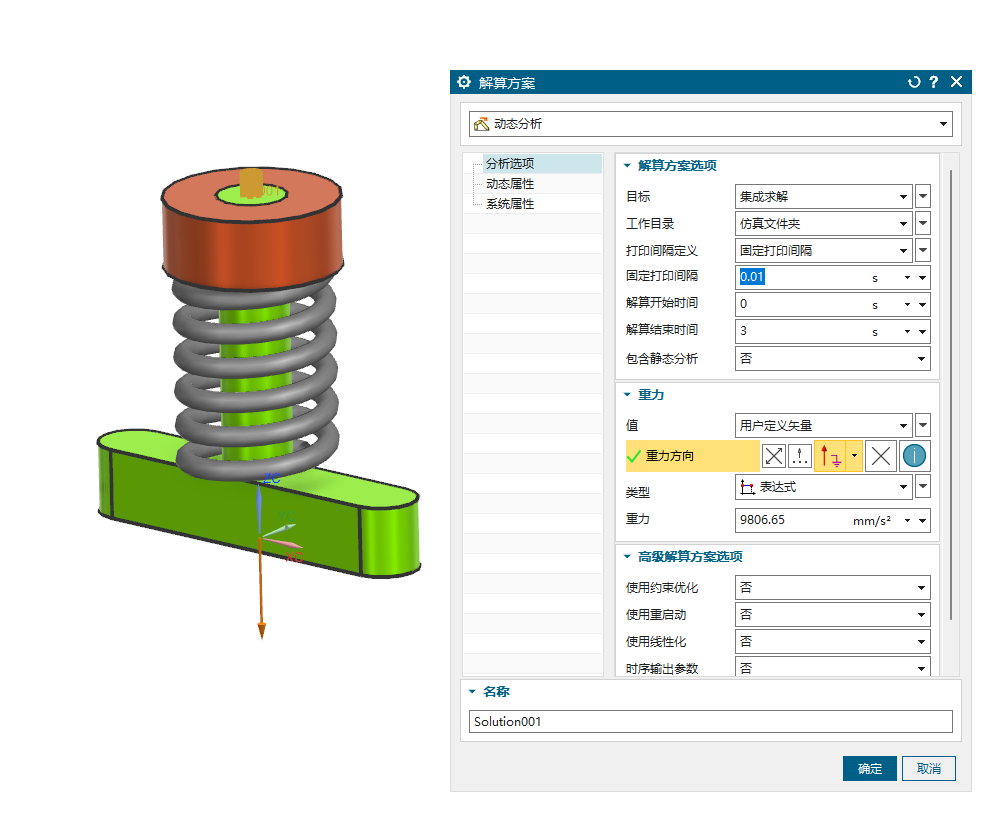
创建解算方案,重力如图向下(Z负)
动画
扭转弹簧
为 2 个零件各自创建运动体

创建旋转副

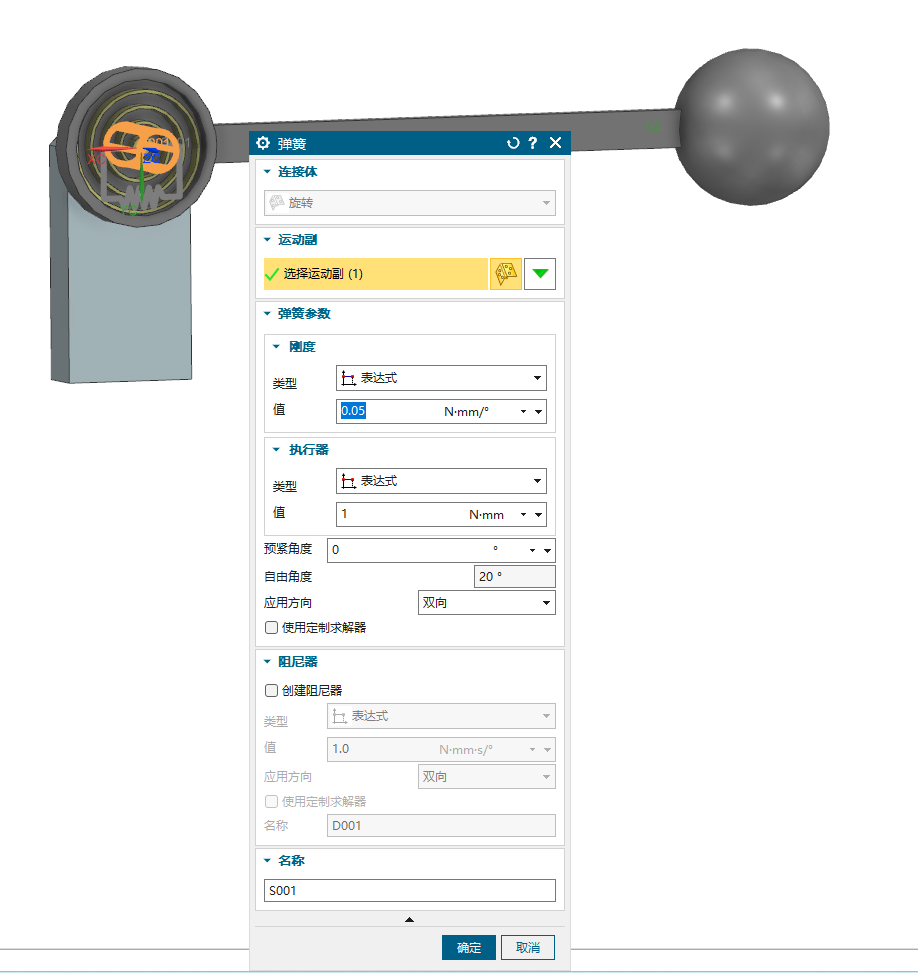
创建弹簧
连接体选旋转
刚度就是扭簧的劲度系数,单位旋转角度可提供的扭矩,这里填 0.05 N\cdot mm/°
执行器 值 填扭簧的预紧扭矩,这里填 1 N\cdot mm
创建解算方案,重力方向如图向下(Y正)

动画
阻尼器
将两个滑道创建为固定运动体,2 个滑块分别创建为运动体
为 2 个滑块分别创建滑动副
打开阻尼器
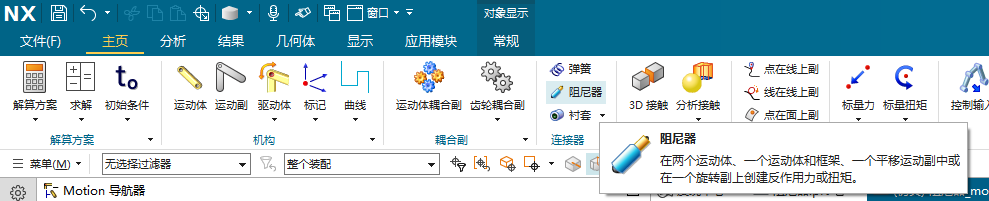
连接体选平移
运动副就选左边滑块的滑动副
阻尼大小填 0.005 N\cdot s/mm,阻尼器提供的阻力大小和运动速度有关,这个值就是单位速度 1mm/s 下提供的阻力大小多少 N,阻力大小和速度是正比关系,系数就是阻尼。
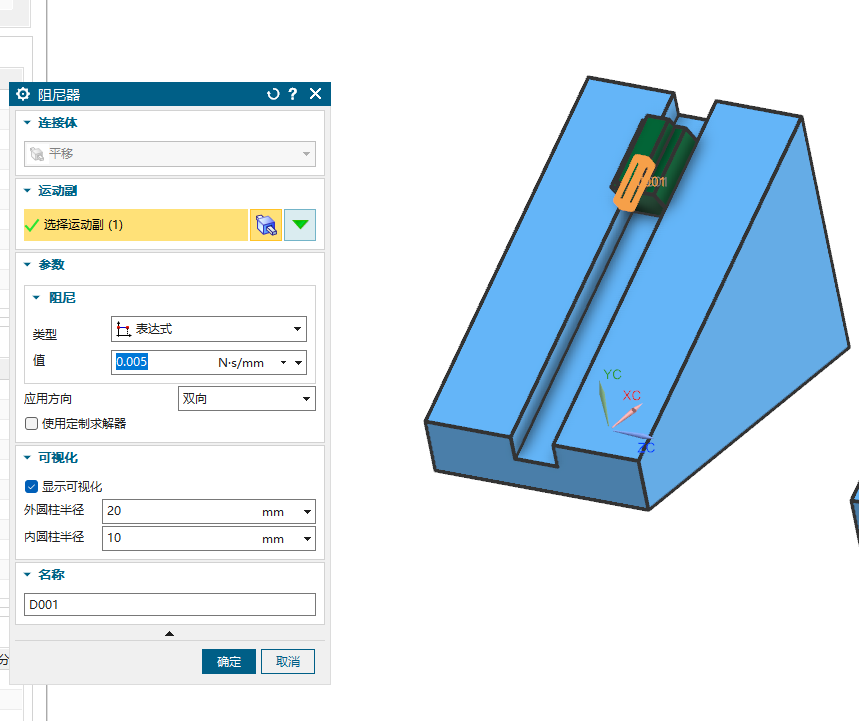
创建解算方案
重力方向如图向下(Y负)
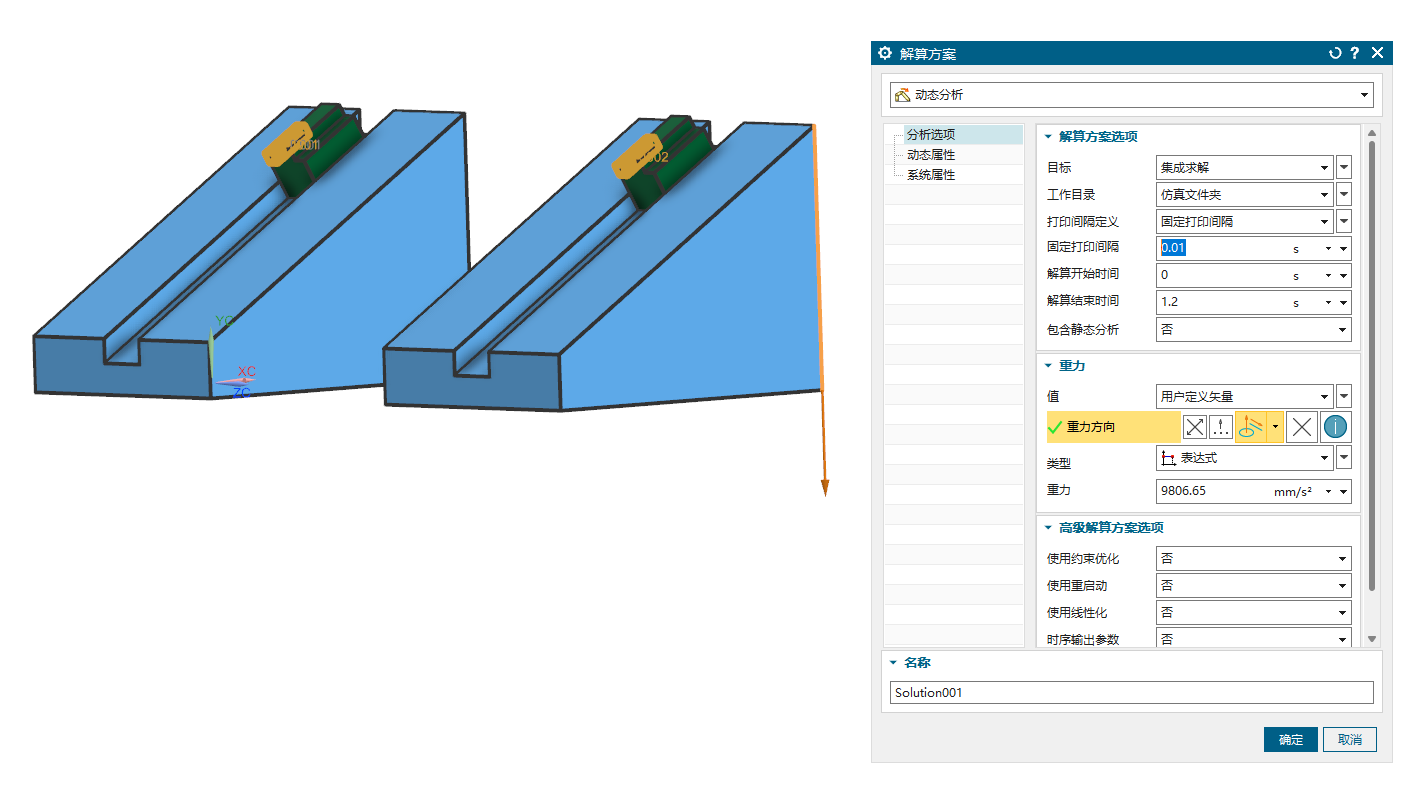
可以看到有阻尼器后,速度明显有差异
存在阻尼器的情况下,随着速度加快,阻力也在增加,导致加速度越来越小,速度增加越来越慢。当阻力和重力分量相等时,加速度为 0,开始保持匀速运动。
衬套
创建运动体
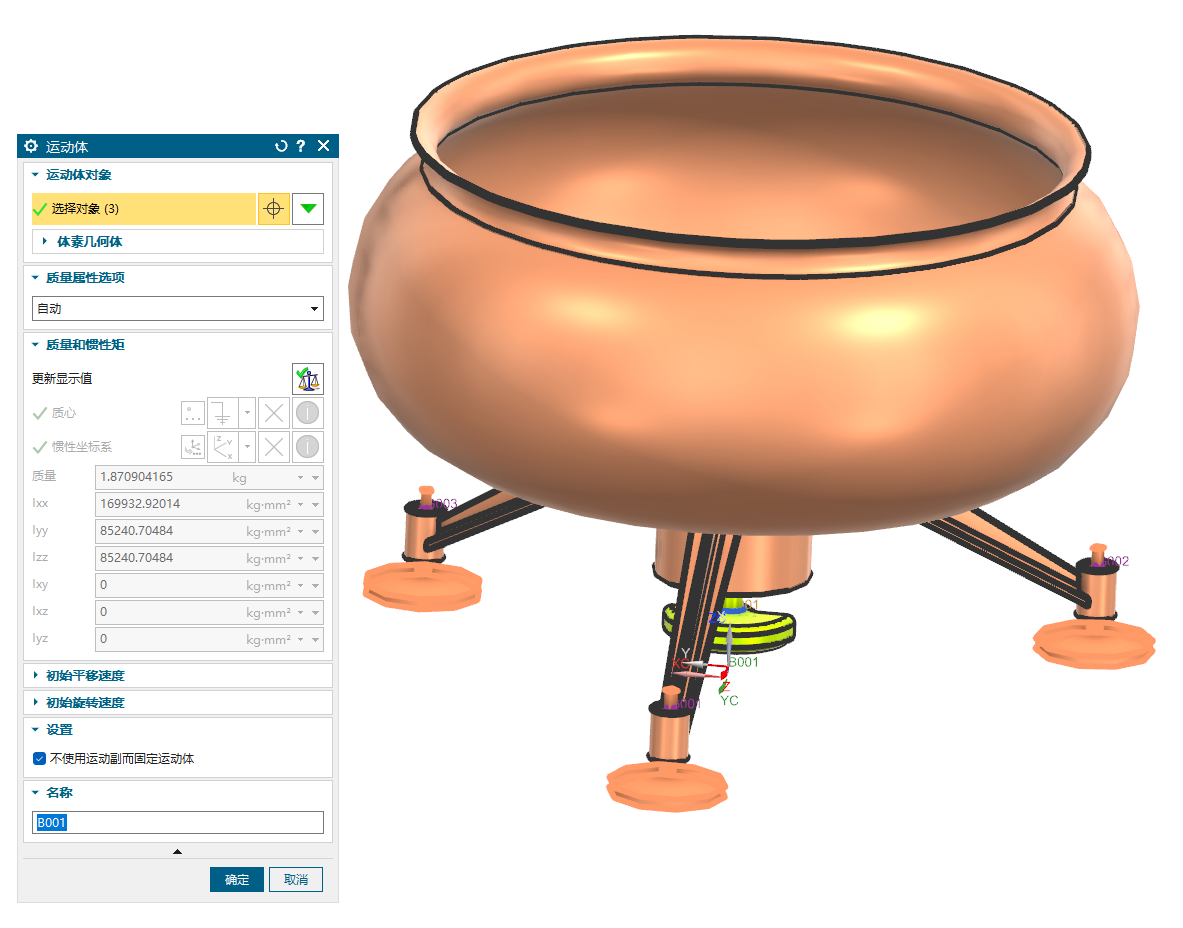
为偏心轮创建旋转副
打开衬套

注意动作和基本的原点、坐标系要在同一个位置
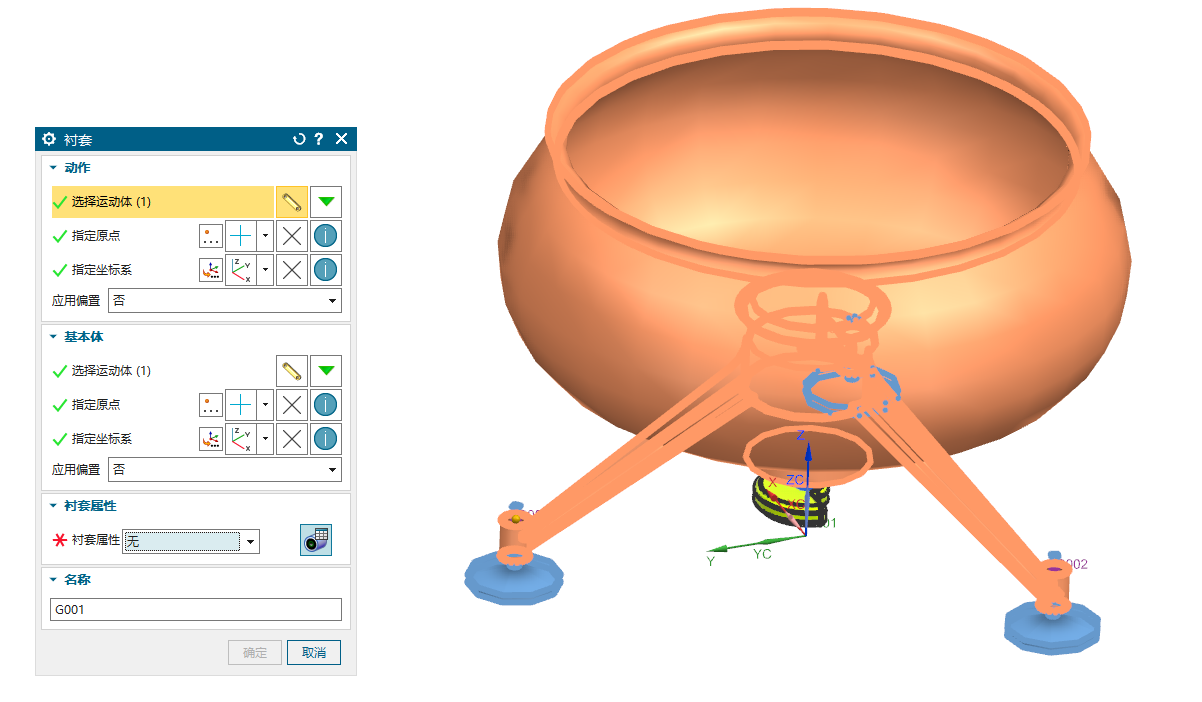
创建衬套属性
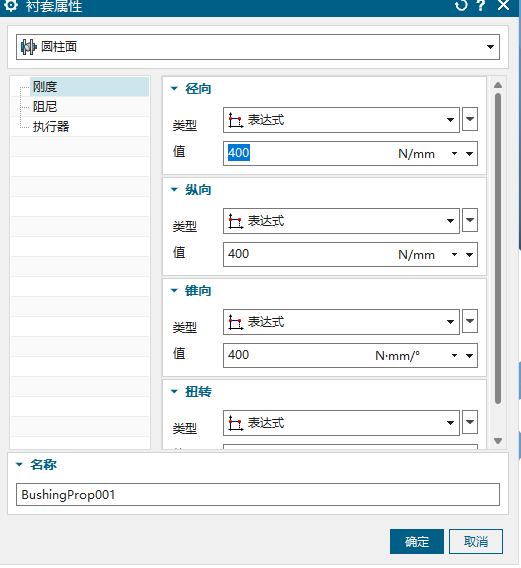
创建好属性会选中它,其它 2 只脚同样方式创建衬套,衬套属性就不用重复创建了,直接选择这里创建好的
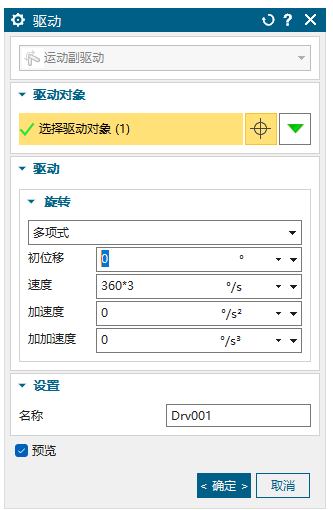
给偏心轮的旋转副创建驱动,可以填表达式,这里就是每秒 3 圈
动画
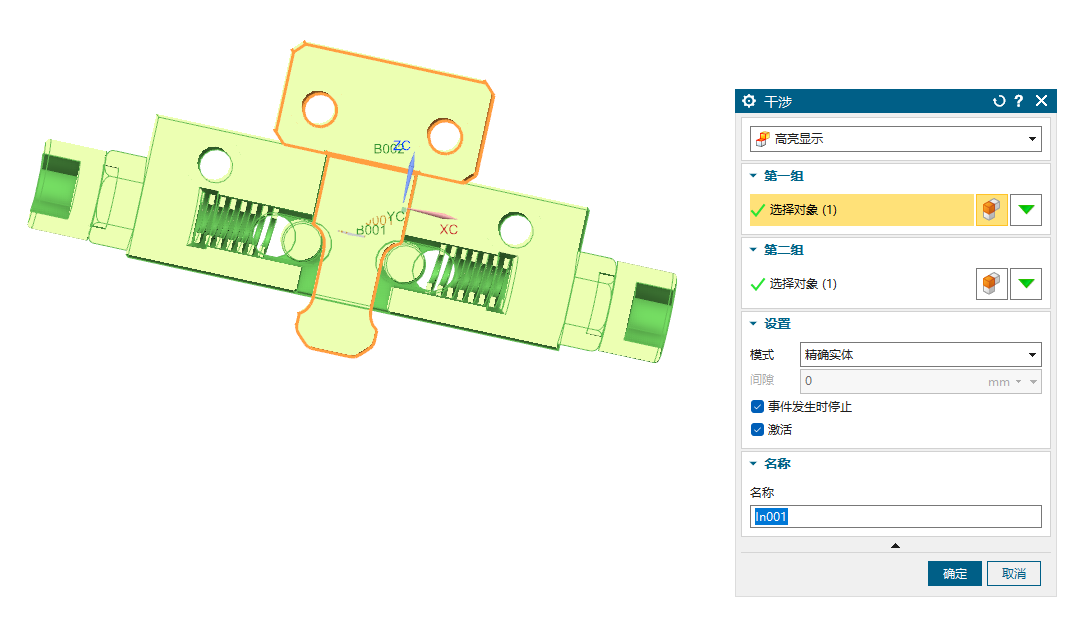
干涉
在分析中可以添加干涉
选择要检查干涉的 2 个运动体
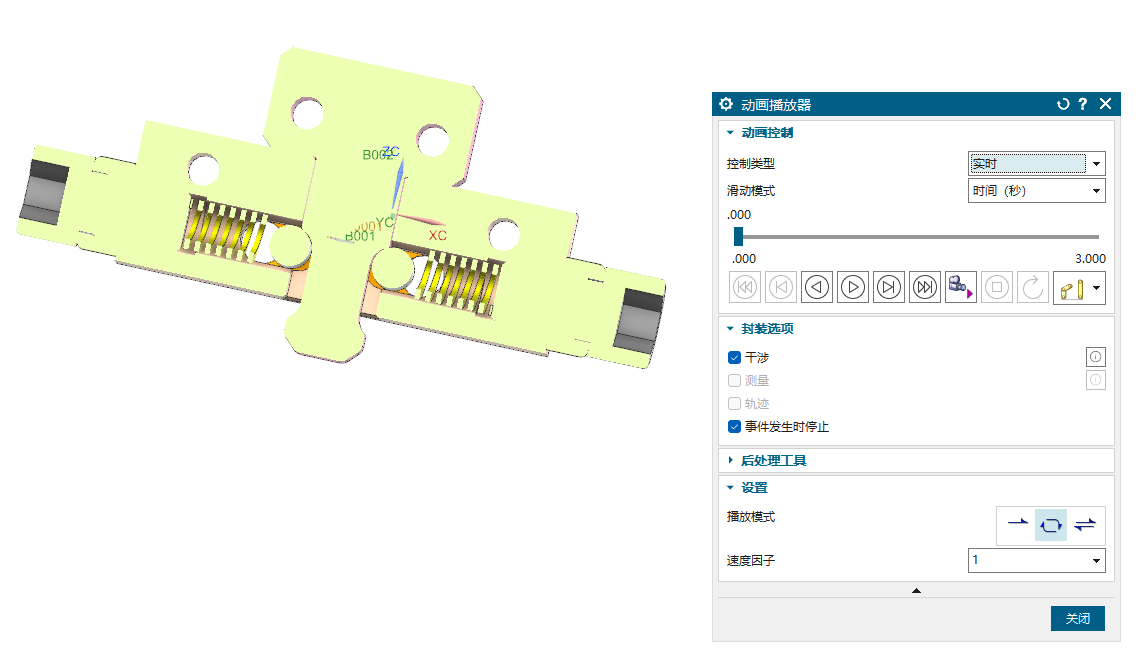
动画播放器中勾选干涉
槽轮机构 – 3D 接触
给 2 个零件分别创建运动体,并分别创建旋转副
创建3D 接触
给圆盘创建驱动
动画
标量力&矢量力
矢量力是指定好力的大小和方向;
标量力是指定好大小,方向由约束等决定。
2 个零件分别创建运动体,并创建旋转副
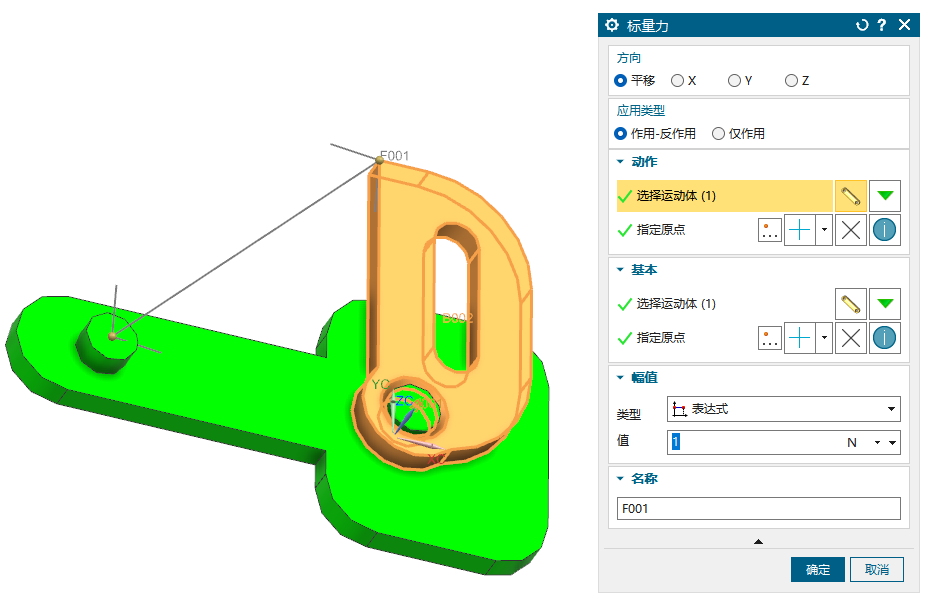
打开标量力

在两个运动体上各选择一个作用点,应用类型选的作用-反作用,那么就会在两点形成一对反向等大小的力,仅作用则是只施加力,没有反作用力,相当于是一个外部施加的力,反作用力不作考虑。力为正数则互推,力为负数则互拉。
起始受力运动顺时针加速旋转,转过 90° 后力起减速效果,开始减速旋转直到停下,然后又在力作用下逆时针加速旋转,一直往复。
然后删除前面创建的标量力,再打开矢量力

参考里运动体还是还是选蓝色的运动体,矢量选面得到它的法向,这样力的方式就是始终垂直于物体的这个面。
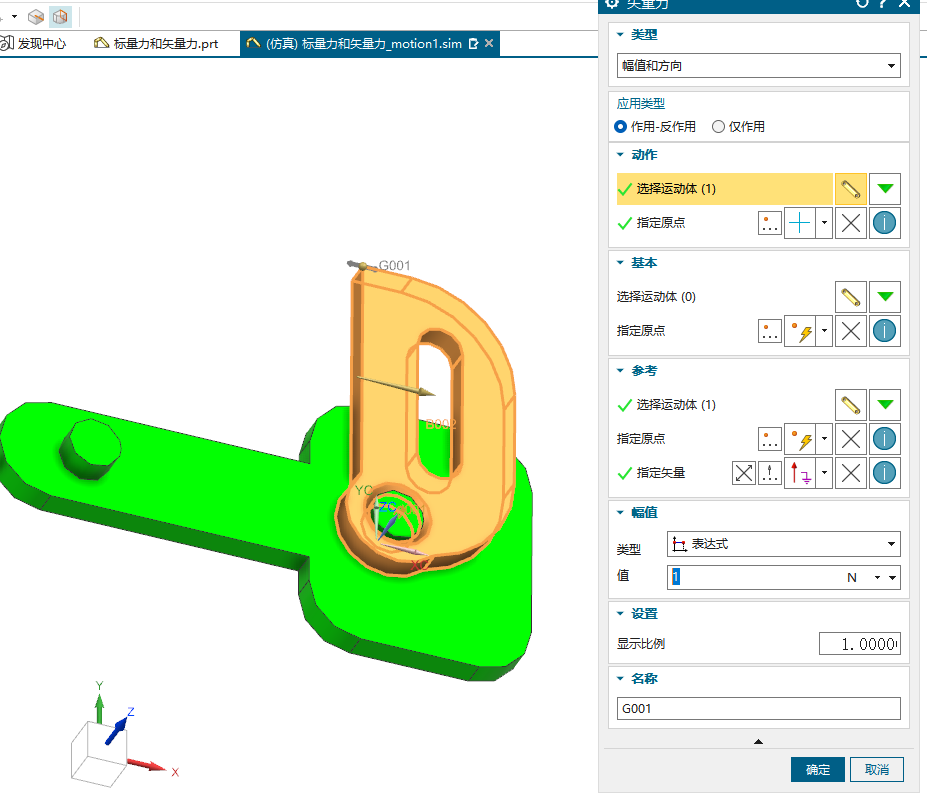
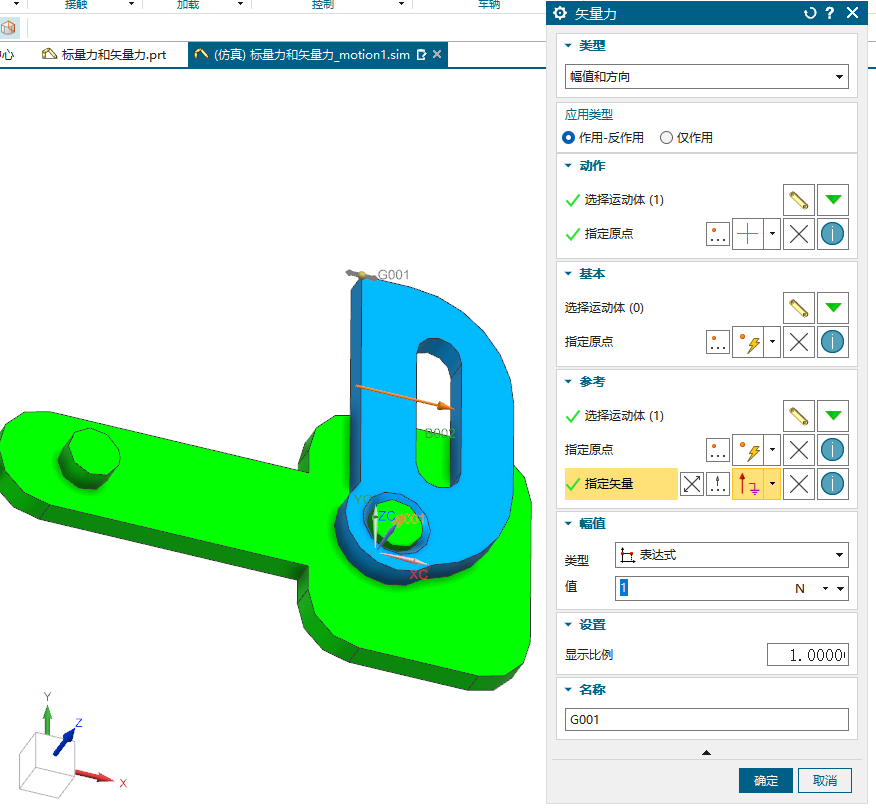
这个力对于运动体始终是固定方向,物体旋转会一直加速
标量扭矩&矢量扭矩
2 个零件分别创建运动体,并创建旋转副
打开标量扭矩

可以直接选旋转副
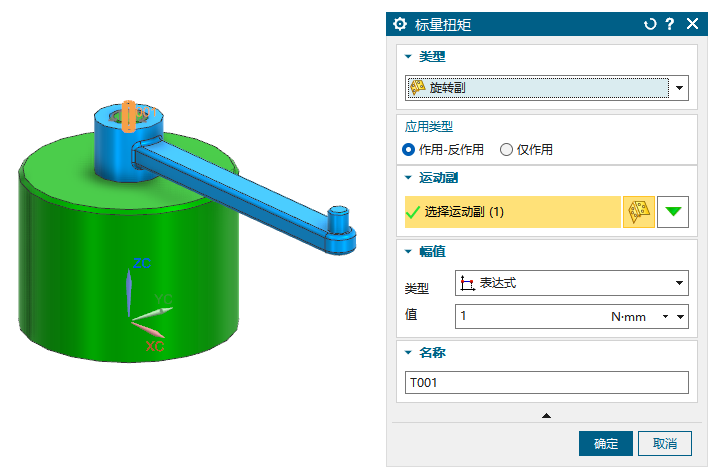
动画
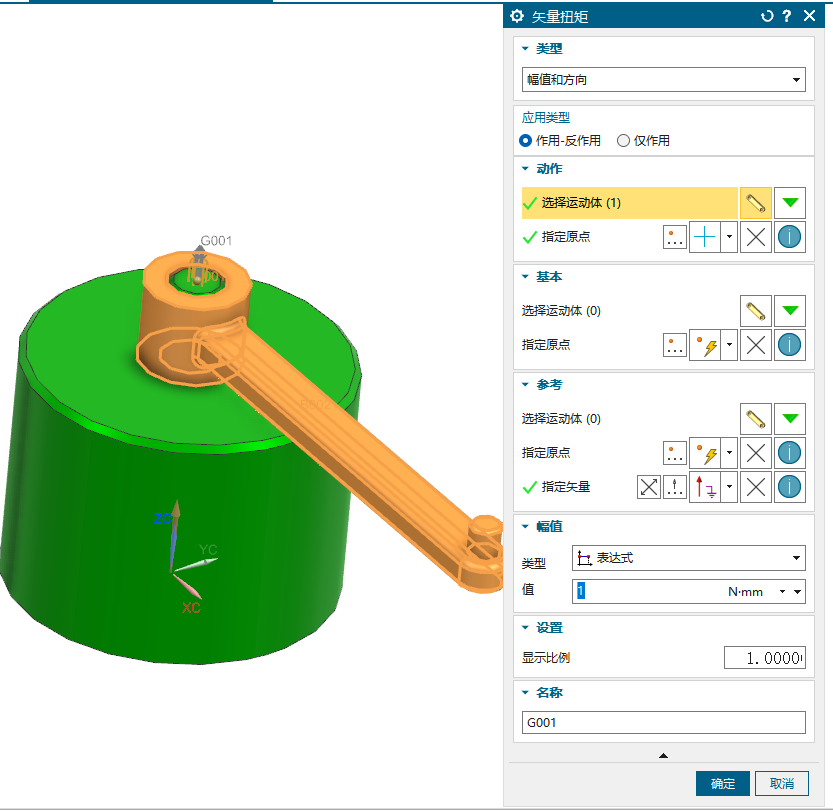
删除前面创建的标量扭矩,打开矢量扭矩

选择参与运动的运动体,原点指定旋转中心所在,参考–矢量指定旋转的轴向,同时确定了旋转方向。最终效果和标量扭矩一样,只是设置方式不同。
加农炮&数学函数的使用
创建运动体,炮架和炮管一体为固定运动体,炮弹为运动体
创建炮弹和炮的3D 接触
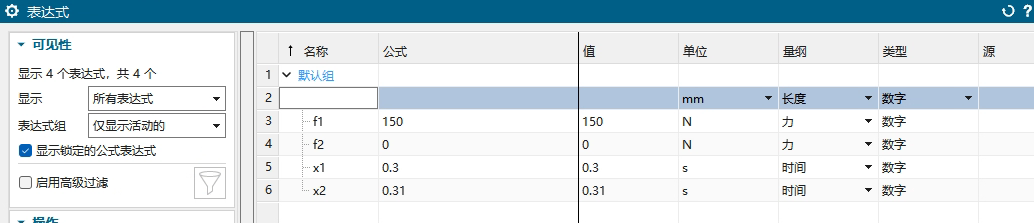
按Ctrl+E打开表达式,设置发射炮弹的参数。0-0.3s 对炮弹施加 150N 力,0.3-0.31s 力递减为 0,0.31s 以后力为零。因此创建 4 个表达式。x1=0.3s,x2=0.31s,f1=150N,f2=0N。
创建矢量力
动作运动体选炮弹,原点选炮弹的球心
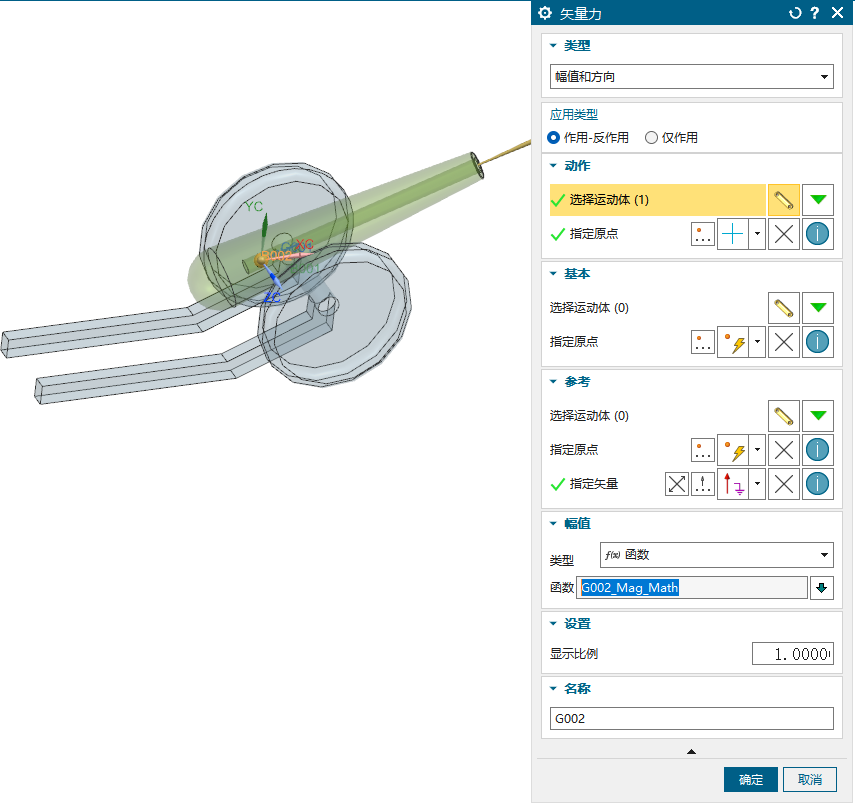
参考矢量选炮管口端面,得到法相矢量,方向向外
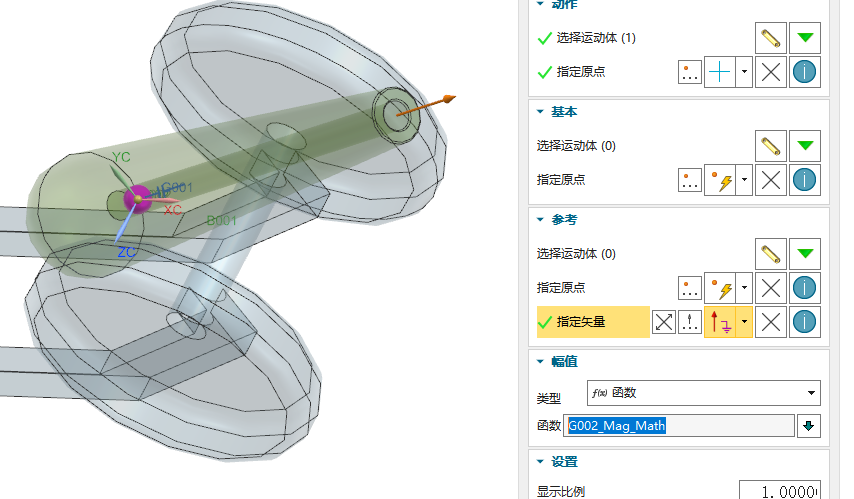
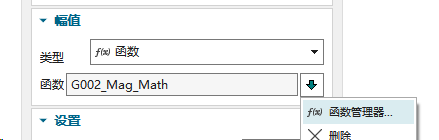
在幅值中,类型选函数,然后点击右侧箭头展开,点函数管理器
点击图标新建
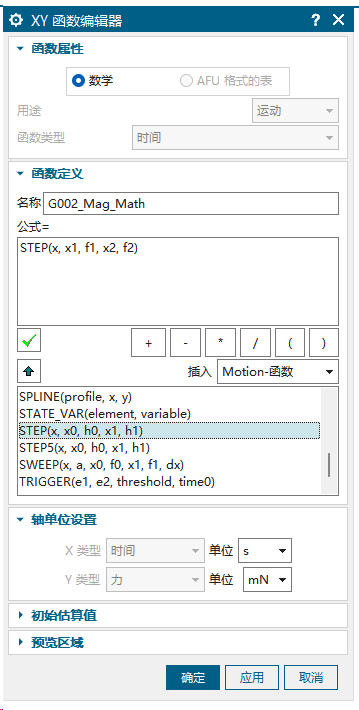
插入选Motion-函数(运动函数 ),双击插入 STEP(x, x0, h0, x1, h1),然后编辑把 x0 改为表达式 x1,h0 改为表达式 f1,x1 改为表达式 x2,h1 改为表达式 f2。这里参数都是使用前面创建的表达式,如果直接输入数值可能会报错:……必须具有相同量纲。/ 数学函数定义无效。
我再单独解释一下 STEP(x, x0, h0, x1, h1) 函数,x 就是仿真时的时间。当 x 不超过 x0 时函数值为 h0;当 x 值位于 x0 和 x1 值之间时,函数值随时间增加,从 h0 平滑过渡到 h1;当 x 大于等于 x1 时,函数值为 h1。
创建追踪,选炮弹
创建解算方案,重力方向可以选炮架的边线,沿 Y 负方向
动画